 | | | | | |
Kevin, in preparation for our co-build, what sorts of ideas would
you like to pursue; ie... what kind of bot would you like to build?
Scorpion?
Quadra-ped?
Pnuemo Asst’d Arm?
Hexapod?
Cente-Milli-ped?
Or, what would the rest of you like to see us build?
Thoughts?
Come on the King of Pnuematics and the Grand Hebero of Studs getting
together to build somthing? What will we make? What would you like to see?
e
Biomechanical Bricks on LUGNET
| | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build, what sorts of ideas would
you like to pursue; ie... what kind of bot would you like to build?
Scorpion?
|
Never done, so it sounds interesting.
Done one, so this will be a game of playing with geometries. Sounds like fun.
Hmmmm..... Never done an arm.
Done one, working on the second..... I’d love to see it with skins.
Chinese dragon?
| |
Or, what would the rest of you like to see us build?
Thoughts?
Come on the King of Pnuematics and the Grand Hebero of Studs getting
together to build somthing? What will we make? What would you like to see?
e
|
K
| | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
|
| |
| |
Or, what would the rest of you like to see us build?
Thoughts?
Come on the King of Pnuematics and the Grand Hebero of Studs getting
together to build somthing? What will we make? What would you like to see?
e
|
K
|
So are you guys getting together in person for this co-build? Man, what I’d give
to be there and watch you guys at work. Eric was over last fall and whipped up
some basic gear assemblies out of my collection in a way that blew my mind. Some
people flow with the brick, Eric is one of them, I’m not.
-Tim
| | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Tim Courtney wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
|
| |
| |
Or, what would the rest of you like to see us build?
Thoughts?
Come on the King of Pnuematics and the Grand Hebero of Studs getting
together to build somthing? What will we make? What would you like to see?
e
|
K
|
So are you guys getting together in person for this co-build? Man, what I’d
give to be there and watch you guys at work. Eric was over last fall and
whipped up some basic gear assemblies out of my collection in a way that blew
my mind. Some people flow with the brick, Eric is one of them, I’m not.
|
We have not made any travel plans yet for this exciting colaboration. I plan on
going to BrickFest in August, hopefully Eric will be there too. By then, we may
be done already.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Tim Courtney wrote:
|
| |
| |
So are you guys getting together in person for this co-build? Man, what I’d
give to be there and watch you guys at work. Eric was over last fall and
whipped up some basic gear assemblies out of my collection in a way that
blew my mind. Some people flow with the brick, Eric is one of them, I’m not.
|
We have not made any travel plans yet for this exciting colaboration. I plan
on going to BrickFest in August, hopefully Eric will be there too. By then,
we may be done already.
|
That would rock to see the results of collaboration unveiled at BrickFest.
How big of an air compressor is it going to need? ;-)
-Tim
| | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build,
|
|
Two thoughts come to mind:
1. If you make a Pnuemo-bot, I’ll grow a brick skin on to it.
-or-
2. I create the frame and place all the pistons at the joints,
then send it to you.
You, then create the air circuts, and sequence them to do something cool.
Then you send it back, Then, I complete the construction.
3. Alternate ideas - open.
e
P.S. I’m footing ALL the peices.
| | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build,
|
|
Two thoughts come to mind:
1. If you make a Pnuemo-bot, I’ll grow a brick skin on to it.
|
Well I could document quad242 and you could use that as a basis for a design.
You could mutate it all you want once you rebuild the original.
| |
-or-
2. I create the frame and place all the pistons at the joints,
then send it to you.
You, then create the air circuts, and sequence them to do something cool.
Then you send it back, Then, I complete the construction.
|
The trick with my style of pneumatic designs is that each piston needs to
control two switches, so it would not be enough to put the pistons in place.
You’d also need to make sure the switches are in place as well.
If we decided on the kind of creature we wanted to make, and the general
articulations and movements of the creature, I could design the pneumatic
circuit, and then you could build the creature from there.
I have pneumatic designs for bipeds, quadrapeds, hexapods, and inchworms. Any
one of these could be a basis for an Eric Sophie build.
My inchworm has a very nice undulating style of walking, and I can only imagine
the beautius Chineese dragon you could make out of that.
Hex363 is a great candidate for you to put skins on.
Then again, something completely new would be fun also.
If we pick a creature type that we want, identify the articulations we want, and
the movement patterns we want, I can lay out the circuit.
For me, a new pneumatic circuit would be more fun than reeusing an old design,
although using an old design with Spohie Style would be fabulous as well.
| |
3. Alternate ideas - open.
|
How many pistons and switches do you have?
| |
e
P.S. I’m footing ALL the peices.
|
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
2. I create the frame and place all the pistons at the joints,
then send it to you.
You, then create the air circuts, and sequence them to do something cool.
Then you send it back, Then, I complete the construction.
|
Hex363 is a great candidate for you to put skins on.
|
I think it would be cool to create a scorpion. Of course, they have eight legs,
and they should move as four sets of two (not two sets of four).
Oh, and you know what would be cool? Make it remote control-able.
hmm. I have some ideas. You guys need my help. :) Ok, so you don’t really
need my help, but I’d like to offer my assistance.
A pet scorpion would be fun...
Steve
http://www.teamhassenplug.org/
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
2. I create the frame and place all the pistons at the joints,
then send it to you.
You, then create the air circuts, and sequence them to do something cool.
Then you send it back, Then, I complete the construction.
|
Hex363 is a great candidate for you to put skins on.
|
I think it would be cool to create a scorpion. Of course, they have eight
legs, and they should move as four sets of two (not two sets of four).
|
So far, this is my preference. Doing two groups of four is a simple extension
of quad242 or hex363’s circuitry. Now, making it turn is a different issue.
| |
Oh, and you know what would be cool? Make it remote control-able.
|
I want to do this for my hexapod too.
| |
hmm. I have some ideas. You guys need my help. :) Ok, so you don’t really
need my help, but I’d like to offer my assistance.
|
Thanks for the offer Steve.
| |
A pet scorpion would be fun...
|
I agree.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
>
>
> > Kevin, in preparation for our co-build, what sorts of ideas would¬
> > you like to pursue; ie... what kind of bot would you like to build?¬
> >
> > Scorpion?¬
> >
> >
>
>
>
If you two are really looking for something new.... How about 0 legs...
A snake?
-Kyle
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kyle McDonald wrote:
> Kevin L. Clague wrote:
>
> > In lugnet.technic, Eric Sophie wrote:
> >
> >
> > > Kevin, in preparation for our co-build, what sorts of ideas would¬
> > > you like to pursue; ie... what kind of bot would you like to build?¬
> > >
> > > Scorpion?¬
> > >
> > >
> >
> >
> >
> If you two are really looking for something new.... How about 0 legs...
> A snake?
>
> -Kyle
Hi Kyle,
Good to see you de-lurking :^)
I've always got more ideas for locomotion than I have time to implement.
I wondered if making a two dimensional inchworm
http://www.kclague.net/Inchworm/index.htm
would travel like a sidewinder rattlesnake.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |

|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Kyle McDonald wrote:
> > How about 0 legs... A snake?
> >
> > -Kyle
>
> Hi Kyle,
> Good to see you de-lurking :^)
>
> I've always got more ideas for locomotion than I have time to implement.
>
> I wondered if making a two dimensional inchworm
>
> http://www.kclague.net/Inchworm/index.htm
>
> would travel like a sidewinder rattlesnake.
>
> Kevin
I have a plan in mind for a sidewinding snake. It would be composed of 32
similar segments, each connected to the next by a pivot with two opposing
cylinders driving it. The idea is that there is a main extended flip-flop of 8
variables, where each variable of the flip-flop controls every eighth segment,
so that four segments do the same thing. The pivots move by +/- 45 degrees
relative to the next segment.
The snake begins in an M shape, with 'feet' on the underside of the five
straight segments in one direction only being on the ground, the other feet
being retracted. Feet are only extended when the segment is in the correct
orientation and are retracted at other times. They may be driven by small
cylinders and don't need to be monitored by switches.
It is possible that the opposing cylinder sets will be composed of four
cylinders - two set of two cylinders in series, such that when one pair are
extended and the other retracted, the two segments will line up straight,
However, this would need 128 cylinders and may extend the flip-flop to 16
variables, requiring 16 lots of several switches!
Once the snake will sidewind, the next challenge is to get its head to keep
pointing the same way all the time. I think a car tyre air compressor (set to
25-30psi) is a prerequisite!
This'll keep Kevin busy for weeks! :-)
Mark
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> I have a plan in mind for a sidewinding snake. It would be composed of 32
> similar segments, each connected to the next by a pivot with two opposing
> cylinders driving it. The idea is that there is a main extended flip-flop of 8
> variables, where each variable of the flip-flop controls every eighth segment,
> so that four segments do the same thing. The pivots move by +/- 45 degrees
> relative to the next segment.
>
> The snake begins in an M shape, with 'feet' on the underside of the five
> straight segments in one direction only being on the ground, the other feet
> being retracted. Feet are only extended when the segment is in the correct
> orientation and are retracted at other times. They may be driven by small
> cylinders and don't need to be monitored by switches.
>
> It is possible that the opposing cylinder sets will be composed of four
> cylinders - two set of two cylinders in series, such that when one pair are
> extended and the other retracted, the two segments will line up straight,
> However, this would need 128 cylinders and may extend the flip-flop to 16
> variables, requiring 16 lots of several switches!
>
> Once the snake will sidewind, the next challenge is to get its head to keep
> pointing the same way all the time. I think a car tyre air compressor (set to
> 25-30psi) is a prerequisite!
>
> This'll keep Kevin busy for weeks! :-)
I was presuming that I'd have 6-8 segments, where each segment (except the last)
has two pistons, and four switches (at least). Given how large inchworm is,
getting any larger would make it difficult to transport.
Inchworm took me about four hours to come up with a good geometry for a segment,
then about an hour to replicate all the segments, and an hour to hook up (if
this were electronics I'd say wired up, but since this is pneumatics should I
say hosed up?) It took me years to figure out how to do the circuit analysis
that would let me know for sure it would work on paper before I built it.
I have to sort out one primary question: Can I get both pistons onto one
segment *and* make the connection to the next segment a single joint with two
degrees of freedom, or will I have to have two joints?
The circuitry design is a piece of cake.
Kevin
>
> Mark
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Mark Bellis wrote:
> > I have a plan in mind for a sidewinding snake. It would be composed of 32
> > similar segments, each connected to the next by a pivot with two opposing
> > cylinders driving it. The idea is that there is a main extended flip-flop of 8
> > variables, where each variable of the flip-flop controls every eighth segment,
> > so that four segments do the same thing. The pivots move by +/- 45 degrees
> > relative to the next segment.
> >
> > The snake begins in an M shape, with 'feet' on the underside of the five
> > straight segments in one direction only being on the ground, the other feet
> > being retracted. Feet are only extended when the segment is in the correct
> > orientation and are retracted at other times. They may be driven by small
> > cylinders and don't need to be monitored by switches.
> >
> > It is possible that the opposing cylinder sets will be composed of four
> > cylinders - two set of two cylinders in series, such that when one pair are
> > extended and the other retracted, the two segments will line up straight,
> > However, this would need 128 cylinders and may extend the flip-flop to 16
> > variables, requiring 16 lots of several switches!
> >
> > Once the snake will sidewind, the next challenge is to get its head to keep
> > pointing the same way all the time. I think a car tyre air compressor (set to
> > 25-30psi) is a prerequisite!
> >
> > This'll keep Kevin busy for weeks! :-)
>
> I was presuming that I'd have 6-8 segments, where each segment (except the last)
> has two pistons, and four switches (at least). Given how large inchworm is,
> getting any larger would make it difficult to transport.
>
> Inchworm took me about four hours to come up with a good geometry for a segment,
> then about an hour to replicate all the segments, and an hour to hook up (if
> this were electronics I'd say wired up, but since this is pneumatics should I
> say hosed up?) It took me years to figure out how to do the circuit analysis
> that would let me know for sure it would work on paper before I built it.
>
> I have to sort out one primary question: Can I get both pistons onto one
> segment *and* make the connection to the next segment a single joint with two
> degrees of freedom, or will I have to have two joints?
>
> The circuitry design is a piece of cake.
A sidewinding snake I saw on TV was in an M shape, with effectively two feet on
the ground all the time.
You'll have to synchronise four segments for each advancement of the 16-stage
flip-flop! This is gonna bankrupt you and outstock TLC of excavators! :-)
I suggest that the two segments and a beam all pivot on one axle and that a pair
of cylinders from each segment push the beam. That way the beam can be turned
either way, still allowing the two segments to line up straight.
Mark
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Mark Bellis wrote:
> > > I have a plan in mind for a sidewinding snake. It would be composed of 32
> > > similar segments, each connected to the next by a pivot with two opposing
> > > cylinders driving it. The idea is that there is a main extended flip-flop of 8
> > > variables, where each variable of the flip-flop controls every eighth segment,
> > > so that four segments do the same thing. The pivots move by +/- 45 degrees
> > > relative to the next segment.
> > >
> > > The snake begins in an M shape, with 'feet' on the underside of the five
> > > straight segments in one direction only being on the ground, the other feet
> > > being retracted. Feet are only extended when the segment is in the correct
> > > orientation and are retracted at other times. They may be driven by small
> > > cylinders and don't need to be monitored by switches.
> > >
> > > It is possible that the opposing cylinder sets will be composed of four
> > > cylinders - two set of two cylinders in series, such that when one pair are
> > > extended and the other retracted, the two segments will line up straight,
> > > However, this would need 128 cylinders and may extend the flip-flop to 16
> > > variables, requiring 16 lots of several switches!
> > >
> > > Once the snake will sidewind, the next challenge is to get its head to keep
> > > pointing the same way all the time. I think a car tyre air compressor (set to
> > > 25-30psi) is a prerequisite!
> > >
> > > This'll keep Kevin busy for weeks! :-)
> >
> > I was presuming that I'd have 6-8 segments, where each segment (except the last)
> > has two pistons, and four switches (at least). Given how large inchworm is,
> > getting any larger would make it difficult to transport.
> >
> > Inchworm took me about four hours to come up with a good geometry for a segment,
> > then about an hour to replicate all the segments, and an hour to hook up (if
> > this were electronics I'd say wired up, but since this is pneumatics should I
> > say hosed up?) It took me years to figure out how to do the circuit analysis
> > that would let me know for sure it would work on paper before I built it.
> >
> > I have to sort out one primary question: Can I get both pistons onto one
> > segment *and* make the connection to the next segment a single joint with two
> > degrees of freedom, or will I have to have two joints?
> >
> > The circuitry design is a piece of cake.
>
> A sidewinding snake I saw on TV was in an M shape, with effectively two feet on
> the ground all the time.
>
> You'll have to synchronise four segments for each advancement of the 16-stage
> flip-flop! This is gonna bankrupt you and outstock TLC of excavators! :-)
Well 16 segments means 32 pistons and 64 switches. I have that much easily, but
the bulk of it is in-model in inchworm, quad242 and PHD.
PHD is too expensive to keep around once I get it all hosed together and
working. It has 48 switches in polarity reversors alone.
>
> I suggest that the two segments and a beam all pivot on one axle and that a pair
> of cylinders from each segment push the beam. That way the beam can be turned
> either way, still allowing the two segments to line up straight.
>
> Mark
Kevin
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build, what sorts of ideas would
you like to pursue; ie... what kind of bot would you like to build?
|
-----Snip-----
| |
Or, what would the rest of you like to see us build?
Thoughts?
|
May I put in a request for a set of simple but interesting pneumatic bots that
10-14 year olds could build and in so doing learn about some of the basics of
pneumatics, pneumatic circuits, etc.? Four to six small bots, each getting at
some aspect of pneumatics would be a very positive contribution to those of us
who are teaching the next generation of AFOLs.
Yes, I could probably design these myself, but I’m a teacher not a builder and
there’s nothing good about creating a Rube Goldberg contraption with kids,
watching it break down,and losing the entire conceptual thread of the class.
Here’s a starter. Would someone out there please take Hempel’s motorized pump
design and change it around so that it will accommodate the larger pumps, which
in turn could be used in combination with an RCX to power some pneumatic
apparatus?
I hope you and/or others will accept this challenge and produce some teachable
bots that kids can build and learn from.
Mitch Lichtenberg
| | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Mitchell Lichtenberg wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build, what sorts of ideas would
you like to pursue; ie... what kind of bot would you like to build?
|
-----Snip-----
| |
Or, what would the rest of you like to see us build?
Thoughts?
|
May I put in a request for a set of simple but interesting pneumatic bots
that 10-14 year olds could build and in so doing learn about some of the
basics of pneumatics, pneumatic circuits, etc.? Four to six small bots, each
getting at some aspect of pneumatics would be a very positive contribution to
those of us who are teaching the next generation of AFOLs.
|
I offer this little bot:
http://www.kclague.net/pedmatic/index.htm
and these larger scale bipeds:
http://www.kclague.net/pneumaped/index.htm
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=61523
| |
Yes, I could probably design these myself, but I’m a teacher not a builder
and there’s nothing good about creating a Rube Goldberg contraption with
kids, watching it break down,and losing the entire conceptual thread of the
class.
|
I’d be willing to create building instructions for some of these if you’d like.
I’m close to finishing up documentation for the little one. It is my favorite.
| |
Here’s a starter. Would someone out there please take Hempel’s motorized
pump design and change it around so that it will accommodate the larger
pumps, which in turn could be used in combination with an RCX to power some
pneumatic apparatus?
|
I’m pretty sure that Eric and I are looking at something a bit more gandiose
than the small bots you are describing.
| |
I hope you and/or others will accept this challenge and produce some
teachable bots that kids can build and learn from.
Mitch Lichtenberg
|
Kevin
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build, what sorts of ideas would
you like to pursue; ie... what kind of bot would you like to build?
Scorpion?
Quadra-ped?
Pnuemo Asst’d Arm?
Hexapod?
Cente-Milli-ped?
Or, what would the rest of you like to see us build?
Thoughts?
Come on the King of Pnuematics and the Grand Hebero of Studs getting
together to build somthing? What will we make? What would you like to see?
e
Biomechanical Bricks on LUGNET
|
I’d love to see you make something (probably small, due to pneumatics use)
that’s capable of utilizing the pneumatics to make a walker that actually
moves...
If you go all the way back to Junkyard Wars, season 1--the grand finale of the
show involved two walkers. The losing team had a design that you could do out
of pneumatics (since they used hydraulics)...
Or something that looked cool, but then...touch a button, and all the pneumatics
activate, and the thing transforms into something else...
hm..Spaceball 1 to Mega-Maid? LOL...had to drop a .space dig in somewhere!!
Scott Lyttle
| | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Scott Lyttle wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Kevin, in preparation for our co-build, what sorts of ideas would
you like to pursue; ie... what kind of bot would you like to build?
Scorpion?
Quadra-ped?
Pnuemo Asst’d Arm?
Hexapod?
Cente-Milli-ped?
Or, what would the rest of you like to see us build?
Thoughts?
Come on the King of Pnuematics and the Grand Hebero of Studs getting
together to build somthing? What will we make? What would you like to see?
e
Biomechanical Bricks on LUGNET
|
I’d love to see you make something (probably small, due to pneumatics use)
that’s capable of utilizing the pneumatics to make a walker that actually
moves...
If you go all the way back to Junkyard Wars, season 1--the grand finale of
the show involved two walkers. The losing team had a design that you could
do out of pneumatics (since they used hydraulics)...
Or something that looked cool, but then...touch a button, and all the
pneumatics activate, and the thing transforms into something else...
hm..Spaceball 1 to Mega-Maid? LOL...had to drop a .space dig in somewhere!!
|
Funny you should mention this. As I was waking up the other day, I thought of
making a pneumatic transformer that sequenced itself through the transormations
processes.
Kevin
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
Or, what would the rest of you like to see us build?
Thoughts?
|
Hi Eric,
How about a set of self contained robot legs capable of climbing stairs no
matter what the tread and riser dimensions are. Paul
| | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Paul Krieg wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Or, what would the rest of you like to see us build?
Thoughts?
|
Hi Eric,
How about a set of self contained robot legs capable of climbing stairs no
matter what the tread and riser dimensions are. Paul
|
Interestiung, challanging. Tough. Do-able. Hmm, I have a sort of expanding
ladder type design in my head.
However, we are looking to expand on Kevin’s desire to include his Pneumatic
Circut Logic into an Organic form. Thank you for your idea though, it is
intriguing.
e
| | | | | | | | | | | | | | | | | | | |
| |
|
Re: The Clague - Sophie Project, has now become,
The Clague - Sophie - Hassenplug Combine
Get out your Pen and Paper kiddies, this is gonna be good.
Gents, here is what I propose.
I've been sorting my White and Dark Grey.
I'm itching to make a Scorpion.
I'll work with you both to make this pretty nifty.
I'll rig the mechanics and framework.
Install the pistons, switches, motors and sensors.
RCX and Spybots on hand.
It will require compressors be built in the body somewhere.
You'll be able to do that Kevin. Plus link the pistons and switches in the Arms,
and Tail to a pnuematic nervous system. You can alternate or combine the flow of
air to make the 3 limbs move about in whatever sequence you choose. That is your
Department.
Steve will be posted on what mechanics and hardware is involved.
Preparing you to coordinate Motor and sensor controls Steve. You'll need to
inspect the biometrical range of motion for the Legs and other motor controls.
Correlate the sensors at each joint as you see fit. You'll need to make
suggestions on working with devices such as the Spybots for remote capabilities.
That is your challange, to correlate the devices I'll use to attain the
biomechanics.
Each of us will spend time with the actual model. We must agree to limit the
time we each have the model. So we can shoot for a Brick Fest Demo.
Take heart. I could have a Deca-pod frame in Kevin's hands quick, don't temp me.
Though sadly, money for shipping is my only weak spot. The Lego I can cover.
Perhaps we can come to an arrangement.
Gents. I can produce a Scorpion Frame, loose at the Arms and Tail ready for
pneumatic circut logic to be installed, and with Data and values for sensors,
motors and device port controls. Each of you will work on the model utilizing
your expertise.
Kevin will Pnuemo King it, Steve will coordinate the articulation and sensor
work, I'll flick some SNOT on it to finish it off, and if it doesn't work, Rob
Limbaugh will fix it.
Then when we are done we can send it to Chris Masclet.
;)
I'm gonna go do some scale studies.
e
www.biomechanicalbricks.com
| | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
>
> Then when we are done we can send it to Chris Masclet.
>
> ;)
Hi Eric
Best American builders, no parts quantity limit.... It seems I cannot fight !!
;-)
Chris.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
This will be interesting because it is my first partner build..... and I know of
no pattern to follow. We each have our own approaches and I'm not sure how
similar they are. I figured we might as well do the designing process here on
LUGNET, rather than behind the scenes. If people object, we can take this
conversation offline.
For me, because the pneumatics control plays such a large part, the overall
walking mechanism can have a huge impact on the body design. Now with the
Sophie effect coming into play, we get to consider much more. I like it.
Here is a site that has lots of scorpion pictures. I'll leave it to Eric's
artistic eye to pick the species we're going for.
http://www.ub.ntnu.no/scorpion-files/gallery.php
I start with the overall concept of the walking mechanism..... Inarguably a
scorpion has eight legs, and does not use its own body as a leg, so the body
must stay off the ground during the walking process. I tried unsuccessfully to
find movie clips of scorpions walking, but no lock, so I'll make some
assumptions.
1. Typically they walk forward with two groups of four legs.
2. Turning is done by using a different sweep, primarily with the front two
and back two legs.
If we want to avoid gravity wells, we can use the hex242 circuit with extensions
to support forward and backward movement. We might have to have some special
help for turning (maybe bias the sweep forward or backwards).
The leg sweep will be similar to the way that an oar on a rowboat moves.
Down,back,up,forward.
This requires two pistons (plus two switches each) per leg. One for
forward/backward, and the other for up/down. Each piston has to control two
switches that basically instrument the piston state for the rest of the circuit.
The switches can be anywhere as long as they are mechanically linked to the
expansion and contraction of the piston.
If SSCorpion gets too heavy we can double or triple up pistons for a given
degree of freedon. The multiple pinstons will be mechanically linked so they
all expand at the same rate.
Two groups of four legs is a simple extension to hex242 and hex363.
Scorpion's body looks oval, close to rectangular, so the leg sweeps should be
all about the same mechansim.
The walking mechanism will be completely wired into pneumatics. For walking
backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
The RCX may need to know that we are in the right state before it changes the
muxes, so that will take some kind of sensor.
Other kinds of articulation could include the claw arms, and/or the tail.
The tail is pretty rigid unless a scorpion is threatened, then the scorpion
tries to make itself bug by standing taller, bringing the tail far forward, and
raising its claws. This is not part of the regular walking mechanism, so we'll
have to figure out if this is pneumatic (my guess for now is no.)
I think that we have a lot of freedom as to the shape of the body, so we need to
work on the hip and leg joints and leg structure.
Eric, do you have enough to work up body and leg stuff? My only constraints are
that there are two switches per piston, and two pistons per leg. Feel free to
add more pistons if you think they are needed.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> This will be interesting
-snip-
This is facinating, I am preparing a more in depth response at this moment.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> This will be interesting because it is my first partner build.....
I assume you're not counting the Team Magno fiasco. I guess there really wasn't
much building involved there. :)
> For me, because the pneumatics control plays such a large part, the overall
> walking mechanism can have a huge impact on the body design. Now with the
> Sophie effect coming into play, we get to consider much more. I like it.
...
>
> 1. Typically they walk forward with two groups of four legs.
> 2. Turning is done by using a different sweep, primarily with the front two
> and back two legs.
...
> Two groups of four legs is a simple extension to hex242 and hex363.
Will this type of design allow it to turn in place, or can it only turn while
walking forward/backward?
I think it should be able to turn in place. That could mean dis-connecting the
legs on each side.
Also, moving sideways would be cool. That would mean adding a side-to-side
piston, to go along with the forward/back piston on each leg. Right?
Thoughts?
>
> The walking mechanism will be completely wired into pneumatics. For walking
> backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
> The RCX may need to know that we are in the right state before it changes the
> muxes, so that will take some kind of sensor.
The control could be Motor->pneumatic switch for:
A) Forward/Backward/Stop (x2) (one for each side, as in diff drive)
or
B) Forward/Backward and a second switch for Stop/Go (x2)
or
C) Forward/Backward, Stop/Go, Same/Opposide (legs on both sides go same
direction or opposite direction)
Any thoughts about what works well, Kevin?
> Other kinds of articulation could include the claw arms, and/or the tail.
The claw is a must. As is curling the tail.
But, do the arms move?
As I said, I'd like to see sensors on the arms, somewhat like antenna, so when
it's being autonomous, it can detect objects. And on the front feet, so it can
avoid falling in holes, or walking off tables.
The first challenge I see from our brief discussions, is that Eric builds
backward. :) I think both Kevin and I start from the inside, and build out.
While Eric starts on the outside, and builds in.
I usually worry about how my robot look, but that's secondary to how they work.
This is fun.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > This will be interesting because it is my first partner build.....
>
> I assume you're not counting the Team Magno fiasco. I guess there really wasn't
> much building involved there. :)
>
> > For me, because the pneumatics control plays such a large part, the overall
> > walking mechanism can have a huge impact on the body design. Now with the
> > Sophie effect coming into play, we get to consider much more. I like it.
>
> ...
> >
> > 1. Typically they walk forward with two groups of four legs.
> > 2. Turning is done by using a different sweep, primarily with the front two
> > and back two legs.
With four polarity reversors (16 pneumo switches), we can make it walk
forward, backward, turn right or left. If we used more polarity reversors we
could make one side walk forward, while the other side turns, leading to a
curved walking path.
>
> ...
> > Two groups of four legs is a simple extension to hex242 and hex363.
>
>
> Will this type of design allow it to turn in place, or can it only turn while
> walking forward/backward?
All of the above.
>
> I think it should be able to turn in place. That could mean dis-connecting the
> legs on each side.
Nope, just dilligent reversal of horizontal leg sweep.
>
> Also, moving sideways would be cool. That would mean adding a side-to-side
> piston, to go along with the forward/back piston on each leg. Right?
Yes, I think this would take a third degree of freedom in the legs.
>
> Thoughts?
Plenty of them.
>
>
> >
> > The walking mechanism will be completely wired into pneumatics. For walking
> > backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
> > The RCX may need to know that we are in the right state before it changes the
> > muxes, so that will take some kind of sensor.
>
>
> The control could be Motor->pneumatic switch for:
> A) Forward/Backward/Stop (x2) (one for each side, as in diff drive)
> or
> B) Forward/Backward and a second switch for Stop/Go (x2)
> or
> C) Forward/Backward, Stop/Go, Same/Opposide (legs on both sides go same
> direction or opposite direction)
We have to use polarity reversors in pairs. If we reverse the leg sweep, by
swapping pressure hoses, then we need to swap the AND gate outputs (two
pneumatic switches) also.
For walking backward, we reverse *all* the leg sweeps, and reverse the output of
the sweep complete AND chains. This requires one motor to flip these two
reversors.
For turning, we reverse *half* the leg sweeps, and reverse the AND gate outputs
for the same pistons. We can hose things together so we can use only one
reversor for this. So turning requires one motor to flip these two reversors.
Since you want to stop, you probably want to use a motor and a single pneumo
switch to the *off* position.
>
> Any thoughts about what works well, Kevin?
Yep.
>
>
> > Other kinds of articulation could include the claw arms, and/or the tail.
>
> The claw is a must. As is curling the tail.
>
> But, do the arms move?
>
> As I said, I'd like to see sensors on the arms, somewhat like antenna, so when
> it's being autonomous, it can detect objects. And on the front feet, so it can
> avoid falling in holes, or walking off tables.
>
>
> The first challenge I see from our brief discussions, is that Eric builds
> backward. :) I think both Kevin and I start from the inside, and build out.
> While Eric starts on the outside, and builds in.
>
> I usually worry about how my robot look, but that's secondary to how they work.
Yes, I noticed this too.
I'm going to prototype out some leg designs, but suspect/hope that Eric will
just use these to get started, and will redesign the joints from the outside in.
;^)
>
> This is fun.
>
> Steve
Yes, this is fun!
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > > This will be interesting because it is my first partner build.....
> >
> > > 1. Typically they walk forward with two groups of four legs.
> > > 2. Turning is done by using a different sweep, primarily with the front two
> > > and back two legs.
>
> With four polarity reversors (16 pneumo switches), we can make it walk
> forward, backward, turn right or left. If we used more polarity reversors we
> could make one side walk forward, while the other side turns, leading to a
> curved walking path.
>
> > ...
> > > Two groups of four legs is a simple extension to hex242 and hex363.
> >
> >
> > Will this type of design allow it to turn in place, or can it only turn while
> > walking forward/backward?
>
> All of the above.
>
> >
> > I think it should be able to turn in place. That could mean dis-connecting the
> > legs on each side.
>
> Nope, just dilligent reversal of horizontal leg sweep.
>
> >
> > Also, moving sideways would be cool. That would mean adding a side-to-side
> > piston, to go along with the forward/back piston on each leg. Right?
>
> Yes, I think this would take a third degree of freedom in the legs.
>
> >
> > Thoughts?
>
> Plenty of them.
>
> > >
> > > The walking mechanism will be completely wired into pneumatics. For walking
> > > backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
> > > The RCX may need to know that we are in the right state before it changes the
> > > muxes, so that will take some kind of sensor.
> >
> >
> > The control could be Motor->pneumatic switch for:
> > C) Forward/Backward, Stop/Go, Same/Opposide (legs on both sides go same
> > direction or opposite direction)
>
>
> We have to use polarity reversors in pairs. If we reverse the leg sweep, by
> swapping pressure hoses, then we need to swap the AND gate outputs (two
> pneumatic switches) also.
>
> For walking backward, we reverse *all* the leg sweeps, and reverse the output of
> the sweep complete AND chains. This requires one motor to flip these two
> reversors.
>
> For turning, we reverse *half* the leg sweeps, and reverse the AND gate outputs
> for the same pistons. We can hose things together so we can use only one
> reversor for this. So turning requires one motor to flip these two reversors.
>
> Since you want to stop, you probably want to use a motor and a single pneumo
> switch to the *off* position.
Ok, so I'm thinking about motors to flip pneumo-switches. Each of these may be
one or more switches, all activated at the same time.
1) Switch for Start/Stop (on/off) When this switch is "on" the scorpion will be
walking. (legs going up/down + some other direction). This switch will activate
all eight legs.
2) Switch to select forward or backward for left legs.
3) Switch to select forward or backward for right legs.
4) Switch to select forward/backward OR side-to-side for left legs.
5) Same as 4 for the right legs.
4&5 are optional, depending on if it CAN go sideways.
Is that right for basic operation?
I'm assuming a bank of legs (right or left) can change sweep direction, but they
will still move up/down when ever it's walking.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
> > > > This will be interesting because it is my first partner build.....
> > >
> > > > 1. Typically they walk forward with two groups of four legs.
> > > > 2. Turning is done by using a different sweep, primarily with the front two
> > > > and back two legs.
> >
> > With four polarity reversors (16 pneumo switches), we can make it walk
> > forward, backward, turn right or left. If we used more polarity reversors we
> > could make one side walk forward, while the other side turns, leading to a
> > curved walking path.
> >
> > > ...
> > > > Two groups of four legs is a simple extension to hex242 and hex363.
> > >
> > >
> > > Will this type of design allow it to turn in place, or can it only turn while
> > > walking forward/backward?
> >
> > All of the above.
> >
> > >
> > > I think it should be able to turn in place. That could mean dis-connecting the
> > > legs on each side.
> >
> > Nope, just dilligent reversal of horizontal leg sweep.
> >
> > >
> > > Also, moving sideways would be cool. That would mean adding a side-to-side
> > > piston, to go along with the forward/back piston on each leg. Right?
> >
> > Yes, I think this would take a third degree of freedom in the legs.
> >
> > >
> > > Thoughts?
> >
> > Plenty of them.
> >
> > > >
> > > > The walking mechanism will be completely wired into pneumatics. For walking
> > > > backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
> > > > The RCX may need to know that we are in the right state before it changes the
> > > > muxes, so that will take some kind of sensor.
> > >
> > >
> > > The control could be Motor->pneumatic switch for:
> > > C) Forward/Backward, Stop/Go, Same/Opposide (legs on both sides go same
> > > direction or opposite direction)
> >
> >
> > We have to use polarity reversors in pairs. If we reverse the leg sweep, by
> > swapping pressure hoses, then we need to swap the AND gate outputs (two
> > pneumatic switches) also.
> >
> > For walking backward, we reverse *all* the leg sweeps, and reverse the output of
> > the sweep complete AND chains. This requires one motor to flip these two
> > reversors.
> >
> > For turning, we reverse *half* the leg sweeps, and reverse the AND gate outputs
> > for the same pistons. We can hose things together so we can use only one
> > reversor for this. So turning requires one motor to flip these two reversors.
> >
> > Since you want to stop, you probably want to use a motor and a single pneumo
> > switch to the *off* position.
>
>
>
> Ok, so I'm thinking about motors to flip pneumo-switches. Each of these may be
> one or more switches, all activated at the same time.
>
> 1) Switch for Start/Stop (on/off) When this switch is "on" the scorpion will be
> walking. (legs going up/down + some other direction). This switch will activate
> all eight legs.
Yes.
>
> 2) Switch to select forward or backward for left legs.
No.
>
> 3) Switch to select forward or backward for right legs.
No
>
> 4) Switch to select forward/backward OR side-to-side for left legs.
>
> 5) Same as 4 for the right legs.
>
> 4&5 are optional, depending on if it CAN go sideways.
No.
Ignoring side walking for a moment.....
1) One motor to turn a single switch on/off. This allows or prevents walking.
2) One motor to flip 8 switches. This one controls walking vs. turning.
3) One motor to flip 8 switches. When walking, this one controls forward vs.
backwards. When tuning (in place), this one controls right vs. left turning.
I see no reason to turn off one side or the other, when we already have a
mechanism that will turn in place.
If we wanted to get fancier, we could add two more sets of controls so that one
set of four legs can walk forward/backard or turn right/left, while the other
set of legs can walk forward/backward or turn right/left.
With seperate leg group controls we could have it walk in a curved path by
having one leg group (four legs) turning, while the other leg group is walking.
You might want to study this:
http://www.kclague.net/Quad242/index.htm
In particular the movies of walking/turning to see what I have in mind.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> Ignoring side walking for a moment.....
>
> 1) One motor to turn a single switch on/off. This allows or prevents walking.
>
> 2) One motor to flip 8 switches. This one controls walking vs. turning.
>
> 3) One motor to flip 8 switches. When walking, this one controls forward vs.
> backwards. When tuning (in place), this one controls right vs. left turning.
That was my second choice.
Ok, three motors.
If it can be worked out, we COULD combine #1 and #3, right?
Leaving:
1) Function (walk/turn)
2) Direction (forward/backward/stop)
I assume both of these groups are controlled only by motors, and at no time are
they moved by pistons.
I still think walking sideways is cool, but optional.
> I see no reason to turn off one side or the other, when we already have a
> mechanism that will turn in place.
Right.
>
> You might want to study this:
>
> http://www.kclague.net/Quad242/index.htm
looks good. But slow.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Ignoring side walking for a moment.....
> >
> > 1) One motor to turn a single switch on/off. This allows or prevents walking.
> >
> > 2) One motor to flip 8 switches. This one controls walking vs. turning.
> >
> > 3) One motor to flip 8 switches. When walking, this one controls forward vs.
> > backwards. When tuning (in place), this one controls right vs. left turning.
>
>
> That was my second choice.
>
> Ok, three motors.
>
> If it can be worked out, we COULD combine #1 and #3, right?
Nope, but we could just eliminate #1 by just turning of the compressors.
> Leaving:
> 1) Function (walk/turn)
> 2) Direction (forward/backward/stop)
>
> I assume both of these groups are controlled only by motors, and at no time are
> they moved by pistons.
>
>
> I still think walking sideways is cool, but optional.
It is still on the list, I was just leaving it out of the equation for a moment.
>
>
> > I see no reason to turn off one side or the other, when we already have a
> > mechanism that will turn in place.
>
> Right.
>
> >
> > You might want to study this:
> >
> > http://www.kclague.net/Quad242/index.htm
>
>
> looks good. But slow.
Yes, slow, more pressure, or more force. Shall I assume four pistons per leg?
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > > You might want to study this:
> > >
> > > http://www.kclague.net/Quad242/index.htm
> >
> >
> > looks good. But slow.
>
> Yes, slow, more pressure, or more force. Shall I assume four pistons per leg?
That's up to you. I'd like to see it move as fast as possible, but I think even
if we make it as small as possible, it's going to weigh at least 10 pounds. 3
or 4 pounds will be the RCXs, battey box, Spybot, and motors.
So, what will it take to move that?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
> > > > You might want to study this:
> > > >
> > > > http://www.kclague.net/Quad242/index.htm
> > >
> > >
> > > looks good. But slow.
> >
> > Yes, slow, more pressure, or more force. Shall I assume four pistons per leg?
>
>
>
> That's up to you. I'd like to see it move as fast as possible, but I think even
> if we make it as small as possible, it's going to weigh at least 10 pounds. 3
> or 4 pounds will be the RCXs, battey box, Spybot, and motors.
>
> So, what will it take to move that?
Hmmmm.... interesting question.
I don't know much pneumatic theory, but.....
Pressure is in pounds per square inch. So if we know the area of the face of a
piston, and we know the pressure we can determine how many pounds a single
piston can lift.
Force = Pressure * Area
A pneumatic piston face is about a half an inch in diameter. The area then is
pi times diameter, or about 1.6. Four pistons then have the combined area of
6.4.
So the minimal pressure needed is 10 pounds / 6.4 sq inch = 1.5 pounds/square
inch. Unless my math is wrong (and it could be) four large pistons should be
easily able to lift 10 pounds within the upper limit of 32 PSI inherent in LEGO
pneumatics.
One nice thing is that the vertical pistons do not have to *lift* the body,
because the body always stays the same distance off the ground. So the speed at
which legs the legs lift and drop is simply related to the speed at which the
pistons can expand/contract, combined with the resistance provided by the two
switches the piston flips. If the resistance provided by the switches causes a
big slow down in piston expansion, then doubling the pistons will reduce the
expansion time. If the switches don't slow things down much, adding a second
piston won't help much. I'll have to test this.
Pistons expansion/contraction rate depends on inherent resistance and pressure.
The way I control the pneumatics, when multiple pistons are
expanding/contracting at the same time I make sure that all have completed their
change before the next change starts. This means that the slowest pistons
control the rate. This is intentional to make sure that they all stay
coordinated.
I'll try to make sure my leg/hip design does not slow piston
expansion/contraction.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> Pressure is in pounds per square inch. So if we know the area of the face of a
> piston, and we know the pressure we can determine how many pounds a single
> piston can lift.
>
> Force = Pressure * Area
>
> A pneumatic piston face is about a half an inch in diameter. The area then is
> pi times diameter, or about 1.6. Four pistons then have the combined area of
> 6.4.
Mark Riley was nice enought to point out the errors in my math. The area of the
piston care is pi * r^2 = 0.2
Four times that is 0.8.
So the minimal pressure needed is 10 pounds / 0.8 square inches or, 12.5 pounds
per square inch. Still well below the 32 PSI upper limit for LEGO pneumatics.
The next question is, how easy is it to get to 13 PSI with LEGO based
compressors.
If we double the number of pistons, we'd only need to get to 6 PSI, but will
this really make much difference on piston transition time.
The pistons that do the most work (force through a distance) are the horizontal
pistons. They actually make the distance term non-zero.
Back to compressors for a second...... There has always been this debate about
which pumps are better, small pumps or large pumps. Small pumps provide less
piston face are than larger pumps, and can drive the pressure in a closed system
to max pressure quicker than the large pumps (even with spring removed)... but a
pneumatic sequencer (motor for example) is not a closed system. It is always
releasing pressure when the pistons are switching direction. A second test that
measures the RPM of a pneumatic engine (motor?) using a small pump vs. a large
pump showed that the large pump did better.
One of the issued with large pumps is that they are large... large enough to
affect the minimum scale of a compressor, and therefore the creation being
made......
I'd like us to make Scorpion completely out of LEGO parts. I'm not a full time
purist, but typically this is my goal so that others can make copies. I guess
also that I'd like to make it out of currently available parts. This rules out
the use of the original single ported pistons. Unfortunatly this also rules out
the use of:
http://www.bricklink.com/catalogItemPic.asp?P=4692
Using two of these and a double ported piston would give us a double acting
pump, instead of the single action pumps lego makes. Presumably this would
reduce the inherent amount of friction in the compressor.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
>
>
> The next question is, how easy is it to get to 13 PSI with LEGO based
> compressors. • ...
>
> If we double the number of pistons, we'd only need to get to 6 PSI, but will
> this really make much difference on piston transition time.
With twice the pistons, the pressure is not as great, but the volume of air
would be doubled, right?
Using logic, not physics, I think once the pressure is built up (to 13 psi) the
compressor may have to do less work to keep it there, than to maintain twice the
volume, at 6 psi.
Or, it's the same amount of work. But I doubt it will be less work on the
compressor to maintain the 6 psi with twice the pistons.
>
> I'd like us to make Scorpion completely out of LEGO parts. I'm not a full time
> purist, but typically this is my goal so that others can make copies. I guess
> also that I'd like to make it out of currently available parts. This rules out
> the use of the original single ported pistons. Unfortunatly this also rules out
> the use of:
I agree with trying to use LEGO parts (as a goal), but I'm not sure about
limiting to currently available parts. I mean, do you REALLY think anyone would
try to replicate this? :)
And, if they do, the parts are available on Bricklink, right?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
<snip>
> I agree with trying to use LEGO parts (as a goal), but I'm not sure about
> limiting to currently available parts. I mean, do you REALLY think anyone would
> try to replicate this? :)
>
> And, if they do, the parts are available on Bricklink, right?
Well, I know of situations where LEGO has asked some people to recreate their
MOCs for them. You know you have arrived if that happens.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Kevin L. Clague wrote:
>
> > Pressure is in pounds per square inch. So if we know the area of the face of a
> > piston, and we know the pressure we can determine how many pounds a single
> > piston can lift.
> >
> > Force = Pressure * Area
> >
> > A pneumatic piston face is about a half an inch in diameter. The area then is
> > pi times diameter, or about 1.6. Four pistons then have the combined area of
> > 6.4.
>
>
> Mark Riley was nice enought to point out the errors in my math. The area of the
> piston care is pi * r^2 = 0.2
>
> Four times that is 0.8.
>
> So the minimal pressure needed is 10 pounds / 0.8 square inches or, 12.5 pounds
> per square inch. Still well below the 32 PSI upper limit for LEGO pneumatics.
>
> The next question is, how easy is it to get to 13 PSI with LEGO based
> compressors.
>
> If we double the number of pistons, we'd only need to get to 6 PSI, but will
> this really make much difference on piston transition time.
>
> The pistons that do the most work (force through a distance) are the horizontal
> pistons. They actually make the distance term non-zero.
>
> Back to compressors for a second...... There has always been this debate about
> which pumps are better, small pumps or large pumps. Small pumps provide less
> piston face are than larger pumps, and can drive the pressure in a closed system
> to max pressure quicker than the large pumps (even with spring removed)... but a
> pneumatic sequencer (motor for example) is not a closed system. It is always
> releasing pressure when the pistons are switching direction. A second test that
> measures the RPM of a pneumatic engine (motor?) using a small pump vs. a large
> pump showed that the large pump did better.
>
> One of the issued with large pumps is that they are large... large enough to
> affect the minimum scale of a compressor, and therefore the creation being
> made......
>
> I'd like us to make Scorpion completely out of LEGO parts. I'm not a full time
> purist, but typically this is my goal so that others can make copies. I guess
> also that I'd like to make it out of currently available parts. This rules out
> the use of the original single ported pistons. Unfortunatly this also rules out
> the use of:
>
> http://www.bricklink.com/catalogItemPic.asp?P=4692
>
> Using two of these and a double ported piston would give us a double acting
> pump, instead of the single action pumps lego makes. Presumably this would
> reduce the inherent amount of friction in the compressor.
>
> Kevin
A few things spring to mind about this:
1. I usually run robots from a car tyre air compressor at 25PSI. This gives
good performance with 1-2 large cylinders moving at a time. Using 6 large pump
cylinders as the air source, performance is half as good, probably around 13psi,
which is what you're aiming for. I suggest that 6 large pump cylinders with
springs removed might provide enough air.
2. However, the model will have to support its own weight without a gravity well
(due to losing pressure in supporting leg cylinders when other cylinders use the
air in the pipes). You'll have to either increase the source pressure so that
the minimum pressure stays above about 10psi (gaining a bit of leeway for the
friction helping to prevent movement) or put more isolation logic in place on
each leg supporting cylinder.
3. The model is going to walk, so the force on each leg is potentially a dynamic
one, if it walks fast enough. When you jump repeatedly, the force on your legs
is not equal to your weight, but significantly more - at least double, depending
on how fast you jump. Therefore the load on the legs will be at least twice the
weight of the robot divided by the number of legs that stay on the ground when a
step is taken.
Since you're going for a completely current Lego parts solution, that rules out
my 2-mini-compressors-driven-by-a-12-volt-train-motor solution. The most
powerful motors you've got are the 8475 RC buggy ones with the red plugs on.
They'll use 7.2W of electrical power but put out 2.38W each.
See http://www.philohome.com/motors/motorcomp.htm
I suggest you make a trial compressor engine using a pair of 8475 RC buggy
motors geared down and four pump cylinders with springs removed, with cranks
offset at each 90 degree angle. Offsetting the pumps by 90 degrees should make
the load on the motors smoother. The engine will need to be very strong due to
the torque required. I suggest two shafts geared together, supported by double
width beams throughout. Use 40 tooth cogs to make the cranks as they're more
sturdy than other crank parts and will allow you to gear the two shafts together
easily.
Provided the non-return valves in the pump cylinders are good, you only need to
use T-junctions to connect them together. I suggest an initial shaft speed of
1rev/second. That said, using 6 pump cylinders in my hands I pump them at a
rate of 1 pump/second, which is 6 cylinders of air/second. The engine will do
just 4, but see how well it works with the amount of motor power. You might
need several engines!
Just a thought - what's the mechanical load required to compress a large pump
cylinder at 25psi? That's the load the motors have to cope with. You could
measure the volume of a pump cylinder by using a graded syringe to collect the
air.
Overall, the load on the compressor engine will be greater than the load on the
legs, since the system can't be 100% efficient. My car tyre air compressor
needs 6 Amps at 12 Volts, so 72 Watts - that's ten RC buggy motors or 5 engines!
This is getting expensive! Surely a £20 compressor and 12V 6Ah lead acid
battery are fair game? I abandoned Lego controllers for my railway in favour of
a large PSU as soon as I got beyond 2 train motors!
Mark
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> A few things spring to mind about this:
>
> 3. The model is going to walk, so the force on each leg is potentially a dynamic
> one, if it walks fast enough. When you jump repeatedly, the force on your legs
> is not equal to your weight, but significantly more - at least double,
That makes sense, but you may want to take a look at the video of Kevin's
walkers:
http://www.kclague.net/Quad242/q242-forward.mpg
As you see, at the end of each stride, all four legs are at the bottom of their
travel. So while it is true that half the legs will have to support all the
weight, I don't think the force on the legs will ever be above the weight of the
walker.
It's pretty cool the way it walks. I'm not exactly sure what it's doing, it
must be some kind of black magic...
> I suggest you make a trial compressor engine using a pair of 8475 RC buggy
> motors geared down and four pump cylinders with springs removed, with cranks
> offset at each 90 degree angle. Offsetting the pumps by 90 degrees should make
> the load on the motors smoother. The engine will need to be very strong due to
> the torque required. I suggest two shafts geared together, supported by double
> width beams throughout. Use 40 tooth cogs to make the cranks as they're more
> sturdy than other crank parts and will allow you to gear the two shafts together
> easily.
Yes, Kevin was just talking about using beams for strength throughout the model,
instead of the lighter liftarms he often uses.
I'm hoping he has some experience with compressors. If not, I'll have to throw
together something using the buggy motors. Thanks for the idea.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Mark Bellis wrote:
> > A few things spring to mind about this:
> >
> > 3. The model is going to walk, so the force on each leg is potentially a dynamic
> > one, if it walks fast enough. When you jump repeatedly, the force on your legs
> > is not equal to your weight, but significantly more - at least double,
>
>
> That makes sense, but you may want to take a look at the video of Kevin's
> walkers:
>
> http://www.kclague.net/Quad242/q242-forward.mpg
>
> As you see, at the end of each stride, all four legs are at the bottom of their
> travel. So while it is true that half the legs will have to support all the
> weight, I don't think the force on the legs will ever be above the weight of the
> walker.
>
> It's pretty cool the way it walks. I'm not exactly sure what it's doing, it
> must be some kind of black magic...
Funny! My presentation at Brickest (classic?) was named Pneumatic Magic.
When I started on quad242 I thought the cool thing was going to be the ability
to make it modify its behavior to go backwards and turn, but the hardest part
was the "no gravity well" concept you point out above Steve.
> > I suggest you make a trial compressor engine using a pair of 8475 RC buggy
> > motors geared down and four pump cylinders with springs removed, with cranks
> > offset at each 90 degree angle. Offsetting the pumps by 90 degrees should make
> > the load on the motors smoother. The engine will need to be very strong due to
> > the torque required. I suggest two shafts geared together, supported by double
> > width beams throughout. Use 40 tooth cogs to make the cranks as they're more
> > sturdy than other crank parts and will allow you to gear the two shafts together
> > easily.
>
>
>
> Yes, Kevin was just talking about using beams for strength throughout the model,
> instead of the lighter liftarms he often uses.
>
> I'm hoping he has some experience with compressors. If not, I'll have to throw
> together something using the buggy motors. Thanks for the idea.
I have some experience with compressors.
I've worked out a perfect geometry for large pumps so that they can be pumped by
a motor and use the entire piston head travel range. This was one of those holy
grail kinds of things.
There has been a long standing debate about which are better small pumps vs.
large pumps. C.S. Soh is set on small pumps, and he actively scorns those who
use them (well at least me anyway.) I've seen good arguments for large pumps
also.
If we go with four pistons per leg (more volume with less pressure), I for sure
think that large pumps are the way to go. It is hard to acheive high pressure
with LEGO pneumatics, but it is not nearly as hard to get the volume up. I'm
still pondering the 2 vs. 4 scenario.
I've got a pretty strong 2 piston hip/leg assembly going. The hip pivot is very
sturdy (one of the weak points on hex363, but the linkage from that to the leg
piston is pretty weak.
Here is are some pics.
http://www.kclague.net/SSCorpion/P4130047.JPG
http://www.kclague.net/SSCorpion/P4130048.JPG
http://www.kclague.net/SSCorpion/P4130045.JPG
http://www.kclague.net/SSCorpion/P4130046.JPG
http://www.kclague.net/SSCorpion/P4130049.JPG
The force of the sweep is effectively transfered through the hip joint, but the
force is then transferred to the leg through the leg piston and the leg
switches. Don't think the 3x5 quarter oval and switch handles are strong enough
to transfer the sweep force.
Kevin
>
> Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Mark Bellis wrote:
> > > A few things spring to mind about this:
> > >
> > > 3. The model is going to walk, so the force on each leg is potentially a dynamic
> > > one, if it walks fast enough. When you jump repeatedly, the force on your legs
> > > is not equal to your weight, but significantly more - at least double,
> >
> >
> > That makes sense, but you may want to take a look at the video of Kevin's
> > walkers:
> >
> > http://www.kclague.net/Quad242/q242-forward.mpg
> >
> > As you see, at the end of each stride, all four legs are at the bottom of their
> > travel. So while it is true that half the legs will have to support all the
> > weight, I don't think the force on the legs will ever be above the weight of the
> > walker.
> >
> > It's pretty cool the way it walks. I'm not exactly sure what it's doing, it
> > must be some kind of black magic...
>
> Funny! My presentation at Brickest (classic?) was named Pneumatic Magic.
>
> When I started on quad242 I thought the cool thing was going to be the ability
> to make it modify its behavior to go backwards and turn, but the hardest part
> was the "no gravity well" concept you point out above Steve.
>
> > > I suggest you make a trial compressor engine using a pair of 8475 RC buggy
> > > motors geared down and four pump cylinders with springs removed, with cranks
> > > offset at each 90 degree angle. Offsetting the pumps by 90 degrees should make
> > > the load on the motors smoother. The engine will need to be very strong due to
> > > the torque required. I suggest two shafts geared together, supported by double
> > > width beams throughout. Use 40 tooth cogs to make the cranks as they're more
> > > sturdy than other crank parts and will allow you to gear the two shafts together
> > > easily.
> >
> >
> >
> > Yes, Kevin was just talking about using beams for strength throughout the model,
> > instead of the lighter liftarms he often uses.
> >
> > I'm hoping he has some experience with compressors. If not, I'll have to throw
> > together something using the buggy motors. Thanks for the idea.
>
> I have some experience with compressors.
>
> I've worked out a perfect geometry for large pumps so that they can be pumped by
> a motor and use the entire piston head travel range. This was one of those holy
> grail kinds of things.
>
> There has been a long standing debate about which are better small pumps vs.
> large pumps. C.S. Soh is set on small pumps, and he actively scorns those who
> use them (well at least me anyway.) I've seen good arguments for large pumps
> also.
>
> If we go with four pistons per leg (more volume with less pressure), I for sure
> think that large pumps are the way to go. It is hard to acheive high pressure
> with LEGO pneumatics, but it is not nearly as hard to get the volume up. I'm
> still pondering the 2 vs. 4 scenario.
>
> I've got a pretty strong 2 piston hip/leg assembly going. The hip pivot is very
> sturdy (one of the weak points on hex363, but the linkage from that to the leg
> piston is pretty weak.
>
> Here is are some pics.
>
> http://www.kclague.net/SSCorpion/P4130047.JPG
> http://www.kclague.net/SSCorpion/P4130048.JPG
>
> http://www.kclague.net/SSCorpion/P4130045.JPG
> http://www.kclague.net/SSCorpion/P4130046.JPG
> http://www.kclague.net/SSCorpion/P4130049.JPG
>
> The force of the sweep is effectively transfered through the hip joint, but the
> force is then transferred to the leg through the leg piston and the leg
> switches. Don't think the 3x5 quarter oval and switch handles are strong enough
> to transfer the sweep force.
>
> Kevin
I can see the good sense in putting the hip switches on their own sets of
levers, as your pics show. That way, the force required for them and for the
legs is independent, so there's no extra load on the switches. I am used to
mounting the switches all in a line on the chassis, especially if there are more
than two.
Have you seen this compressor and regulator (near the bottom of the page)?:
http://www.genuinemodels.com/jcb.htm
This compressor has the pumps at 90 degrees offset by using a V-engine
orientation. It uses 71427 or 43362 motors, which are widely available, and a
good gear ratio has already been achieved. You could crib the design if you use
small compressors or uprate it for large ones, with lower gearing.
You might also see some nice techniques used in the control panel.
(Wow! I wrote less than a page on pneumatics for once!)
Mark
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > >
> > > Ignoring side walking for a moment.....
> > >
> > > 1) One motor to turn a single switch on/off. This allows or prevents walking.
> > >
> > > 2) One motor to flip 8 switches. This one controls walking vs. turning.
> > >
> > > 3) One motor to flip 8 switches. When walking, this one controls forward vs.
> > > backwards. When tuning (in place), this one controls right vs. left turning.
> >
> >
> > That was my second choice.
> >
> > Ok, three motors.
> >
> >
> > I still think walking sideways is cool, but optional.
>
> It is still on the list, I was just leaving it out of the equation for a moment.
Ok, so what's required for walking sideways? One switch (= single set of
switches, all activated at once) to switch from forward/back/turn to
side-to-side? I'm sure that comes to about 16 reverser switches, or something.
:)
I just happened to think, the legs should be in a known position when switching
from forward/back to side-to-side.
Do the legs need to be in a know position when switching from forward to
backward? Or walking to turning? If so, we need sensors for that...
Here's my current bill of materials:
1 Spybot, for IR direction control. This is mostly used as a sensor.
2 RCXs. I really haven't counted I/O, but two sounds like enough.
1 Battery box for compressor(s)
All those should be installed in the body of the beast. The Spybot/RCXs will
need to communicate via IR. (there are other options, but we'll start there)
The Spybot has two motors, but very limited sensor feedback. It would be good
to use the Spybot motors to activate something like claws (open & close), where
it won't be critical if they work exactly right. We can use the Spybot remote
to send it commands, like "follow me" or "attack anything in front of you"
All the outputs from 1 RCX control movement. 1=Activate, 2=function
(turn/straight), 3=forward/backward
Two inputs would be used for sensing the edge-of-table. That's one input for
each front leg. Each leg would have one sensor to detect when the leg is in
it's "down" position, and one sensor to detect the ground. The two sensors in
each leg can be connected together, to use one input. This could be two touch
sensors, or a touch+light sensor combination.
Two inputs can be used for the arm "feelers". Maybe several touch sensors per
arm, or one rotation sensor for each.
I'm not sure the RCXs really need to "know" when the SSClagorpion is actually
walking. It can assume if it runs the motors, then the switches are set, and it
is going.
Beyond that, there is one motor to set the switch for curling the tail.
That leaves 2 motor outputs, and 2 sensor inputs, for further expansion. Plus a
touch sensor & light sensor built into the Spybot. The outputs from the second
RCX can be connected to a gearbox, like Eric was suggesting, if we want to
control more things, but I think that may just make things more complex than
they need to be.
It would be nice to mount the Spybot in the end of the tail, but it needs to
communicate with the RCXs via IR, so I don't think that will work well, unless
we connect a fiber-optic line. No, I don't think that will work, either.
So, SSClagorpion will walk forward & backward, turn right & left, open & close
two claws, and move it's tail. It can stay on a table/stage, detect when it
bumps into something (going forward), follow the "controller" or be driven
around like an RC car.
Is that enough cool functionality?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
> > > >
> > > > Ignoring side walking for a moment.....
> > > >
> > > > 1) One motor to turn a single switch on/off. This allows or prevents walking.
> > > >
> > > > 2) One motor to flip 8 switches. This one controls walking vs. turning.
> > > >
> > > > 3) One motor to flip 8 switches. When walking, this one controls forward vs.
> > > > backwards. When tuning (in place), this one controls right vs. left turning.
> > >
> > >
> > > That was my second choice.
> > >
> > > Ok, three motors.
> > >
> > >
> > > I still think walking sideways is cool, but optional.
> >
> > It is still on the list, I was just leaving it out of the equation for a moment.
>
>
> Ok, so what's required for walking sideways? One switch (= single set of
> switches, all activated at once) to switch from forward/back/turn to
> side-to-side? I'm sure that comes to about 16 reverser switches, or something.
> :)
It is my belief that sideways walking will require a third degree of
articulation in the leg/hip structure. It will cause the legs to swing towards
and away from the body. By replacing the forward/backward part of the leg sweep
with the side to side leg sweep we should be able to walk.
I'd guess 16 also..... We'd need 8 to swap the side to side motions for the
forward back sweep, this gives us one direction of side walking. We'd need
another 8 to swap the direction sweep so that we can walk toward the other side.
Looks like the sideways muxes will need a motor. We can probably use the
forward/backward motor to also control the right/left muxes as well.
>
> I just happened to think, the legs should be in a known position when switching
> from forward/back to side-to-side.
>
> Do the legs need to be in a know position when switching from forward to
> backward? Or walking to turning? If so, we need sensors for that...
Yes. Changing the forward/backward/turning muxes needs to be done when the feet
are in the air. Observing any one foot is probably sufficient.
The above costs us four motors, and one sensor.
>
>
> Here's my current bill of materials:
> 1 Spybot, for IR direction control. This is mostly used as a sensor.
> 2 RCXs. I really haven't counted I/O, but two sounds like enough.
> 1 Battery box for compressor(s)
>
> All those should be installed in the body of the beast. The Spybot/RCXs will
> need to communicate via IR. (there are other options, but we'll start there)
>
> The Spybot has two motors, but very limited sensor feedback. It would be good
> to use the Spybot motors to activate something like claws (open & close), where
> it won't be critical if they work exactly right. We can use the Spybot remote
> to send it commands, like "follow me" or "attack anything in front of you"
>
> All the outputs from 1 RCX control movement. 1=Activate, 2=function
> (turn/straight), 3=forward/backward
Until you try side to side walking.
>
> Two inputs would be used for sensing the edge-of-table. That's one input for
> each front leg. Each leg would have one sensor to detect when the leg is in
> it's "down" position, and one sensor to detect the ground. The two sensors in
> each leg can be connected together, to use one input. This could be two touch
> sensors, or a touch+light sensor combination.
>
> Two inputs can be used for the arm "feelers". Maybe several touch sensors per
> arm, or one rotation sensor for each.
>
>
> I'm not sure the RCXs really need to "know" when the SSClagorpion is actually
> walking. It can assume if it runs the motors, then the switches are set, and it
> is going.
Yes, I think it can assume that if it has set the switches correctly it is
walking.
>
> Beyond that, there is one motor to set the switch for curling the tail.
>
> That leaves 2 motor outputs, and 2 sensor inputs, for further expansion. Plus a
> touch sensor & light sensor built into the Spybot. The outputs from the second
> RCX can be connected to a gearbox, like Eric was suggesting, if we want to
> control more things, but I think that may just make things more complex than
> they need to be.
>
>
> It would be nice to mount the Spybot in the end of the tail, but it needs to
> communicate with the RCXs via IR, so I don't think that will work well, unless
> we connect a fiber-optic line. No, I don't think that will work, either.
>
>
> So, SSClagorpion will walk forward & backward, turn right & left, open & close
> two claws, and move it's tail. It can stay on a table/stage, detect when it
> bumps into something (going forward), follow the "controller" or be driven
> around like an RC car.
>
> Is that enough cool functionality?
It works for me!
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > Ok, so what's required for walking sideways?
> > I just happened to think, the legs should be in a known position when switching
> > from forward/back to side-to-side.
> >
> > Do the legs need to be in a know position when switching from forward to
> > backward? Or walking to turning? If so, we need sensors for that...
>
> Yes. Changing the forward/backward/turning muxes needs to be done when the feet
> are in the air. Observing any one foot is probably sufficient.
>
> The above costs us four motors, and one sensor.
Ok, we [plan to] have a sensor on the front foot, and can detect when that is
down. So, no more sensors are required.
So you said, the forward/backward must be changed while the feet are in the air.
We've been thinking of having a touch sensor on the front feet, so it can detect
when it goes off an edge (like a table). However, it would not know the surface
is not there, until it trys to put the foot down. So, all the feet would be
down, and it needs to backup. Can it do that? Or will it need to keep walking
a bit?
Overall, I THINK that just adds one motor to my previous list:
1) Activate (move!)
2) Direction (forward/back, turn right/left, slide right/left)
3a) Function 1 (walk or turn)
3b) Function 2 (function 1 or slide)
> > So, SSClagorpion will walk forward & backward, turn right & left,
step right & left
> > open & close
> > two claws, and move it's tail. It can stay on a table/stage, detect when it
> > bumps into something (going forward), follow the "controller" or be driven
> > around like an RC car.
> >
> > Is that enough cool functionality?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > Ok, so what's required for walking sideways?
> > > I just happened to think, the legs should be in a known position when switching
> > > from forward/back to side-to-side.
> > >
> > > Do the legs need to be in a know position when switching from forward to
> > > backward? Or walking to turning? If so, we need sensors for that...
> >
> > Yes. Changing the forward/backward/turning muxes needs to be done when the feet
> > are in the air. Observing any one foot is probably sufficient.
> >
> > The above costs us four motors, and one sensor.
>
> Ok, we [plan to] have a sensor on the front foot, and can detect when that is
> down. So, no more sensors are required.
Actualy we need to sense when it is *up*.
>
> So you said, the forward/backward must be changed while the feet are in the air.
> We've been thinking of having a touch sensor on the front feet, so it can detect
> when it goes off an edge (like a table). However, it would not know the surface
> is not there, until it trys to put the foot down. So, all the feet would be
> down, and it needs to backup. Can it do that? Or will it need to keep walking
> a bit?
As soon as you figure out that a foot is up, you can reverse directions. I'll
have to study the state sequence, because there are two non-weight bearing
pistons that control the feet, so it might be sufficient to see that they are
telling the feet to lift. You might need two touch sensors wire-ORed together
(one for each leg group).
>
> Overall, I THINK that just adds one motor to my previous list:
> 1) Activate (move!)
> 2) Direction (forward/back, turn right/left, slide right/left)
> 3a) Function 1 (walk or turn)
> 3b) Function 2 (function 1 or slide)
I think so too.
>
> > > So, SSClagorpion will walk forward & backward, turn right & left,
>
> step right & left
>
> > > open & close
> > > two claws, and move it's tail. It can stay on a table/stage, detect when it
> > > bumps into something (going forward), follow the "controller" or be driven
> > > around like an RC car.
> > >
> > > Is that enough cool functionality?
>
>
>
> Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > Ok, we [plan to] have a sensor on the front foot, and can detect when that is
> > down. So, no more sensors are required.
>
> Actualy we need to sense when it is *up*.
Is *up* the same as "not down"? I was thinking it was, but that may not be the
case.
> >
> > So you said, the forward/backward must be changed while the feet are in the air.
> > We've been thinking of having a touch sensor on the front feet, so it can detect
> > when it goes off an edge (like a table). However, it would not know the surface
> > is not there, until it trys to put the foot down. So, all the feet would be
> > down, and it needs to backup. Can it do that? Or will it need to keep walking
> > a bit?
>
> As soon as you figure out that a foot is up, you can reverse directions. I'll
> have to study the state sequence, because there are two non-weight bearing
> pistons that control the feet, so it might be sufficient to see that they are
> telling the feet to lift. You might need two touch sensors wire-ORed together
> (one for each leg group).
This sounds like we can NOT do the table edge detection stuff, using it's feet.
Imagine you're crawling around on your hands and knees, with your eyes closed.
When you get to the top of a stairway, you put your hand down, and it doesn't
touch the ground.
If I understand you correctly (which doesn't always happen via e-mail) you must
continue to crawl forward, until your other hand and knee are off the ground.
That will be a problem.
It's fine if it can't turn, or switch to moving sideways while all feet are on
the ground, but it really needs to be able to reverse direction.
I suspect the front legs can be a small amount longer, so it will detect the
lack of ground, before the weight is really shifted to the new legs.
Will that work?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > >
> > > Ok, we [plan to] have a sensor on the front foot, and can detect when that is
> > > down. So, no more sensors are required.
> >
> > Actualy we need to sense when it is *up*.
>
>
> Is *up* the same as "not down"? I was thinking it was, but that may not be the
> case.
I think that you are right, that they are the same thing.
>
>
> > >
> > > So you said, the forward/backward must be changed while the feet are in the air.
> > > We've been thinking of having a touch sensor on the front feet, so it can detect
> > > when it goes off an edge (like a table). However, it would not know the surface
> > > is not there, until it trys to put the foot down. So, all the feet would be
> > > down, and it needs to backup. Can it do that? Or will it need to keep walking
> > > a bit?
> >
> > As soon as you figure out that a foot is up, you can reverse directions. I'll
> > have to study the state sequence, because there are two non-weight bearing
> > pistons that control the feet, so it might be sufficient to see that they are
> > telling the feet to lift. You might need two touch sensors wire-ORed together
> > (one for each leg group).
>
>
> This sounds like we can NOT do the table edge detection stuff, using it's feet.
Hmmm.... We would need to know two things to determine we'd hit the edge of the
table.
1. The foot is down as far as it will go.
2. The down foot is not touching anything.
We would need one of these sensor pairs for each front foot.
When the foot is down and not touching anything, we wait for the foot start to
rise, and flip the muxes to backwards. At the time the legs get to the top,
they will go backwards, so I don't think we'll walk off the table.
>
> Imagine you're crawling around on your hands and knees, with your eyes closed.
> When you get to the top of a stairway, you put your hand down, and it doesn't
> touch the ground.
>
> If I understand you correctly (which doesn't always happen via e-mail) you must
> continue to crawl forward, until your other hand and knee are off the ground.
>
> That will be a problem.
>
> It's fine if it can't turn, or switch to moving sideways while all feet are on
> the ground, but it really needs to be able to reverse direction.
>
> I suspect the front legs can be a small amount longer, so it will detect the
> lack of ground, before the weight is really shifted to the new legs.
Remember, 7 of the 8 legs will be down at the time we realize that we're at the
edge. Given that pneumatics are slow, we should have plenty of time to slam it
into reverse.
>
> Will that work?
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > This sounds like we can NOT do the table edge detection stuff, using it's feet.
>
> Hmmm.... We would need to know two things to determine we'd hit the edge of the
> table.
>
> 1. The foot is down as far as it will go.
> 2. The down foot is not touching anything.
>
> We would need one of these sensor pairs for each front foot.
Right. That's listed somewhere in my prior ramblings. It should work fine with
2 inputs (one for each foot)
> When the foot is down and not touching anything, we wait for the foot start to
> rise, and flip the muxes to backwards. At the time the legs get to the top,
> they will go backwards, so I don't think we'll walk off the table. • ...
>
> Remember, 7 of the 8 legs will be down at the time we realize that we're at the
> edge. Given that pneumatics are slow, we should have plenty of time to slam it
> into reverse.
We may need to figure something out, here. I think it WILL be a problem.
At any given time, he will (could) have only four feet on the ground, right?
If I understand this correctly, when he puts his other four feet down, and
senses one foot is off the table, he must continue walking forward, raising four
feet from the table, and leaving him standing on three feet, including NO front
feet.
That makes me think we'll have to consider weight distribution, and how it will
balance on three feet.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > This sounds like we can NOT do the table edge detection stuff, using it's feet.
> >
> > Hmmm.... We would need to know two things to determine we'd hit the edge of the
> > table.
> >
> > 1. The foot is down as far as it will go.
> > 2. The down foot is not touching anything.
> >
> > We would need one of these sensor pairs for each front foot.
>
>
> Right. That's listed somewhere in my prior ramblings. It should work fine with
> 2 inputs (one for each foot)
OK. You are going to put two touch sensors on one port?
I thought you needed to know that the leg is fully extended, but not touching.
How will you do that with one sensor port?
>
>
> > When the foot is down and not touching anything, we wait for the foot start to
> > rise, and flip the muxes to backwards. At the time the legs get to the top,
> > they will go backwards, so I don't think we'll walk off the table. ...
> >
> > Remember, 7 of the 8 legs will be down at the time we realize that we're at the
> > edge. Given that pneumatics are slow, we should have plenty of time to slam it
> > into reverse.
>
> We may need to figure something out, here. I think it WILL be a problem.
>
> At any given time, he will (could) have only four feet on the ground, right?
>
> If I understand this correctly, when he puts his other four feet down, and
> senses one foot is off the table, he must continue walking forward, raising four
> feet from the table, and leaving him standing on three feet, including NO front
> feet.
>
> That makes me think we'll have to consider weight distribution, and how it will
> balance on three feet.
You are right, he needs to balance on the three feet that are further back, but
it will not have to walk forward. It can walk backwards.
Kevin
>
> Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> You are going to put two touch sensors on one port?
>
> I thought you needed to know that the leg is fully extended,
> but not touching. How will you do that with one sensor port?
I can think of two was: use two touch sensors, and be able to read the state
of both of them (you can do this with a 3rd party multiplex, or cybermaster
sensors (which are kinda rare... right, Steve?), or use touch sensors stacked
with standard LEGO lights. Even using this last method (the roughest of the
bunch), I can easily get two touch sensors per port (and could get more, but it
gets bulky).
I'm trying to think of a good way to use two touch sensors ANDed together,
but a "false" reading doesn't tell you the legs have completed their motion.
--
Brian Davis
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Brian Davis wrote:
> I'm trying to think of a good way to use two touch sensors ANDed together,
> but a "false" reading doesn't tell you the legs have completed their motion.
Again, the main goal is to know when the leg is extended, and the foot isn't
touching the ground.
So, you can mount the foot sensor so it's normally closed (pressed) except when
the foot is on the ground and mount the leg sensor so it is normally open,
except when the leg is down. Then, wire them in series (ANDed) so if they are
both closed, the leg is extended, and the foot is not touching.
Using this method, you could connect both front feet to a single sensor port.
When the port is "closed", one of the feet has a problem, and it must
stop/backup. But, the RCX can't detect if he's successfully walking, like it
can with some other methods.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > > Hmmm.... We would need to know two things to determine we'd hit the edge of the
> > > table.
> > >
> > > 1. The foot is down as far as it will go.
> > > 2. The down foot is not touching anything.
> > >
> > > We would need one of these sensor pairs for each front foot.
> >
> >
> > Right. That's listed somewhere in my prior ramblings. It should work fine with
> > 2 inputs (one for each foot)
>
> OK. You are going to put two touch sensors on one port?
>
> I thought you needed to know that the leg is fully extended, but not touching.
> How will you do that with one sensor port?
There are a couple ways that come to mind. If you don't want to know the
details, skip ahead...
We want to know when the leg is extended, and the foot is not touching the
ground.
There will be four possible states:
1) Leg up, foot not touching ground
2) Leg extended, foot not touching ground
3) Leg up, foot touching ground
4) Leg extended, foot touching ground
The first thing to remember is that when the foot IS touching the ground, it
doesn't matter if the leg is extended. (that's the key to making it easy)
So, there's only three usable states. The "foot" sensor can override the
reading from the "leg" sensor.
If you connect a light sensor to look at the leg/knee joint, so it reads white
when the leg is extended, and grey or black when it's in other places, then you
can also connect the foot touch sensor to the same port.
When the foot sensor is "open" the RCX will read values from the light sensor,
so it can actually calculate the exact location of the leg/joint. When the foot
sensor is "closed" it can assume the foot is on the ground, so the leg must be
extended.
You could also do something like that with two touch sensors, and a couple
lights. I have even more ideas, but I think the light/touch combination would
be the best, and most "stock LEGO" approach.
> > If I understand this correctly, when he puts his other four feet down, and
> > senses one foot is off the table, he must continue walking forward, raising four
> > feet from the table, and leaving him standing on three feet, including NO front
> > feet.
> >
> > That makes me think we'll have to consider weight distribution, and how it will
> > balance on three feet.
>
> You are right, he needs to balance on the three feet that are further back, but
> it will not have to walk forward. It can walk backwards.
Well, it will walk forward enough to lift the other four feet off the ground,
before it starts backward, again.
I'm going to have to look at the walking logic more to understand why it can't
start walking backward, while all the feet are on the ground.
So, we'll need to make sure the center of gravity is closer to the third set of
legs, and it CAN'T be in front of the second set.
I hope Eric's listening. :)
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
<snip>
> > > If I understand this correctly, when he puts his other four feet down, and
> > > senses one foot is off the table, he must continue walking forward, raising four
> > > feet from the table, and leaving him standing on three feet, including NO front
> > > feet.
> > >
> > > That makes me think we'll have to consider weight distribution, and how it will
> > > balance on three feet.
> >
> > You are right, he needs to balance on the three feet that are further back, but
> > it will not have to walk forward. It can walk backwards.
>
>
> Well, it will walk forward enough to lift the other four feet off the ground,
> before it starts backward, again.
Nope. The sequence is:
1. All feet down.
2. Lift one foot group
3. Sweep legs
4. put feet down
5. Lift other foot group
6. Sweep legs
So it does not need to walk forward to lift the feet.
>
> I'm going to have to look at the walking logic more to understand why it can't
> start walking backward, while all the feet are on the ground.
The description is here:
http://www.kclague.net/Quad242/quad242-design.jpg
Piston A is a timing only piston (i.e. it is not part of any leg assembly).
A' and A'' are weight bearing leg pistons that simply mimic A.
Piston B is a timing only piston.
B' and B'' are weight bearing leg pistons that simply mimic B.
C,D,E, and F are hip pistons that force the legs to sweep.
A' is paired with C
A'' is paired with D
B' is paired with E
B'' is paired with F
A contract = B' & B'' & ~C & ~D & E & F
A expand = C & D & ~E & ~F
A' = A
A'' = A
B contract = A' & A'' & C & D & ~E & ~F
B expand = C & D & ~E & ~F
B' = B
B'' = B
C expand = D expand = E contract = F contract =
A' & A''
C contract = D contract = E expand = F expand =
B' & B''
To flip from forward to reverse involves swapping the inputs to C, and the
outputs from F.
The feet go to the ground at synhronization points 0 and 3. Those depend on B',
B'' and A', A'' respectfully. Throwing it into reverse at this time would try
to make the feet sweep while the feet are on the ground.
At synchronization points S1 and S4, two of the four feet are on the ground, and
C, D, E, and F will be trying to change, so this is the fine time to flip it
from forward to reverse or visa versa.
At syncrhonization points S2 and S5, you are depending on the fact that C, D, E
and F have stabilized to expand A or B respectively. Now is not a great time to
reverse polarities because you have a potential race between polarity reversal
and A or B completing expansion, so the results are hit or miss.
>
> So, we'll need to make sure the center of gravity is closer to the third set of
> legs, and it CAN'T be in front of the second set.
>
> I hope Eric's listening. :)
Is he back yet?
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
<snip>
>
> A contract = B' & B'' & ~C & ~D & E & F
> A expand = C & D & ~E & ~F
>
> A' = A
> A'' = A
>
> B contract = A' & A'' & C & D & ~E & ~F
> B expand = C & D & ~E & ~F
Oops:
B expand = ~C & ~D & E & F
>
> B' = B
> B'' = B
>
> C expand = D expand = E contract = F contract =
> A' & A''
>
> C contract = D contract = E expand = F expand =
> B' & B''
>
> To flip from forward to reverse involves swapping the inputs to C, and the
> outputs from F.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > Well, it will walk forward enough to lift the other four feet off the ground,
> > before it starts backward, again.
>
> Nope. The sequence is:
>
> 1. All feet down.
> 2. Lift one foot group
> 3. Sweep legs
> 4. put feet down
> 5. Lift other foot group
> 6. Sweep legs
>
> So it does not need to walk forward to lift the feet.
I keep thinking about a rotary type walker, where the feet more or less go in a
circle and the body is always moving forward. Please forgive me. :)
So, when it lifts one leg group, and someone switches it into reverse, will it
put those legs back down, right away, and lift the other leg group?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > Well, it will walk forward enough to lift the other four feet off the ground,
> > > before it starts backward, again.
> >
> > Nope. The sequence is:
> >
> > 1. All feet down.
> > 2. Lift one foot group
> > 3. Sweep legs
> > 4. put feet down
> > 5. Lift other foot group
> > 6. Sweep legs
> >
> > So it does not need to walk forward to lift the feet.
>
> I keep thinking about a rotary type walker, where the feet more or less go in a
> circle and the body is always moving forward. Please forgive me. :)
>
> So, when it lifts one leg group, and someone switches it into reverse, will it
> put those legs back down, right away, and lift the other leg group?
Nope. It will force the legs to the correct position for walking backwards, and
then drop the feet.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > So, when it lifts one leg group, and someone switches it into reverse, will it
> > put those legs back down, right away, and lift the other leg group?
>
> Nope. It will force the legs to the correct position for walking backwards, and
> then drop the feet.
I could be wrong (missing something) but I think if the switch is flipped
immediatly after they raise up, then the legs are in the correct position.
If you're walking forward, and switch to reverse right as your foot comes off
the ground, you just want to put it back on the ground, right where it was.
I don't think the legs need to be moved.
Of course I still haven't really looked at your drawing...
Am I missing something?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > So, when it lifts one leg group, and someone switches it into reverse, will it
> > > put those legs back down, right away, and lift the other leg group?
> >
> > Nope. It will force the legs to the correct position for walking backwards, and
> > then drop the feet.
>
>
> I could be wrong (missing something) but I think if the switch is flipped
> immediatly after they raise up, then the legs are in the correct position.
>
> If you're walking forward, and switch to reverse right as your foot comes off
> the ground, you just want to put it back on the ground, right where it was.
>
> I don't think the legs need to be moved.
>
> Of course I still haven't really looked at your drawing...
>
> Am I missing something?
Probably not.
Kevin
>
> Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
>
> <snip>
> >
> > I hope Eric's listening. :)
>
> Is he back yet?
>
> >
> > Steve
>
> Kevin
I'm back I'm back. What can I do?
I want to build something.
I'm gonna make a concept moc moc up. Pun intended.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
> I'm gonna make a concept moc moc up. Pun intended.
MOC-up! I love it!
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
Ahem,
> So, we'll need to make sure the center of gravity is closer to the third set of
> legs, and it CAN'T be in front of the second set.
>
> I hope Eric's listening. :)
>
> Steve
So we can incorporate the tail's funtionality and weight to help aid the robot
by swinging or uncurling the tail so it faces away from the body and is extended
back. This shifts the center of gravity away from the front of the body. Hey a
Scorpion's tail is pretty handy huh?
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
Ahh now we are getting somewhere.
> This sounds like we can NOT do the table edge detection stuff, using it's feet.
>
> Imagine you're crawling around on your hands and knees, with your eyes closed.
> When you get to the top of a stairway, you put your hand down, and it doesn't
> touch the ground.
>
> If I understand you correctly (which doesn't always happen via e-mail) you must
> continue to crawl forward, until your other hand and knee are off the ground.
>
> That will be a problem.
Hmmm, indeed, or perhaps if we monitor the time it takes for a Leg to hit the
ground and then install a logic command that will take action if the leg does
not hit the ground in a predetermined amount of time. If the leg's foot sensor
does not detect the presence of solid ground within the time it normally takes
to hit the ground, it can be presumes there is no ground and this could be
managed and corrected. So when a foot does not "feel" the ground ahead of it in
a predetermined amount of time; the time it normally takes to hit the ground, it
can begin the self preservation/course reversal actions.
Could we still do this then?
> It's fine if it can't turn, or switch to moving sideways while all feet are on
> the ground, but it really needs to be able to reverse direction.
>
> I suspect the front legs can be a small amount longer, so it will detect the
> lack of ground, before the weight is really shifted to the new legs.
>
> Will that work?
Or install a command that will trigger the reverse seqence, should the foot not
send a tounch down signal within the expected arrival time.
cool right. I got my hand in the cookie jar.
e
> Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
>
> > This sounds like we can NOT do the table edge detection stuff, using it's feet.
> >
> > That will be a problem.
>
> Hmmm, indeed, or perhaps if we monitor the time it takes for a Leg to hit the
> ground and then install a logic command that will take action if the leg does
> not hit the ground in a predetermined amount of time.
Detecting the table edge is not the problem. We can do that with a sensor in
the hip/leg in addition to one in the foot. Then, when the leg is extended, and
the foot is not touching, there is an error.
The problem (as I see it) is that it must can not backup right away. It must
lift the other leg group off the surface, before it can backup.
I'm not sure the exact sequence (I still haven't looked at Kevin's 242 paper
long enough to understand it) but we may be able to start backing up as soon as
the valve is switched, causing the legs to start UP. So, the feet would still
(pretty much) be on the ground, and it will start backing up.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
The latest robotic update:
As it stands now, SSClagorpion will:
1) Move: (one of these at a time)
A) Walk forward & backward,
B) Turn right & left
C) Step right & left (move sideways)
D) Stop
2) Open & close two claws on it's arms (via pneumatics)
3) Move it's tail. (curl? via pneumatics?)
4) It can stay on a table/stage,
5) Detect when it bumps into something (when going forward),
6) Follow the "controller"
7) Be driven around like an RC car.
Is that enough cool functionality?
To do this we need:
1 Spybot w/controller
2 RCXs
4 motors for movement
2 motors for claws (built into Spybot)
1 motor for tail stuff
2 touch sensors for front feet
2 light sensors for leg position (of front feet)
2 touch sensors (or rotation sensors) for arm-bump detection
This leaves us ports for 1 more motor, and 2 more sensors, and there is
currently no function for the touch and light sensors built into the Spybot.
The above totals don't count motors and batteries for a compressor.
That's where I stand.
I'm interested in messing around with an arm design that can use a rotation
sensor to detect when it comes into contact with an object.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > Ok, so what's required for walking sideways?
> > > I just happened to think, the legs should be in a known position when switching
> > > from forward/back to side-to-side.
> > >
> > > Do the legs need to be in a know position when switching from forward to
> > > backward? Or walking to turning? If so, we need sensors for that...
> >
> > Yes. Changing the forward/backward/turning muxes needs to be done when the feet
> > are in the air. Observing any one foot is probably sufficient.
> >
> > The above costs us four motors, and one sensor.
>
> Ok, we [plan to] have a sensor on the front foot, and can detect when that is
> down. So, no more sensors are required.
>
> So you said, the forward/backward must be changed while the feet are in the air.
> We've been thinking of having a touch sensor on the front feet, so it can detect
> when it goes off an edge (like a table). However, it would not know the surface
> is not there, until it trys to put the foot down. So, all the feet would be
> down, and it needs to backup. Can it do that? Or will it need to keep walking
> a bit?
Hey that is interesting. How would the robot actually behave in this
circumstance? We'll have to build it and teach it and build as necc.
e
>
> Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
-snip-
Good Read.
> Do the legs need to be in a known position when switching from forward to
> backward? Or walking to turning? If so, we need sensors for that...
>
>
> Here's my current bill of materials:
> 1 Spybot, for IR direction control. This is mostly used as a sensor.
> 2 RCXs. I really haven't counted I/O, but two sounds like enough.
> 1 Battery box for compressor(s)
Question please.
The Spybot. That's for Directional Control.
Can you eloborate? I find this interesting.
I have conceived of possible contrivences, I'm interested in dicussing a method.
What would the Spybot's two motors trigger exactly?...to aid in directional
control?
It also needs to be in a line of sight with the RCX right?
What possible arrangement set ups could there be? /are best?
Where in/on the body is best?
What main factors need to be in play in order to utilize the Spybot?
ie, what main valve switches, sensors, motor/polarity/pnuematic reversors need
to be in alignment so the functions can be triggered or guided by the Spybot.
Does it come down to having the said controls ending up at the outputs of the
Sypbot? So ultimately, what should those master controls be?
Strictly in the sense of, oh wait, could it just be two simple sensors that send
feedback to the RCX to trigger the Master Gait seqences? For turning, and moving
about?
Thoughts?
> All those should be installed in the body of the beast. The Spybot/RCXs will
> need to communicate via IR. (there are other options, but we'll start there)
>
> The Spybot has two motors, but very limited sensor feedback. It would be good
> to use the Spybot motors to activate something like claws (open & close), where
> it won't be critical if they work exactly right.
Just a thought. Having them in the Claws would be cool. It does alter the scale.
Or more so, it sets a certain scale range minimum.
btw, I have three Spybots.
> We can use the Spybot remote
> to send it commands, like "follow me" or "attack anything in front of you"
Refer to above, like I was asking, if you'll indulge me, what would you say in
your opinion is/are these funtions. What do they exactly refer to in the actual
design set up?
> All the outputs from 1 RCX control movement. 1=Activate, 2=function
> (turn/straight), 3=forward/backward
>
> Two inputs would be used for sensing the edge-of-table. That's one input for
> each front leg. Each leg would have one sensor to detect when the leg is in
> it's "down" position, and one sensor to detect the ground. The two sensors in
> each leg can be connected together, to use one input. This could be two touch
> sensors, or a touch+light sensor combination.
>
> Two inputs can be used for the arm "feelers". Maybe several touch sensors per
> arm, or one rotation sensor for each.
>
>
> I'm not sure the RCXs really need to "know" when the SSClagorpion is actually
> walking. It can assume if it runs the motors, then the switches are set, and it
> is going.
>
> Beyond that, there is one motor to set the switch for curling the tail.
>
> That leaves 2 motor outputs, and 2 sensor inputs, for further expansion. Plus a
> touch sensor & light sensor built into the Spybot. The outputs from the second
> RCX can be connected to a gearbox, like Eric was suggesting, if we want to
> control more things, but I think that may just make things more complex than
> they need to be.
Hey, that's up to you. If we need strength, either multiplex the pistons force
output with levers or other fulcrum advantages or go mechanical an gear it. If
the digits of this project prove wimpy. I'll mechanize it.
Ain't nothin a couple of 8 and 40 tooth gears and motors with my homie; wormie
can't fix.
>
> It would be nice to mount the Spybot in the end of the tail, but it needs to
> communicate with the RCXs via IR, so I don't think that will work well, unless
> we connect a fiber-optic line. No, I don't think that will work, either.
>
>
> So, SSClagorpion will walk forward & backward, turn right & left, open & close
> two claws, and move it's tail. It can stay on a table/stage, detect when it
> bumps into something (going forward), follow the "controller" or be driven
> around like an RC car.
>
> Is that enough cool functionality?
>
> Steve
Excellent. Somebody dare us to add Clikits.
we da meign.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > 1 Spybot, for IR direction control. This is mostly used as a sensor.
>
> Question please.
>
> The Spybot. That's for Directional Control.
> Can you eloborate? I find this interesting.
> I have conceived of possible contrivences, I'm interested in dicussing a method.
> What would the Spybot's two motors trigger exactly?...to aid in directional
> control?
>
> It also needs to be in a line of sight with the RCX right?
> What possible arrangement set ups could there be? /are best?
> Where in/on the body is best?
>
> What main factors need to be in play in order to utilize the Spybot?
> ie, what main valve switches, sensors, motor/polarity/pnuematic reversors need
> to be in alignment so the functions can be triggered or guided by the Spybot.
> Does it come down to having the said controls ending up at the outputs of the
> Sypbot? So ultimately, what should those master controls be?
>
> Thoughts?
Ok, so first of all, the Spybots, although limited, have one VERY cool feature.
It's their IR capability.
They have three IR sensors, so they can detect the direction of an IR signal
from a controller, and/or another Spybot. So, if you set a controller to beacon
mode, the Spybot can be programmed to follow it.
Basicly, I was thinking of using a Spybot as an external sensor for the main RCX
that's controlling SSClagorpion. When the Spybot receives signals from the
controller, it can process them, and send commands (via IR) to the RCX.
As for using the motors (so they don't go to waste) they could be connected
directly to pneumatic valves that open and close the claws.
The RCXs should be facing the Spybot. The Spybot can face any direction, but
should be in the same plane as the RCXs.
> Just a thought. Having them in the Claws would be cool. It does alter the scale.
> Or more so, it sets a certain scale range minimum.
I think it would be fine having a Spybot as the "head", connect two valves to
the motors, and only put the weight/size of a pneumatic cylinders in the claws.
Then the RCXs would be side-by-side in the neck/body of the beast.
> > We can use the Spybot remote
> > to send it commands, like "follow me" or "attack anything in front of you"
>
> Refer to above, like I was asking, if you'll indulge me, what would you say in
> your opinion is/are these funtions. What do they exactly refer to in the actual
> design set up?
Well, pretty much whatever commands we want to send to it. What do you want to
tell it to do? :)
As I said, we can have it follow the remote (turn towards the remote and walk
forward) or tell it to "STOP", or go forward...
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > >
> > > 1 Spybot, for IR direction control.
> Basicly, I was thinking of using a Spybot as an external sensor for the main RCX
> that's controlling SSClagorpion. When the Spybot receives signals from the
> controller, it can process them, and send commands (via IR) to the RCX.
Oh! That's cool, I get it.
> As for using the motors (so they don't go to waste) they could be connected
> directly to pneumatic valves that open and close the claws.
Right! Right! I get it, that answers the questions. I see. So the Spybots (oh
course doi!) wouldn't be in the claws. The motors of the Spybot (located in the
head or body or where ever) could trigger the Claw's valves. Because they are
hoses the "buisness end of the circut could be anywhere.
yep. yep.
> The RCXs should be facing the Spybot. The Spybot can face any direction, but
> should be in the same plane as the RCXs.
k.
> As I said, we can have it follow the remote (turn towards the remote and walk
> forward) or tell it to "STOP", or go forward...
nice. it will almost be alive.
Thought does come to mind.
Kevin, if you feel you need the Motor outputs from the Spybot to aid in the
walking systems et als... that option is also open. We don't have to use the
Spybot for the claws, but it is an example as I'm sure we all know. Though we
could use it as such.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Ignoring side walking for a moment.....
> > You might want to study this:
> >
> > http://www.kclague.net/Quad242/index.htm
>
>
> looks good. But slow.
This is a reality given large LEGO pneumatic pistons, but I knew this when I
started this project by inviting Eric to join me.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> looks good. But slow.
Thinking about this more.......
One of the reasons that makes this slow is the inherent piston friction which
combined with pressure defines the rate of expansion and contraction. So the
rate is not very negotiable.
But using
rate * time = distance
and turning it around for time we get
time = distance/rate
Since we cannot really control rate well, we must reduce distance to decrease
time.
In the past, to avoid stresses to structure, I've always made the piston/switch
linkage work so that the piston never pushes or pulls the switch to its limits.
i.e. The throw due to piston expansion contraction never exceeds the max throw
of the switch handle.
But...... if I use as little piston expansion/contract as I can to flip the
switch, I end up with the shortest time for piston expansion/contraction. Cut
the piston throw in half, and double your walk rate.
I'll start on new designs using this concept. Because I'm building something
that wants to tear itself apart, I'm going to use studded beams for extra
strength.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
<snip>
> But...... if I use as little piston expansion/contract as I can to flip the
> switch, I end up with the shortest time for piston expansion/contraction. Cut
> the piston throw in half, and double your walk rate.
>
> I'll start on new designs using this concept. Because I'm building something
> that wants to tear itself apart, I'm going to use studded beams for extra
> strength.
So using #1 axle connectors as the linkage, we get a reduced piston expansion,
down to 86% of maximum.
Using technic axle joiner perpendicular, we can reduce the range to 70% of
maximum. I can't think of a way to make this any smaller.
Reducing the expansion range of the piston also reduces the leverage the piston
has on the switch, making it harder to throw, increasing pressure requirements.
Ignoring the pressure issue, a simple reduction of 30% of throw, decreases time
by 30%, so the increase in step rate is less than doubled.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> <snip>
> > But...... if I use as little piston expansion/contract as I can to flip the
> > switch, I end up with the shortest time for piston expansion/contraction. Cut
> > the piston throw in half, and double your walk rate.
> >
> > I'll start on new designs using this concept. Because I'm building something
> > that wants to tear itself apart, I'm going to use studded beams for extra
> > strength.
Yes, I'd rather see a solid, strong, slow robot over a fast robot that succeeds
in tearing itself apart. :)
> Ignoring the pressure issue, a simple reduction of 30% of throw, decreases time
> by 30%, so the increase in step rate is less than doubled.
That's the throw of the switches, right? Not the throw of the cylinders on the
legs. So the legs will "move" at the same speed, but the time between the start
of one move, and the start of another move could be less.
In any case, yes, it does sound good.
I've been playing around with the Spybot & it's controller. I can make the
Spybot follow the remote, and I can process remote commands, which allows me to
"control" the Spybot, using it's nice little remote control.
I just had another idea. In the movie RoboCop, there was a big mech-looking
robot, which ended up going out of control. When we first saw that robot, they
powered it up, and the whole thing raised up a bit, and came to life.
That would be another cool trick for SSClagorion to do. Actually, I think by
letting all the pressure out of the system, it may sit down on the ground.
Then, when it's repressurized, it will "power-up". Is that right?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > <snip>
> > > But...... if I use as little piston expansion/contract as I can to flip the
> > > switch, I end up with the shortest time for piston expansion/contraction. Cut
> > > the piston throw in half, and double your walk rate.
> > >
> > > I'll start on new designs using this concept. Because I'm building something
> > > that wants to tear itself apart, I'm going to use studded beams for extra
> > > strength.
>
>
> Yes, I'd rather see a solid, strong, slow robot over a fast robot that succeeds
> in tearing itself apart. :)
>
>
> > Ignoring the pressure issue, a simple reduction of 30% of throw, decreases time
> > by 30%, so the increase in step rate is less than doubled.
>
> That's the throw of the switches, right? Not the throw of the cylinders on the
> legs. So the legs will "move" at the same speed, but the time between the start
> of one move, and the start of another move could be less.
>
> In any case, yes, it does sound good.
>
>
>
> I've been playing around with the Spybot & it's controller. I can make the
> Spybot follow the remote, and I can process remote commands, which allows me to
> "control" the Spybot, using it's nice little remote control.
>
>
>
> I just had another idea. In the movie RoboCop, there was a big mech-looking
> robot, which ended up going out of control. When we first saw that robot, they
> powered it up, and the whole thing raised up a bit, and came to life.
>
> That would be another cool trick for SSClagorion to do. Actually, I think by
> letting all the pressure out of the system, it may sit down on the ground.
> Then, when it's repressurized, it will "power-up". Is that right?
Well Steve, it might and it might not. Given 18 bits of state (two bits/pistons
per leg plus two extra), we could have a total of 256K possible combinations of
leg positions. We only want about about 10 of them. If we start out the
pistons in one of the desired state combinations it will progress through the
magic sequence and get back to the initial state.
If we start it out in an unexpected state, it is hard to know what it will do,
but it probably won't get itself into a desired state. It will probably just
hang.
It would take a *lot* more logic (switches and maybe pistons) to make it self
correcting and get itself back into a good state.
So the short answer is *probably* not.
>
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > This will be interesting because it is my first partner build.....
>
> I assume you're not counting the Team Magno fiasco. I guess there really wasn't
> much building involved there. :)
I built nothing there, I just programmed. For me these two experiences are
*very* different.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
This will be interesting because it is my first partner build.....
|
|
Steve, I think its cool too because you have experience at obtaining objectives
like with the Robotics Challanges you have participated in. As well as you own
work.
| |
| |
1. Typically they walk forward with two groups of four legs.
2. Turning is done by using a different sweep, primarily with the front
two and back two legs.
|
...
| |
Two groups of four legs is a simple extension to hex242 and hex363.
|
Will this type of design allow it to turn in place, or can it only turn while
walking forward/backward?
I think it should be able to turn in place. That could mean dis-connecting
the legs on each side.
|
A nice quad pivot pattern with opposesing sweep movements alternating to change
the body’s direction. See what Kevin can do with the air circuts. I know he has
worked hard to created the alternating leg motion, the tough part is to have a
seperate sub sequence that can be “Switched” into place to begin the turn cycle.
A toughie. Am I right? Oh escpecially since many alternating cycles will have to
take place. The body will be able to spin in it’s own foot print.
Or there are other creative ways to slowly alter the gate to start heading it in
different directions, but that is not practical in terms of trying to attain
agility.
We’ll just see what Kevin comes up with and we’ll work with that.
I also offer the old addage that if you plan for 10 cool things or functions to
be included in a creation, and if you only get 8 or 9 of them nailed down, then
you did ok. There is always compromise with practicallity. Just tossing that
out.
| |
Also, moving sideways would be cool. That would mean adding a side-to-side
piston, to go along with the forward/back piston on each leg. Right?
|
That would help it trun better too? right? if you could that would be cool.
My inital thought as I eleuded too before, is to what level do we want to pursue
this. Do we want to make it super badass and include all kinds of great stuff or
do we want to see if we can just manage letting Kevin create the muscles, I make
it look good and you Steve guides us in sensor placement and articulation
management.
We can try a few paths, its fun to think about how we determine the best route.
My first priority is to allow the muscle movement to be set by Kevin and have
him detail to you Steve the kinds of links that will needed to manage the Leg
Systems.
| |
| |
The walking mechanism will be completely wired into pneumatics. For walking
backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
The RCX may need to know that we are in the right state before it changes the
muxes, so that will take some kind of sensor.
|
The control could be Motor->pneumatic switch for:
A) Forward/Backward/Stop (x2) (one for each side, as in diff drive)
or
B) Forward/Backward and a second switch for Stop/Go (x2)
or
C) Forward/Backward, Stop/Go, Same/Opposide (legs on both sides go same
direction or opposite direction)
Any thoughts about what works well, Kevin?
|
Nice!
| |
| |
Other kinds of articulation could include the claw arms, and/or the tail.
|
The claw is a must. As is curling the tail.
But, do the arms move?
As I said, I’d like to see sensors on the arms, somewhat like antenna, so when
it’s being autonomous, it can detect objects. And on the front feet, so it
can avoid falling in holes, or walking off tables.
|
We’ll totally do that. We can mount Sensor on the front or backside of the Claw
to help detect things. Also, on the tips of the Legs as you suggested.
Could we consider using touch sensors on the tips of the feet so we can
determine when each foot is on the ground, or react if a given leg is not where
it is expected to be? Like edge of the table detection like you suggested?
Also there is a special set of organs at the bottom of the head that sweep the
group that gives the Scorpion more info about its surroundings, we could emulate
that too as an additional set of protection/avoidance sensors.
| |
The first challenge I see from our brief discussions, is that Eric builds
backward. :) I think both Kevin and I start from the inside, and build out.
While Eric starts on the outside, and builds in.
|
ok, sorry but you got that mixed up. I gotta correct you on that one.
You gotta go to school in my Brickshelf Gallery.
All my creations start our with functions and frame work built first. What you
see is the illusion crafted over the mecha underneath. If you thought otherwise
then I have succeeded in my craft.
In other words by that logic do you really think I made Jama beautiful then made
the guts, no way, form and function are considered upon eachother in a combined
way until a sweet song is produced I listen for the song when searching for the
best most beautiful solution I can. IMHO.
Look!



| |
I usually worry about how my robot look, but that’s secondary to how they
work.
|
Make the leap. This is what this project is about. Form and Function synergized.
I never scarifice looks for function or vise versa, so long as scale permits.
If not, I just build bigger and enjoy the enpansion in rules.
cool, this will be fun.
e
p.s. btw, I should predicate this upon Kevin’s desire to bring an additional
organic feel to the systems he has created. He approached me and asked if we
could create something together that used the best of our own merits.
And now I’m so glad you Steve are willing to enter into this triumvirate to help
manage the subsytems and advise. Your ability to help engineer sensor placement
and RCX control will help greatly.
Heck maybe we can get a JCX out of it.
;)
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
I also offer the old addage that if you plan for 10 cool things or functions
to be included in a creation, and if you only get 8 or 9 of them nailed down,
then you did ok. There is always compromise with practicallity. Just tossing
that out.
|
Yes. Right now, I think we’re still brainstorming, so we need to come up with
all the cool ideas about what we want to do, then we can figure out what is
feasable, and what we want to skip.
| |
My inital thought as I eleuded too before, is to what level do we want to
pursue this. Do we want to make it super badass and include all kinds of
great stuff
|
Yes. Start with super badass, and trim from there.
| |
| |
As I said, I’d like to see sensors on the arms, somewhat like antenna, so
when it’s being autonomous, it can detect objects. And on the front feet,
so it can avoid falling in holes, or walking off tables.
|
We’ll totally do that. We can mount Sensor on the front or backside of the
Claw to help detect things. Also, on the tips of the Legs as you suggested.
Could we consider using touch sensors on the tips of the feet so we can
determine when each foot is on the ground, or react if a given leg is not
where it is expected to be? Like edge of the table detection like you
suggested?
|
We’ll need touch sensors on the tip of the front leg (foot) and also some way to
detect when the foot should be touching the ground (when it’s at the bottom of
it’s movement)
| |
Also there is a special set of organs at the bottom of the head that sweep
the group that gives the Scorpion more info about its surroundings, we could
emulate that too as an additional set of protection/avoidance sensors.
|
I like Kevin’s idea of going with an all LEGO build. (for now) That keeps us
limited to contact sensors for object detection.
If we do cross over that line, there are many things we can get ahold of from
HiTechnic, like this: http://www.hitechnic.com/developmentlab.htm
| |
All my creations start our with functions and frame work built first. What
you see is the illusion crafted over the mecha underneath. If you thought
otherwise then I have succeeded in my craft.
|
so, you have. :)
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> This will be interesting because it is my first partner build..... and I know of
> no pattern to follow. We each have our own approaches and I'm not sure how
> similar they are. I figured we might as well do the designing process here on
> LUGNET, rather than behind the scenes. If people object, we can take this
> conversation offline.
This is my first Co-build as well. But not my first multi-person project.
I have also witness first hand the success you both have had in working with
others and in your own projects.
I'm interested in unlocking my potential. I'm interested in synergy.
> For me, because the pneumatics control plays such a large part, the overall
> walking mechanism can have a huge impact on the body design. Now with the
> Sophie effect coming into play, we get to consider much more. I like it.
blush.
> Here is a site that has lots of scorpion pictures. I'll leave it to Eric's
> artistic eye to pick the species we're going for.
>
> http://www.ub.ntnu.no/scorpion-files/gallery.php
Ahh reference.
> I start with the overall concept of the walking mechanism..... Inarguably a
> scorpion has eight legs, and does not use its own body as a leg, so the body
> must stay off the ground during the walking process. I tried unsuccessfully to
> find movie clips of scorpions walking, but no lock, so I'll make some
> assumptions.
>
> 1. Typically they walk forward with two groups of four legs.
> 2. Turning is done by using a different sweep, primarily with the front two
> and back two legs.
>
> If we want to avoid gravity wells, we can use the hex242 circuit with extensions
> to support forward and backward movement. We might have to have some special
> help for turning (maybe bias the sweep forward or backwards).
>
> The leg sweep will be similar to the way that an oar on a rowboat moves.
> Down,back,up,forward.
>
> This requires two pistons (plus two switches each) per leg. One for
> forward/backward, and the other for up/down. Each piston has to control two
> switches that basically instrument the piston state for the rest of the circuit.
> The switches can be anywhere as long as they are mechanically linked to the
> expansion and contraction of the piston.
>
> If SSCorpion gets too heavy we can double or triple up pistons for a given
> degree of freedon. The multiple pinstons will be mechanically linked so they
> all expand at the same rate.
>
> Two groups of four legs is a simple extension to hex242 and hex363.
excellent.
> Scorpion's body looks oval, close to rectangular, so the leg sweeps should be
> all about the same mechansim.
>
> The walking mechanism will be completely wired into pneumatics. For walking
> backwards, we can use pneumatic polarity reversors controlled by RCX/Motors.
> The RCX may need to know that we are in the right state before it changes the
> muxes, so that will take some kind of sensor.
we can work a couple of tricks for this. it will be cool. and intensive.
> Other kinds of articulation could include the claw arms, and/or the tail.
>
> The tail is pretty rigid unless a scorpion is threatened, then the scorpion
> tries to make itself bug by standing taller, bringing the tail far forward, and
> raising its claws. This is not part of the regular walking mechanism, so we'll
> have to figure out if this is pneumatic (my guess for now is no.)
>
> I think that we have a lot of freedom as to the shape of the body, so we need to
> work on the hip and leg joints and leg structure.
>
> Eric, do you have enough to work up body and leg stuff? My only constraints are
> that there are two switches per piston, and two pistons per leg. Feel free to
> add more pistons if you think they are needed.
>
> Kevin
Ok, the way a Scorpion rears up and curls or extends its tail forward to sting
or threaten, wow, that requires some travel at the upper leg connection at the
body. It would be cool.
I have many thoughts that can be translated into brick form. I see this Grand
Scorpion, over 2 dozen pistons. Technic. Yellow cyclinders. sensors on switches.
hoses. trained all over. bundles routed all over in and out of compressors.
Motors and sensor leads to RCXs'. more technic frame work.
Arms. hoses. pistons. Switches. more then one sensor. Claws. gripy. tactile.
Tail. ready. poised. pistons. master sensor/locator/suite in place of stinger.
Can I build a moc up. or can I help you replicate the legs and help provide
parts for the truss of frame work. What techinc bits do you need. I'll count my
pnuematics.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
>
> This is my first Co-build as well. But not my first multi-person project.
> I have also witness first hand the success you both have had in working with
> others and in your own projects.
>
> I'm interested in unlocking my potential. I'm interested in synergy.
synergy. cool. :)
> Ok, the way a Scorpion rears up and curls or extends its tail forward to sting
> or threaten, wow, that requires some travel at the upper leg connection at the
> body. It would be cool.
I hadn't really thougth about standing up on it's hind legs. I don't know how
well it will work, but what if it were to sit down (front legs straight, back
legs fully retracted) then, start straightning legs from the front to the back.
The net effect would (could) be to stand up on it's rear legs & tail.
Nice trick for a dog. Great trick for a scorpion. :)
The balance would need to be just right, and the back legs would need to be
strong enough to lift the whole robot. If we can do it, it would be great.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Eric Sophie wrote:
> >
> > This is my first Co-build as well. But not my first multi-person project.
> > I have also witness first hand the success you both have had in working with
> > others and in your own projects.
> >
> > I'm interested in unlocking my potential. I'm interested in synergy.
>
> synergy. cool. :)
>
>
> > Ok, the way a Scorpion rears up and curls or extends its tail forward to sting
> > or threaten, wow, that requires some travel at the upper leg connection at the
> > body. It would be cool.
>
> I hadn't really thougth about standing up on it's hind legs. I don't know how
> well it will work, but what if it were to sit down (front legs straight, back
> legs fully retracted) then, start straightning legs from the front to the back.
> The net effect would (could) be to stand up on it's rear legs & tail.
>
> Nice trick for a dog. Great trick for a scorpion. :)
Actually we want it to stand on its front legs. This brings the tail forward.
Scorpions sting forward with their tails, so we need to lower the front end and
raise the backend, plus curl the tail forward more than normal.
>
> The balance would need to be just right, and the back legs would need to be
> strong enough to lift the whole robot. If we can do it, it would be great.
If we add a degree of freedom that makes the hip thrust the leg downward, along
an axis from front to back, this will thrust the back end up.
>
> Steve
Quad242/Hex363 class walkers have a simple formula for the number of pistons and
switches needed. One piston and switch per leg group plus two pistons and four
switches per leg.
Since it looks like SSClagorpion will be a Quad242/Hex363 class walker, it will
take:
Pistons = 2 + 2*8 = 18
Switches = 2 + 4*8 = 34
We need four polarity reversors for forward/backward/right/left controls. Each
reversor takes four switches, so we have to add another 16 switches.
Now we're up to 50 switches and 18 pistons. I know I have this much but I have
a rediculous amount of pneumatics. Thank goodness for bricklink and the 8455!
Side walking will cost us even more......
SSClagorpion (at least the first copy) is coming out of Eric's inventory, so I
think we might be limited by the number of switches he has.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > > Ok, the way a Scorpion rears up and curls or extends its tail forward to sting
> > > or threaten, wow, that requires some travel at the upper leg connection at the
> > > body. It would be cool.
> >
> > I hadn't really thougth about standing up on it's hind legs. I don't know how
> > well it will work, but what if it were to sit down (front legs straight, back
> > legs fully retracted) then, start straightning legs from the front to the back.
> > The net effect would (could) be to stand up on it's rear legs & tail.
> >
> > Nice trick for a dog. Great trick for a scorpion. :)
>
> Actually we want it to stand on its front legs. This brings the tail forward.
>
> Scorpions sting forward with their tails, so we need to lower the front end and
> raise the backend, plus curl the tail forward more than normal.
>
> >
> > The balance would need to be just right, and the back legs would need to be
> > strong enough to lift the whole robot. If we can do it, it would be great.
>
> If we add a degree of freedom that makes the hip thrust the leg downward, along
> an axis from front to back, this will thrust the back end up.
We could make this eaily with a Technic Turntables. Depends on how you will
create the legs. It will be your decision.
> >
> > Steve
>
> Quad242/Hex363 class walkers have a simple formula for the number of pistons and
> switches needed. One piston and switch per leg group plus two pistons and four
> switches per leg.
>
> Since it looks like SSClagorpion will be a Quad242/Hex363 class walker, it will
> take:
>
> Pistons = 2 + 2*8 = 18
> Switches = 2 + 4*8 = 34
>
> We need four polarity reversors for forward/backward/right/left controls. Each
> reversor takes four switches, so we have to add another 16 switches.
>
> Now we're up to 50 switches and 18 pistons. I know I have this much but I have
> a rediculous amount of pneumatics. Thank goodness for bricklink and the 8455!
>
> Side walking will cost us even more......
>
> SSClagorpion (at least the first copy) is coming out of Eric's inventory, so I
> think we might be limited by the number of switches he has.
>
> Kevin
Uggg, I don't have that many!
:(
I know I'm talking like I have got it all, but I still gotta give Rob Limbaugh
some. LOL!
heh heh Match ya? heh heh, if we fully consider the process and have commitments
and solid plans, we could, ask for help with parts.
When done in a way to promote building and understanding, we may qualify.
Hint Hint, nudge nudge, people in high places. Cough Cough.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Kevin L. Clague wrote:
> I figured we might as well do the designing process here on
> LUGNET, rather than behind the scenes. If people object,
> we can take this conversation offline.
Well, since nobody has objected, let me just say up front... PLEASE keep it
on-line. I agree with Steve, this is fun (and that's just as a spectator). With
regards to Steves question about "decoupling" the left and right sides, Kevin,
could you use an RCX as a higher level of control? Subsumption design, with one
layer being pneumatic, and a supervisory level (that could de-couple and
re-couple the pneumatic circuits on either side, for instance... have to sense
what state those circuits are in) that is electronic in the RCX / sensor net? I
would think mechanical switches either on critical legs, or, (perhaps better
from the standpoint of locating the sensor packages), pressure sensors on
critical hoses, could give the RCX feedback. Use the RCX IR/proximity detection,
and it's a cyclops SSCorpian with very simple vision (detect moving objects for
attack? hehehe...).
--
Brian Davis
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Brian Davis wrote:
> Kevin L. Clague wrote:
> > I figured we might as well do the designing process here on
> > LUGNET, rather than behind the scenes. If people object,
> > we can take this conversation offline.
>
> Well, since nobody has objected, let me just say up front... PLEASE keep it
> on-line. I agree with Steve, this is fun (and that's just as a spectator). With
> regards to Steves question about "decoupling" the left and right sides, Kevin,
> could you use an RCX as a higher level of control? Subsumption design, with one
> layer being pneumatic, and a supervisory level (that could de-couple and
> re-couple the pneumatic circuits on either side, for instance... have to sense
> what state those circuits are in) that is electronic in the RCX / sensor net? I
> would think mechanical switches either on critical legs, or, (perhaps better
> from the standpoint of locating the sensor packages), pressure sensors on
> critical hoses, could give the RCX feedback. Use the RCX IR/proximity detection,
> and it's a cyclops SSCorpian with very simple vision (detect moving objects for
> attack? hehehe...).
Hi Brian,
I figured there would be plenty of lurkers and non-so lurkers on this topic.
One of our goals is to have the scorpion turn in place. Hex242 could do this,
and it will be easy to make SSClagorpion (Eric's choice for name) do this as
well, without the need for the RCX in between the two sides.
Using two pneumatic polarity reversors, we can make SSClagorpion turn right.
WIth two more polarity reversors, we can make it turn left, or walk backwards.
The RCX can control the polarity reversors to modify walking behavior. I've
always thought of complex pneumatic sequencers as a way to work around the RCX's
limited I/O, and have always wanted to use the RCX for the higher brain
functions.
I think that the first step (pardon the pun), which is to prototype out a
strong pneumatic leg with two or three (side walking) degrees of freedom.
We may want to be able to articulate the hips to help SSClagorpion posture for
the attach.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Are you planning to publish building instructions and/or an ldraw version?
Hmm, over 2 dozen cylinders.... Backhoes are on special... Mebbe I'd better get
3.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Benton Jackson wrote:
> Are you planning to publish building instructions and/or an ldraw version?
All we know is that it is part of our goal to share the experience.
It is also tradition for all 3 of us to publish our work in one way or another.
We look forward to seeing what becomes of it.
> Hmm, over 2 dozen cylinders.... Backhoes are on special... Mebbe I'd better get
> 3.
Can we borrow your Lego Benton? Please?
;)
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
> Can we borrow your Lego Benton? Please?
What, and TAKE APART my backhoe? :P
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Benton Jackson wrote:
> > Can we borrow your Lego Benton? Please?
>
> What, and TAKE APART my backhoe? :P
I'll have Tim Courtney buy you one, nay, two Pints at Brick Fest.
How's that?
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Benton Jackson wrote:
> > > Can we borrow your Lego Benton? Please?
> >
> > What, and TAKE APART my backhoe? :P
>
> I'll have Tim Courtney buy you one, nay, two Pints at Brick Fest.
You're being quite friendly to someone who's usually just a lurker on lugnet.
Are you mistaking me for the other Ben Jackson, who might have actually been to
LugNet before?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Benton Jackson wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Benton Jackson wrote: • -snip-
> Are you mistaking me for the other Ben Jackson, who might have actually been to
> LugNet before?
ahh, Tim will buy you one too.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Benton Jackson wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > > In lugnet.technic, Benton Jackson wrote: -snip-
> > Are you mistaking me for the other Ben Jackson, who might have actually been to
> > LugNet before?
>
> ahh, Tim will buy you one too.
That would probably convince me, if I knew who Tim was, and if I ever went to
BrickFest. I'm not that dedicated an AFOL I guess.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Brian Davis wrote:
> > Kevin L. Clague wrote:
> I think that the first step (pardon the pun), which is to prototype out a
> strong pneumatic leg with two or three (side walking) degrees of freedom.
Yes, that's it! Kevin, Like you said, create the bestest strongest 2 or three
degree of movment prototype leg. Perfect it. We'll determine what parts you need
to build all the legs. As you work on the sequence routing and structures beyond
the leg so we can begin to join them centrally.
I want there to be a centralizing of compressors and others necc. switching
compenents located to the rear of the last set of legs in the back of the body.
This will serve to counter act the weight of the Arms.
So feel free to keep in mind the thorax and tail area are where your valve and
motor processes take place. Works out nice.
> We may want to be able to articulate the hips to help SSClagorpion posture for
> the attach.
If you want to do that, create the legs to have two degrees of movment and I
link the upper part of the Legs you create to the main connection point of the
body with Technic Turntables. So the 3 degrees required for each leg will be
divided into 2 parts pnuematic and one part mechanically articulated.
I mean you could have all 3 degrees per leg, wow, that's insane! But that's the
point right? This is what is possible.
Consider the upper leg connection to be mechanical if you so choose.
your choice.
> Kevin
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
<snip>
>
> > We may want to be able to articulate the hips to help SSClagorpion posture for
> > the attach.
>
> If you want to do that, create the legs to have two degrees of movment and I
> link the upper part of the Legs you create to the main connection point of the
> body with Technic Turntables. So the 3 degrees required for each leg will be
> divided into 2 parts pnuematic and one part mechanically articulated.
>
> I mean you could have all 3 degrees per leg, wow, that's insane! But that's the
> point right? This is what is possible.
>
> Consider the upper leg connection to be mechanical if you so choose.
> your choice.
I assumed that this third degree of freedom would me motorized.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
>
> <snip>
>
> >
> > > We may want to be able to articulate the hips to help SSClagorpion posture for
> > > the attach.
> >
> > If you want to do that, create the legs to have two degrees of movment and I
> > link the upper part of the Legs you create to the main connection point of the
> > body with Technic Turntables. So the 3 degrees required for each leg will be
> > divided into 2 parts pnuematic and one part mechanically articulated.
> >
> > I mean you could have all 3 degrees per leg, wow, that's insane! But that's the
> > point right? This is what is possible.
> >
> > Consider the upper leg connection to be mechanical if you so choose.
> > your choice.
>
> I assumed that this third degree of freedom would me motorized.
>
> Kevin
Oh excellent, then do you feel comfortable...or rather can you create everything
from the Technic Turntables down? Just give me something to grab from off of the
Legs to begin connections to the Turntables. Or you do it, or we could make a
standard. So they'll mate up to the main body.
btw, as you know, using Technic Turntables at this connection point on the body
is a sound way of creating this crucial joint. Work the turntable into the upper
joint of the Leg desgin, if you don't mind me suggesting.
{[On the other hand you could turn the Turntable into a big L-shaped lever and
articulate it pneumatically, with no motors at all. Then it could be part of
your circut. ?}
I'll take it from there. Or rather I can complete all of the internal gearing
and worm drives, along the center axis of the body.
Seriously, you might want to consider this, you know how the Technic Turntable
slipts in half? Well you should build the legs up to the "Top part" of the
Turntable and have it clip into the "Lower part" of the turntable on the main
body truss I create? Same with the Arms and Tail. I just provide the heviest
duty joint at the main body.
This 2 step pnuematic (lower half of leg) , 1 step motorized (upper leg joint)
can be managed by the RCX, it includes the pnuematics valve sensor controls
anyway. It'll all work together.
What do you suggest?
wait until your happy with a leg design ready to attachment to the central body.
You'l need your own Central body truss work to contain the Legs and and do
Testing! Boy this is sounding like alot of work on your end. Sure you don't want
me to build the body frame or perhaps arms and tail? What do you want?
Either way you'll know more once your creating the structure.
whatever works best for you.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Brian Davis wrote:
> > Kevin L. Clague wrote:
> > > I figured we might as well do the designing process here on
> > > LUGNET, rather than behind the scenes. If people object,
> > > we can take this conversation offline.
> >
> > Well, since nobody has objected, let me just say up front... PLEASE keep it
> > on-line. I agree with Steve, this is fun (and that's just as a spectator).
>
> I figured there would be plenty of lurkers and non-so lurkers on this topic.
>
> One of our goals is to have the scorpion turn in place. Hex242 could do this,
> and it will be easy to make SSClagorpion (Eric's choice for name) do this as
> well, without the need for the RCX in between the two sides.
I just made up a web page, so I have a place to put MY notes and thoughts.
http://www.teamhassenplug.org/robots/ssclagorpion/
Don't expect much there, yet, we're still pretty early in the project. Feel
free to bookmark the page. It's not going away anytime soon.
Now would be a good time for you two to do the same, if you want to track
progress.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
>
> I just made up a web page, so I have a place to put MY notes and thoughts.
>
> http://www.teamhassenplug.org/robots/ssclagorpion/
>
> Don't expect much there, yet, we're still pretty early in the project. Feel
> free to bookmark the page. It's not going away anytime soon.
>
> Now would be a good time for you two to do the same, if you want to track
> progress.
I like SCorPeon..... It has a nice ring to it.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > I just made up a web page, so I have a place to put MY notes and thoughts.
> >
> > http://www.teamhassenplug.org/robots/ssclagorpion/
>
>
> I like SCorPeon..... It has a nice ring to it.
Unfortunately, whenever I see SSClagorpion I think of a boat.
Maybe, we should give Eric the E and call it SCorp-Eon. :)
Or, it could be SCHorpion.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
Gents, I am going to upstate NY to prepare for an art show I have this weekend.
I will be out of the loop for a few days.
I look forward to picking this up when I return.
e
http://www.lugnet.com/~1051
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Masclet wrote:
> In lugnet.technic, Eric Sophie wrote:
> >
> > Then when we are done we can send it to Chris Masclet.
> >
> > ;)
>
>
>
>
> Hi Eric
>
> Best American builders, no parts quantity limit.... It seems I cannot fight !!
>
> ;-)
>
> Chris.
We will have a toast to you!
Perhaps we can consider the Hand design you developed for LEGOTIC!
It is now Kevin's pride!
What to do!
btw, you have made some interesting electronics. When the time comes feel free
to advise.
e
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> Re: The Clague - Sophie Project, has now become,
> The Clague - Sophie - Hassenplug Combine
Holy $%#*!!! This has instantly become one of the coolest Lego ideas I've seen
in recent memory! What a collaboration! A thread I'll be watching like a hawk.
With the talent of you three guys, makes me wonder where it will go!!!?
After building your deadly scorpion, you'll have to build a tuxedo wearing bot
to play Henry Lim's harpsichord! (hehe) What size tux do you think Jama wears?
Rock on guys! This will be fun to watch..........
-Tommy Rainwater
"Cogito Ergo Lego"
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Tommy Rainwater wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Re: The Clague - Sophie Project, has now become,
The Clague - Sophie - Hassenplug Combine
|
Holy $%#*!!! This has instantly become one of the coolest Lego ideas I’ve seen
in recent memory! What a collaboration! A thread I’ll be watching like a hawk.
With the talent of you three guys, makes me wonder where it will go!!!?
|
Thank you. Each of us I think knows the power of the building system.
I think we know it can happen. It is worthy. Consistant with our interests.
| |
After building your deadly scorpion, you’ll have to build a tuxedo wearing bot
to play Henry Lim’s harpsichord! (hehe) What size tux do you think Jama wears?
|
I don’t know let’s find out!

oh Jama will take a petite size 2 please.
| |
Rock on guys! This will be fun to watch..........
-Tommy Rainwater
“Cogito Ergo Lego”
|
We will make it happen. First the leg motion discovery.
e
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
In lugnet.technic, Tommy Rainwater wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
Re: The Clague - Sophie Project, has now become,
The Clague - Sophie - Hassenplug Combine
|
Holy $%#*!!! This has instantly become one of the coolest Lego ideas I’ve
seen in recent memory! What a collaboration! A thread I’ll be watching like
a hawk. With the talent of you three guys, makes me wonder where it will
go!!!?
|
Thank you. Each of us I think knows the power of the building system.
I think we know it can happen. It is worthy. Consistant with our interests.
-snip-
We will make it happen. First the leg motion discovery.
e
|
OKAY, I have not read this thread from the beginning but from the topic snippets
I have to say this is toooo cool! I too will be avidly watching this
manifestation.
Oh, and HELLO e! Long time, no see!
-Andrew
| | | | | | | | | | | | | | | | | | |
I re-introduce myself into the fold. Reading, catching up.
Meanwhile, what can you all tell me?
What can I do?
What’s going on?
Kevin how are you on parts?
Steve, are we ok on sensors and controllers?
Have we made progress?
What can I do?
Reading the thread.
e
Biomechanical Bricks on LUGNET
| | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
I re-introduce myself into the fold. Reading, catching up.
Meanwhile, what can you all tell me?
What can I do?
What’s going on?
Kevin how are you on parts?
|
Welcome back Eric. I’m fine on parts.
If you had a peek at my hip/leg prototypes, I was very happy with the hip sweep
structure relative to stresses and strains, but not the leg strength with
respect to horizontal stresses and strains.
As you can see, the only real requirement on the hip and leg is that we have two
pneumatic switches per piston to instrument the piston state.
Feel free to prototype out some of your own designs.
I’ve been very busy (not on LEGO) getting things together for a community
theater production of “One Flew Over the Cuckoo’s Nest”, and making sure I still
have a job at Sun at the beginning of May.
Once we clear the theatrical stuff, I’ll get back to triple articulated hip/leg.
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
I re-introduce myself into the fold. Reading, catching up.
Meanwhile, what can you all tell me?
What can I do?
What’s going on?
Kevin how are you on parts?
|
Welcome back Eric. I’m fine on parts.
If you had a peek at my hip/leg prototypes, I was very happy with the hip
sweep structure relative to stresses and strains, but not the leg strength
with respect to horizontal stresses and strains.
|
I have not seen the designs, I’m trying to catch up. Link?
| |
As you can see, the only real requirement on the hip and leg is that we have
two pneumatic switches per piston to instrument the piston state.
Feel free to prototype out some of your own designs.
I’ve been very busy (not on LEGO) getting things together for a community
theater production of “One Flew Over the Cuckoo’s Nest”, and making sure I
still have a job at Sun at the beginning of May.
|
Classic. That is a good one.
| |
Once we clear the theatrical stuff, I’ll get back to triple articulated
hip/leg.
Kevin
|
cool.
e
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Eric Sophie wrote:
| |
I re-introduce myself into the fold. Reading, catching up.
Meanwhile, what can you all tell me?
What can I do?
What’s going on?
Kevin how are you on parts?
|
Welcome back Eric. I’m fine on parts.
If you had a peek at my hip/leg prototypes, I was very happy with the hip
sweep structure relative to stresses and strains, but not the leg strength
with respect to horizontal stresses and strains.
|
I have not seen the designs, I’m trying to catch up. Link?
|
http://www.kclague.net/SSCorpion/
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
(canceled)
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
This is a repost because FTX messed the URLs up. I'll study up on FTX when I
have more time. Larry, can you please remove the previous post that matches
this one?
Man I love building with LEGO. It is such a relaxing and satisfying hobby.
I’ve got a leg/hip mechanism with three points of articulation. Here is a
picture of the expected sequences.
http://www.kclague.net/SSCorpion/ssclagorpion_seq.JPG
The top four pictures are the sequence for walking forward. The first two
pictures are the leg down striding from front to back. The last two pictures
show the leg recovering.
The bottom row of four are the sequence for walking sideways. The first to
pictures are the leg down, striding forward and sideways. The last two pictures
show the leg recovering.
Looking at the picture as columns, notice that the first and last columns are
identical. Only the middle two are different, when walking sideways, we’ll swap
the sideways articulation for the hip sweep articulation using pneumatic
multiplexors.
The middle articulation point has been improved so that the stresses and strains
are *not* going throught the switches.
Here are some individual pictures as well.
http://www.kclague.net/SSCorpion/P4210001.JPG
http://www.kclague.net/SSCorpion/P4210002.JPG
http://www.kclague.net/SSCorpion/P4210003.JPG
http://www.kclague.net/SSCorpion/P4210005.JPG
http://www.kclague.net/SSCorpion/P4210006.JPG
One thing to notice is that the actual direction of the sideways motion is going
to be forward and sideways or backard sideways, depending on the hip sweep
positioning. With two hip pistons we could have a three position hip sweep, but
this would be that much more *stuff*.
Obviously much of the design can be modified (mutated) for better looks.
Scorpion’s legs are much more of an arch shape, so rearranging the shape so that
the leg comes out of the hip going up, then curving back down will look more
realistic. I think that for sideways walking though, the last leg segment needs
to be veritcal.
Feedback?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
Wow, coolness. This is a good day! The leg is comming along nicely.
Kevin, thank you for posting your progress.
This is great.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | |
I just had a silly, yet kind of cool idea.
I'm not sure what you know about the Spybots, but if you have two Spybots, then
from Spybot A, you can tell the direction, distance, and orientation of Spybot
B. (yes, from A you can tell which direction B is facing, relative to A)
Also, it would be pretty easy to come up with a differential drive, motor
powered walker built around the body of a Spybot. So some additional Spybots
could be turned into baby scorpions. Actually, they kind of look like scorpions
in their natural state.
So, it wouldn't be hard to write a program and make a family that can follow
it's dad, SSClagorpion, and move in formation.
Imagine, one of them gets bumped, and they all attack!
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> So, it wouldn't be hard to write a program and make a family that can follow
> it's dad, SSClagorpion, and move in formation.
Oh, I *so* want to see this. I'll be the first to loan you a spybot for this
- if this project does get to this stage (and you find a gymnasium big enough),
I'd just love to see a video of you three walking into a room, tapping the
parent, and being mobbed by the kids ;-)
> Imagine, one of them gets bumped, and they all attack!
Kinda' like really extended senses. I do have this rather funny picture of
"Dad" calling the kids home, the the kids mobbing & tripping him...
--
Brian Davis
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> I just had a silly, yet kind of cool idea.
>
> I'm not sure what you know about the Spybots, but if you have two Spybots, then
> from Spybot A, you can tell the direction, distance, and orientation of Spybot
> B. (yes, from A you can tell which direction B is facing, relative to A)
>
> Also, it would be pretty easy to come up with a differential drive, motor
> powered walker built around the body of a Spybot. So some additional Spybots
> could be turned into baby scorpions. Actually, they kind of look like scorpions
> in their natural state.
>
> So, it wouldn't be hard to write a program and make a family that can follow
> it's dad, SSClagorpion, and move in formation.
>
>
> Imagine, one of them gets bumped, and they all attack!
>
>
> Steve
I have two gigamesh bodies floating around here somewhere.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> I have two gigamesh bodies floating around here somewhere.
Are you sure you guys aren't shilling for the Lego company? I've kind of avoided
Spybots as an unnecessary expense. Now I'm thinking of buying all 4.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Benton Jackson wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > I have two gigamesh bodies floating around here somewhere.
>
> Are you sure you guys aren't shilling for the Lego company? I've kind of avoided
> Spybots as an unnecessary expense. Now I'm thinking of buying all 4.
I'm quite sure I'm not getting anything from LEGO. On the contrary, LEGO has
been getting money from me.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > So, it wouldn't be hard to write a program and make a family that can follow
> > it's dad, SSClagorpion, and move in formation.
> >
> > Imagine, one of them gets bumped, and they all attack!
>
> I have two gigamesh bodies floating around here somewhere.
hmm. Here's an interesting idea. How many Spybots do you think we can get to
show up at Brickfest? :)
Talk about a big flock.... or swarm...
What do you call a group of scorpions?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > So, it wouldn't be hard to write a program and make a family that can follow
> > > it's dad, SSClagorpion, and move in formation.
> > >
> > > Imagine, one of them gets bumped, and they all attack!
> >
> > I have two gigamesh bodies floating around here somewhere.
>
>
> hmm. Here's an interesting idea. How many Spybots do you think we can get to
> show up at Brickfest? :)
>
> Talk about a big flock.... or swarm...
>
> What do you call a group of scorpions?
Scary.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> I just had a silly, yet kind of cool idea.
>
> I'm not sure what you know about the Spybots, but if you have two Spybots, then
> from Spybot A, you can tell the direction, distance, and orientation of Spybot
> B. (yes, from A you can tell which direction B is facing, relative to A)
>
> Also, it would be pretty easy to come up with a differential drive, motor
> powered walker built around the body of a Spybot. So some additional Spybots
> could be turned into baby scorpions. Actually, they kind of look like scorpions
> in their natural state.
>
> So, it wouldn't be hard to write a program and make a family that can follow
> it's dad, SSClagorpion, and move in formation.
>
>
> Imagine, one of them gets bumped, and they all attack!
>
>
> Steve
Actually I think in real life they would all climb the back of the mother.
<http://www.ub.ntnu.no/scorpion-files/a_australis3.jpg>
Now that will be a challenge to recreate in LEGO.
- David
| | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
...
> http://www.kclague.net/SSCorpion/P4210001.JPG
...
> Feedback?
>
> Kevin
I notice that the cylinder with the weight on it is the vertical one in the
middle, and that it's only a third of the way from the hip to the knee. Is one
cylinder going to be enough to support the weight (1/4 of the robot), given that
the force on the cylinder is now 3 times what it would be, by being so far from
the knee (3/4 the weight of the robot on 1 cylinder)? I think a check of the
pressure calculations would be prudent.
Mark
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> I’ve got a leg/hip mechanism with three points of articulation. Here is a
> picture of the expected sequences.
>
> http://www.kclague.net/SSCorpion/ssclagorpion_seq.JPG
>
> Feedback?
Like Mark said, there's going to be quite a bit of weight on the main cylinder.
That's where you're planning on having several cylinders to hold the weight,
right?
So, you're looking at about 5 per leg, 8 legs, or 40 cylinders? (plus other
logic stuff?)
And for switches, you have 6 per leg, or 48. Plus around 32 for
logic/direction? (at least 80 total) I think I skipped the forward/backward
switches. So the total is around 100? That's for forward/back + walk/turn +
walk/step-sideways. Oh, and one for stop/go.
Does that fit with what Eric is wanting (able) to do?
Steve
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > I've got a leg/hip mechanism with three points of articulation. Here is a
> > picture of the expected sequences.
> >
> > http://www.kclague.net/SSCorpion/ssclagorpion_seq.JPG
> >
> > Feedback?
>
>
> Like Mark said, there's going to be quite a bit of weight on the main cylinder.
> That's where you're planning on having several cylinders to hold the weight,
> right?
If we use 3 large cylinders each with an area of 0.2 square inches per leg, and
the expected force is 5 pounds per leg, then we get a required pressure of 8.3
pounds per square inch.
If we use two large cylinders, we'll need 12.5 pounds per square inch.
I think that three is better.
The leverage issue also indicates that we'd better not make the legs any longer,
because it just makes things worse as far as the number of pistons and the
pressure.
I guess if we wanted to make the legs longer, we can change the distance between
the piston(s) and the folcrum. I'll do some prototyping there.
The leg design then is the first constraint with respect to the overall size (or
scale) of SSClagorpion.
>
> So, you're looking at about 5 per leg, 8 legs, or 40 cylinders? (plus other
> logic stuff?)
40 weight bearing cylinders, plus two more large (four small cylinders) that are
provided for timing only.
> And for switches, you have 6 per leg, or 48. Plus around 32 for
> logic/direction? (at least 80 total) I think I skipped the forward/backward
> switches. So the total is around 100? That's for forward/back + walk/turn +
> walk/step-sideways. Oh, and one for stop/go.
Plus two for the timing only pistons.
>
> Does that fit with what Eric is wanting (able) to do?
Yes, this part count would even tax my pneumatic inventory. Currently I have
most of my pneumatics allocated to MOCs: two bipeds (12 pistons, 8 switches),
inchworm (7 pistons, 14 swtiches), hex242 (14 pistons, 26 switches), and PhD (24
pistons, 76 switches).
I have plenty of older style switches, 30 new switches, 10-12 small pistons, and
about 25 spare large pistons, that are currently unused. I love the 8455 and
bricklink! Plus I'm remaining employed, so I can afford more!
I'd guess that pneumatics is the one place where I've got Eric beat in
inventory, right Eric?
Eric, should I be using old switches or new switches? I'd bet I don't have
enough old switches to make the complete circuit.
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> Eric, should I be using old switches or new switches? I'd bet I don't have
> enough old switches to make the complete circuit.
I didn't see any comment from Eric about the proposed parts list. It's around
50 pistons, and 100 switches. Is that OK?
And, do we know how big this thing is, yet?
Also, I'm going to have to do the Spybot/family thing. We can try to get
everyone to bring their Spybots to Brickfest. They can be stock Spybots, which
kind of look like scorpions, or home-made walkers, or some cool walker design
that Kevin comes up with. (oh, btw Kevin, can you come up with a cool design
for a Spybot walker? :)
This plan doesn't require SSClagorpion to work. But the ideas will fit together
very nicely. I'll work on a plan next week...
Steve
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Eric, should I be using old switches or new switches? I'd bet I don't have
> > enough old switches to make the complete circuit.
>
>
>
> I didn't see any comment from Eric about the proposed parts list. It's around
> 50 pistons, and 100 switches. Is that OK?
>
> And, do we know how big this thing is, yet?
Dunno. I'm mulling around the leverage issue. I don't see why the feet should
have to rise more that the amount the piston expands/contracts. If I can figure
out how to make the leverage work (and pack it all in nicely), we could be back
to 8 vertical pistons, instead of 24.
>
>
>
> Also, I'm going to have to do the Spybot/family thing. We can try to get
> everyone to bring their Spybots to Brickfest. They can be stock Spybots, which
> kind of look like scorpions, or home-made walkers, or some cool walker design
> that Kevin comes up with. (oh, btw Kevin, can you come up with a cool design
> for a Spybot walker? :)
Uh, sure..... How many legs?
>
> This plan doesn't require SSClagorpion to work. But the ideas will fit together
> very nicely. I'll work on a plan next week...
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > And, do we know how big this thing is, yet?
>
> Dunno. I'm mulling around the leverage issue. I don't see why the feet should
> have to rise more that the amount the piston expands/contracts. If I can figure
> out how to make the leverage work (and pack it all in nicely), we could be back
> to 8 vertical pistons, instead of 24.
Considering the flex in the body/leg and the overall size/weight of this guy, it
may be good to raise it up a bit more. Maybe 2x the normal throw? With that in
mind, that still only 2/leg or 16.
> > (oh, btw Kevin, can you come up with a cool design
> > for a Spybot walker? :)
>
> Uh, sure..... How many legs?
I was thinking about a diff-drive walker that would be stable, no matter which
legs were up/down. I think that means it needs 8. Something simple, and this
is low priority.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Eric, should I be using old switches or new switches? I'd bet I don't have
> > enough old switches to make the complete circuit.
>
>
>
> I didn't see any comment from Eric about the proposed parts list. It's around
> 50 pistons, and 100 switches. Is that OK?
Hey guys, I'm standing by, forgive my absence.
I have the parts to contribute for structural things, the sheer amount of
switches and pistons are out of my range. I do have Rotation Sensors and greeble
doohickies.
I also have three Spybots.
> And, do we know how big this thing is, yet?
>
>
>
>
-Snip-
> Steve
e
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > I didn't see any comment from Eric about the proposed parts list. It's around
> > 50 pistons, and 100 switches. Is that OK?
>
> Hey guys, I'm standing by, forgive my absence.
>
> I have the parts to contribute for structural things, the sheer amount of
> switches and pistons are out of my range. I do have Rotation Sensors and greeble
> doohickies.
Ok, so how should we proceed? How many switches and pistons DO you have? We
could scale back the design to fit your inventory, or come up with another
solution.
We could all pitch in parts, but that will mean SSClagorpion will have a limited
life span. (somewhere beyond Brickfest)
Or we could take up a collection, and donate the parts.
Other posibilities?
> I also have three Spybots.
Good. :)
>
> > And, do we know how big this thing is, yet?
> >
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > I didn't see any comment from Eric about the proposed parts list. It's around
> > > 50 pistons, and 100 switches. Is that OK?
> >
> > Hey guys, I'm standing by, forgive my absence.
> >
> > I have the parts to contribute for structural things, the sheer amount of
> > switches and pistons are out of my range. I do have Rotation Sensors and greeble
> > doohickies.
>
>
> Ok, so how should we proceed? How many switches and pistons DO you have? We
> could scale back the design to fit your inventory, or come up with another
> solution.
I was under the impression that Kevin's supply of pnuematics were around 100
pistons and switches.
I have a small hand full of the new types and less than a dozen of the old type.
IMHO, that's why I orriginally wanted to create the Leg truss mechanically using
my parts as I can cover that presumably. Having 10 of more limbs with multiple
pistons and switches is a tall order. However, I would love to see how Kevin
would build the Scorpion legs pnematically. I could help in what ever way
possible.
However, we could divide the Legs into 3 and each of us could attempt to build a
set , there by shareing the load. Or we could ask for help from Lego, so long as
we use the project to raise awareness and promote advanced building techniques
that should be made public for all to use as a tool. Then maybe we could ask for
help. Our commitment must be solid to ask for assistance.
thoughts?
> We could all pitch in parts, but that will mean SSClagorpion will have a limited
> life span. (somewhere beyond Brickfest)
>
> Or we could take up a collection, and donate the parts.
>
> Other posibilities?
>
>
>
> > I also have three Spybots.
>
> Good. :)
>
> >
> > > And, do we know how big this thing is, yet?
I heard the space, castle, and train guys are going to give us all their
robotics elements. Or was that my inside voice?
Actually the RTL guys gab to much, let's take theirs, (gut jab....)
lol! If they take an interest in the overall community, maybe we'll give them
back...later much later.... j/k mode: off.
:p
e
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
-snip-
> I heard the space, castle, and train guys are going to give us all their
> robotics elements. Or was that my inside voice?
>
> Actually the RTL guys gab to much, let's take theirs, (gut jab....)
> lol! If they take an interest in the overall community, maybe we'll give them
> back...later much later.... j/k mode: off.
>
> :p
>
> e
Wait wait, I was poking fun and being a bit of a wise @$$, later I felt these
comments might have been in bad taste. My apologies if I was out of line.
e
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > > In lugnet.technic, Steve Hassenplug wrote:
> > > > I didn't see any comment from Eric about the proposed parts list. It's around
> > > > 50 pistons, and 100 switches. Is that OK?
> > >
> > > Hey guys, I'm standing by, forgive my absence.
> > >
> > > I have the parts to contribute for structural things, the sheer amount of
> > > switches and pistons are out of my range. I do have Rotation Sensors and greeble
> > > doohickies.
> >
> >
> > Ok, so how should we proceed? How many switches and pistons DO you have? We
> > could scale back the design to fit your inventory, or come up with another
> > solution.
>
> I was under the impression that Kevin's supply of pnuematics were around 100
> pistons and switches.
I know that I have at least 100 pistons, at at least twice that many switches.
I'll have to disassemble some projects to make them available. I'll want to
document caterpillar, and complete PhD before I disassemble it. After that no
problems.
>
> I have a small hand full of the new types and less than a dozen of the old type.
>
> IMHO, that's why I orriginally wanted to create the Leg truss mechanically using
> my parts as I can cover that presumably. Having 10 of more limbs with multiple
> pistons and switches is a tall order. However, I would love to see how Kevin
> would build the Scorpion legs pnematically. I could help in what ever way
> possible.
I encourage each of you to prototype the pneumatic leg designs. Each degree of
freedom requires two switches for instrumentation. The critical skill I provide
is how to design and hook together all the switches and pistons into a
sequencer. You are both highly skilled builders of mechanical devices,
equalling or bettering my mechanical skills.
>
> However, we could divide the Legs into 3 and each of us could attempt to build a
> set , there by shareing the load. Or we could ask for help from Lego, so long as
> we use the project to raise awareness and promote advanced building techniques
> that should be made public for all to use as a tool. Then maybe we could ask for
> help. Our commitment must be solid to ask for assistance.
I'm totally committed to finishing the project in plenty of time for BrickFest.
>
> thoughts?
>
>
>
> > We could all pitch in parts, but that will mean SSClagorpion will have a limited
> > life span. (somewhere beyond Brickfest)
I think we'll have to start here, and possibly recreate it later when a
benefactor gives us the parts we need to make a duplicate.
> >
> > Or we could take up a collection, and donate the parts.
> >
> > Other posibilities?
> >
> >
> >
> > > I also have three Spybots.
> >
> > Good. :)
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> I know that I have at least 100 pistons, at at least twice that many switches.
> I'll have to disassemble some projects to make them available. I'll want to
> document caterpillar, and complete PhD before I disassemble it. After that no
> problems.
Ok, I think we just need to proceed with the full-blown plan, and worry about
where the parts are coming from later. (maybe it was just me that was thinking
about that)
I've just wrapped up a local event, and am ready to focus a great deal more on
this.
We have several parts/sections that need to be built, and tasks to complete.
Let me start the list, and tell me if I missed anything:
Body: holds 2 RCXs, 1 Spybot, 1 compressor, a bunch of switches, and has
mounting points for 8 legs, 2 arms, 1 tail, and a head (which may be built in).
What shape is the body? Is it oval or rectangle? I think Eric has chosen to
work on this piece.
8 legs. All are the same with 3 degrees of movement, up/down, forward/back,
in/out (at the foot). oops, 2 have touch sensors for floor detection. Do these
need feet? I guess that's up to Eric (snot)
2 arms. The same but flipped. Pneumatic claws & touch sensors.
tail. Extend/curl. move side-to-side?
control switches & switch motors - Kevin
snot - Eric
Spybot/RCX logic - Steve
Spybot swarm to follow this big daddy around - Steve
Is that it?
It looks like the legs and/or the body will determine the scale.
I'm going to mess around with some leg geometry. Kevin, do you have anything
posted that shows distances for cylinders & switches? (how to mount a cylinder
to flip a switch)
Steve
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I know that I have at least 100 pistons, at at least twice that many switches.
> > I'll have to disassemble some projects to make them available. I'll want to
> > document caterpillar, and complete PhD before I disassemble it. After that no
> > problems.
>
>
>
> Ok, I think we just need to proceed with the full-blown plan, and worry about
> where the parts are coming from later. (maybe it was just me that was thinking
> about that)
>
> I've just wrapped up a local event, and am ready to focus a great deal more on
> this.
>
>
> We have several parts/sections that need to be built, and tasks to complete.
> Let me start the list, and tell me if I missed anything:
>
> Body: holds 2 RCXs, 1 Spybot, 1 compressor, a bunch of switches, and has
> mounting points for 8 legs, 2 arms, 1 tail, and a head (which may be built in).
> What shape is the body? Is it oval or rectangle? I think Eric has chosen to
> work on this piece.
>
> 8 legs. All are the same with 3 degrees of movement, up/down, forward/back,
> in/out (at the foot). oops, 2 have touch sensors for floor detection. Do these
> need feet? I guess that's up to Eric (snot)
>
> 2 arms. The same but flipped. Pneumatic claws & touch sensors.
>
> tail. Extend/curl. move side-to-side?
>
> control switches & switch motors - Kevin
>
> snot - Eric
>
> Spybot/RCX logic - Steve
>
> Spybot swarm to follow this big daddy around - Steve
>
>
>
> Is that it?
>
> It looks like the legs and/or the body will determine the scale.
>
> I'm going to mess around with some leg geometry. Kevin, do you have anything
> posted that shows distances for cylinders & switches? (how to mount a cylinder
> to flip a switch)
Steve,
I have lots of example geometries on brickshelf:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=44968
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=48796
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=45669
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
Kevin
>
> Steve
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> > I'm going to mess around with some leg geometry. Kevin, do you have anything
> > posted that shows distances for cylinders & switches? (how to mount a cylinder
> > to flip a switch)
>
> Steve,
>
> I have lots of example geometries on brickshelf:
>
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=44968
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=48796
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=45669
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
Two questions. First, do you have a picture like this for an old style switch?
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=534951
I assume the geometry of the switch lever is about the same.
Second, this reversable motor looks good. Can we use that to walk?
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=427353
Given the choice of running a motor to flip 16 switches, or running a motor to
spin this worm gear box, it seems like it would be easier to have 3 of these,
than ... what was that, about 48 switches? (for forward/back, turn, side-side)
And, I think it would be equally, or even more cool.
Steve
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > > I'm going to mess around with some leg geometry. Kevin, do you have anything
> > > posted that shows distances for cylinders & switches? (how to mount a cylinder
> > > to flip a switch)
> >
> > Steve,
> >
> > I have lots of example geometries on brickshelf:
> >
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=44968
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=48796
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=45669
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
>
>
> Two questions. First, do you have a picture like this for an old style switch?
> http://www.brickshelf.com/cgi-bin/gallery.cgi?i=534951
>
> I assume the geometry of the switch lever is about the same.
I do in my "Mindstorms Masterpieces" book, but I don't have any on-line.
It is similar, except that the pivot point of the old switch is lower.
>
>
> Second, this reversable motor looks good. Can we use that to walk?
> http://www.brickshelf.com/cgi-bin/gallery.cgi?i=427353
>
> Given the choice of running a motor to flip 16 switches, or running a motor to
> spin this worm gear box, it seems like it would be easier to have 3 of these,
> than ... what was that, about 48 switches? (for forward/back, turn, side-side)
Nope. SSClagorpion does not walk using a simple pneumatic motor configuration.
>
> And, I think it would be equally, or even more cool.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
>
> Nope. SSClagorpion does not walk using a simple pneumatic motor configuration.
I just came up with an idea for how to make the legs work. It should make it so
the pneumatic cylinder doesn't have to support the weight of the creature.
The idea is to have the legs "lock" into place, when they are down.
Think about the legs for a folding table. They lock into place, so they can not
fold back. It wouldn't take much pneumatic pressure to keep them locked.
Given that the body will not bounce as it walks, then, when the legs are down,
the body is supported by all eight legs. At that point, four legs are locked,
and the other four are unlocked, moved, and locked again. {repeat with other
set}
So, the cylinder only has to flip the switch(s), hold the leg locked in place,
and lift the weight of the leg when it's unlocked, but it won't have to support
any weight from the body.
With this configuration, it shouldn't matter how heavy SSClagorpion is, or how
long the legs are, because the cylinder is only moving the leg. And, this
method wouldn't work, if it weren't for Kevin's 242 design.
I plan to make some kind of model tonight to show what I'm talking about.
Can anyone tell me if/why that won't work?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
>
> I just came up with an idea for how to make the legs work. It should make it so
> the pneumatic cylinder doesn't have to support the weight of the creature.
Now, I have a question about the "logic" behind walking sideways. When
SSClagorpion is done walking sideways, and it starts walking forward, will the
legs all be in the same position in/out, or will 1/2 be in, while 1/2 are out?
Assuming the legs start at vertical, and push out to walk sideways, is there
ever a time when all legs are vertical, or will that require even more switches?
Right now, there will be a time when all legs are down, but they are not
required to be vertical, I think.
When walking forward/back, there will be a time when all legs are straight out
from the body, but they will never be stopped in that postion. They can only be
stopped (reliably) when they are forward, or back, right?
Same with in/out. They "could" be stopped at 1/2 way, but not reliably, and
that would not be vertical.
This could make walking kind of funky.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > I just came up with an idea for how to make the legs work. It should make it so
> > the pneumatic cylinder doesn't have to support the weight of the creature.
>
>
> Now, I have a question about the "logic" behind walking sideways. When
> SSClagorpion is done walking sideways, and it starts walking forward, will the
> legs all be in the same position in/out, or will 1/2 be in, while 1/2 are out?
Below is a diagram of the 8 legs as one of the two points where all eight feet
are down.
A\_
\B
_/D
C/
E\_
\F
_/H
G/
Assuming that all the hips sweeps are the same, for example compressed means
swept backwards, and expanded means swept forward, then....
Hip pistons A, D, E, and H start out expanded and
hip pistons B, C, F, and G start out contracted.
Also assuming that contracted sideways pistons means feet away from body, and
expended sideways pistons means feet closer to the body.....
In normal walking we expect that the sideways walking leg pistons will be all
expanded. When we switch to sideways walking, we subsititute sideways sweep for
hip sweep. We leave the hips as they are, and then drive the sidways pistons.
This means that D and H sidways pistons will expand. As we progress through the
sequence, we see the legs go up, sideways walking change, legs go doen, sideways
walking change. Given the hip orientation shown above, the sideways walking
would be forward/left for A,D,E and H, and backward/left for B, C, F, and G.
When we decide to switch back to forward/backward walking we'll have to contract
all the sideways pistons, and start driving the hip pistons again.
>
> Assuming the legs start at vertical, and push out to walk sideways, is there
> ever a time when all legs are vertical, or will that require even more switches?
> Right now, there will be a time when all legs are down, but they are not
> required to be vertical, I think.
Hmmm..... Did you look at this sequence?
http://www.kclague.net/SSCorpion/ssclagorpion_seq.JPG
I think that the legs are *never* statically vertical. They are either swept
out, or in. The sweep needs to be symmetric between "in to out" transitions and
"out to in" transitions, When walking left, the power stroke for the legs on
the left side of the body are "out to in", and the power stroke for the legs on
the right side of the body are "in to out". Because of this, both sweeps need
to be of equal length.
Also vertical component of the sideways part of the leg needs to be the same at
either limit, otherwise you are creating a gravity well.
In the image shown above, notice the two extremes of the third degree of freedom
are mirrors of each other? This avoids gravity wells.
>
> When walking forward/back, there will be a time when all legs are straight out
> from the body, but they will never be stopped in that postion. They can only be
> stopped (reliably) when they are forward, or back, right?
Correct, unless we double the number of pistons for leg sweep.
>
> Same with in/out. They "could" be stopped at 1/2 way, but not reliably, and
> that would not be vertical.
Why is vertical so critical? Isn't it sufficient that the feet are out as far
as they can get? Vertical is not needed for your "leg lock" strategy.
>
> This could make walking kind of funky.
The two sequences in the image above never assume that the leg is vertical.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> A\_
> \B
>
> _/D
> C/
>
>
> E\_
> \F
>
> _/H
> G/
...
> In normal walking we expect that the sideways walking leg pistons will be all
> expanded. When we switch to sideways walking, we subsititute sideways sweep for
> hip sweep.
...
>
> When we decide to switch back to forward/backward walking we'll have to contract
> all the sideways pistons, and start driving the hip pistons again.
Will it be possible to expand or contract all sideways walking pistons at the
same time?
Or is that like walking forward, where 1/2 will be expanded, while the other 1/2
are contracted?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > A\_
> > \B
> >
> > _/D
> > C/
> >
> >
> > E\_
> > \F
> >
> > _/H
> > G/
>
> ...
> > In normal walking we expect that the sideways walking leg pistons will be all
> > expanded. When we switch to sideways walking, we subsititute sideways sweep for
> > hip sweep.
>
> ...
> >
> > When we decide to switch back to forward/backward walking we'll have to contract
> > all the sideways pistons, and start driving the hip pistons again.
>
>
> Will it be possible to expand or contract all sideways walking pistons at the
> same time?
>
> Or is that like walking forward, where 1/2 will be expanded, while the other 1/2
> are contracted?
Looking at SSClagorpion from the front........ and only looking at one of the
two leg groups:
__
/ / Down
__
\ \ Down
__
\ \ Up
__
/ / Up
In this case we'll need to have half the sidways pistons expanded and half
contracted all the time. Otherwise all the legs will thrust away from the body
and then back. Right?
__
/ \ Down
__
\/ Down
__
/ \ Up
__
\/ Up
This scenario does not lead to walking, right?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > >
> > > In normal walking we expect that the sideways walking leg pistons will be all
> > > expanded. When we switch to sideways walking, we subsititute sideways sweep for
> > > hip sweep.
> >
> >
> > Will it be possible to expand or contract all sideways walking pistons at the
> > same time?
>
>
> Looking at SSClagorpion from the front........ and only looking at one of the
> two leg groups:
> __
> / / Down
> __
> \ \ Down
> __
> \ \ Up
> __
> / / Up
>
> In this case we'll need to have half the sidways pistons expanded and half
> contracted all the time. Otherwise all the legs will thrust away from the body
> and then back. Right?
Right. I think. So, where (side to side) will the legs be when it's walking
forward?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
> > > >
> > > > In normal walking we expect that the sideways walking leg pistons will be all
> > > > expanded. When we switch to sideways walking, we subsititute sideways sweep for
> > > > hip sweep.
> > >
> > >
> > > Will it be possible to expand or contract all sideways walking pistons at the
> > > same time?
> >
> >
> > Looking at SSClagorpion from the front........ and only looking at one of the
> > two leg groups:
> > __
> > / / Down
> > __
> > \ \ Down
> > __
> > \ \ Up
> > __
> > / / Up
> >
> > In this case we'll need to have half the sidways pistons expanded and half
> > contracted all the time. Otherwise all the legs will thrust away from the body
> > and then back. Right?
>
> Right. I think. So, where (side to side) will the legs be when it's walking
> forward?
Like this:
__
/ \
So when we stop walking sideways, we have to force all the sidewalking pistons
to expand. You said this didn't you.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> - snip - hips sweeps - snip -
huh huh they said "hip sweeps", I love this project.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> Below is a diagram of the 8 legs as one of the two points where all eight feet
> are down.
>
> A\_
> \B
>
> _/D
> C/
>
>
> E\_
> \F
>
> _/H
> G/
slight problem.
When SSClagorpion is walking sideways, due to the LEG SWEEP the legs will be
positioned as show above. However, when he takes a step left, legs A, B, E & F
would be stepping forward(up)/left and C,D,G & H are stepping
backward(down)/left.
This could be a problem.
For a smooth step sideways, the forward/backward LEG SWEEP would have to be
stopped in mid step (not possible).
Thoughts?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Below is a diagram of the 8 legs as one of the two points where all eight feet
> > are down.
> >
> > A\_
> > \B
> >
> > _/D
> > C/
> >
> >
> > E\_
> > \F
> >
> > _/H
> > G/
>
>
> slight problem.
>
> When SSClagorpion is walking sideways, due to the LEG SWEEP the legs will be
> positioned as show above. However, when he takes a step left, legs A, B, E & F
> would be stepping forward(up)/left and C,D,G & H are stepping
> backward(down)/left.
>
> This could be a problem.
All along, I'd thought that it would zig/zag as it walks sideways, as you've
noted. But I was wrong. A, D, E and H are in one leg group. This means that
A, and E are walking forward/left, and D and H are walking backard/left. This
means that the legs are causing stress on each other, pulling each other in the
opposite directions.
>
> For a smooth step sideways, the forward/backward LEG SWEEP would have to be
> stopped in mid step (not possible).
>
> Thoughts?
My first thought is to forgo sideways walking.
A second thought is to fix the leg opposition problem described above, by having
the legs doing this:
A\_
\B
C\_
\D
E\_
\F
G\_
\H
And walk diagonally forward all the time, combined with this
_/B
A/
_/D
C/
_/F
E/
_/H
G/
providing diagonally backward all the time.
This means that it would be able to walk in six directions, instead of 4, at the
cost of 8 switches.
If pure sideways walking is truly desirable, then we can modify the hip sweep so
that it uses two pistons.
The two pistons are joined base to base. Normally both pistons mimic each
other. They both expand at the same time. They both expand at the same time.
To make the legs rest at the halfway point, you simply make one of the pistons
do the opposite of the other.
This costs us 8 more pistons, and 8 more switches.
Feedback?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> My first thought is to forgo sideways walking.
>
>
...
> This means that it would be able to walk in six directions, instead of 4, at the
> cost of 8 switches. • ...
>
> This costs us 8 more pistons, and 8 more switches.
How about if you make up a proposal? Actually, two.
First, get out your pen, paper, calculator, sliderule, and excel spreadsheet,
and figure out how many pistons & switches are required.
I'd suggest two options:
A) No Sideways. Forward/back, turn in place R or L
B) Straight sideways. two pistons/LEG SWEEP.
Count EVERYTHING. What is the grand total?
While I think walking sideways would be very cool, I also think it will add a
ton of complexity to this thing. In addition to the set of walking
switches/pistons, we'd need to have switches to set the legs to "out" when it's
not walking sideways, and we'd need switches to set the legs to "middle" when
not walking forward/back.
I'm really starting to think it will top 100 switches.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > My first thought is to forgo sideways walking.
> >
> >
> ...
> > This means that it would be able to walk in six directions, instead of 4, at the
> > cost of 8 switches. ...
> >
> > This costs us 8 more pistons, and 8 more switches.
>
>
>
> How about if you make up a proposal? Actually, two.
>
> First, get out your pen, paper, calculator, sliderule, and excel spreadsheet,
> and figure out how many pistons & switches are required.
I used my brain.....
>
> I'd suggest two options:
> A) No Sideways. Forward/back, turn in place R or L
leg_cost = 2 pistons, 4 switches
n_legs = 8
legs_cost = 8(2 pistons, 4 switches)
= 16 pistons, 32 switches
timing_cost = 2 pistons, 2 switches
reverse_cost = 8 switches
turn_cost = 8 switches
total_cost = legs_cost + timing_cost + reverse_cost + turn_cost =
16 pistons + 32 switches +
2 pistons + 2 switches +
8 switches +
8 switches
= 18 pistons + 50 switches
> B) Straight sideways. two pistons/LEG SWEEP.
leg_cost = 4 pistons + 8 switches
n_legs = 8
legs_cost = 8(4 pistons, 8 switches)
= 32 + 64
timing_cost = 2 pistons + 2 switches
reverse_cost = 8 switches
turn_cost = 8 switches
half_sweep_cost = 8 switches
sideways_step_cost = 16 switches
total_cost = legs_cost + timing_cost + reverse_cost + turn_cost +
half_sweep_cost + sideways_step_cost
= 32 pistons + 64 switches +
2 pistons + 2 switches +
8 switches +
8 switches +
8 switches +
16 switches
= 34 pistons + 106 switches
>
> Count EVERYTHING. What is the grand total?
>
> While I think walking sideways would be very cool, I also think it will add a
> ton of complexity to this thing. In addition to the set of walking
> switches/pistons, we'd need to have switches to set the legs to "out" when it's
> not walking sideways, and we'd need switches to set the legs to "middle" when
> not walking forward/back.
It looks like sideways makes it more than twice the cost, both in pistons and
switches.
>
> I'm really starting to think it will top 100 switches.
You are correct.
>
> Steve
C) staggered sideways walking
leg_cost = 3 pistons + 6 switches
n_legs = 8
legs_cost = 8(3 pistons, 6 switches)
= 24 pistons + 48 switches
timing_cost = 2 pistons + 2 switches
reverse_cost = 8 switches
turn_cost = 8 switches
sideways_hip_change = 8 switches
sideways_out_force = 8 switches
hip_sidways_swap = 8 switches
sideways_step_cost = sideways_hip_change + sideways_force_out +
hip_sideways_swap
= 8 switches + 8 switches + 8 switches
= 24 switches
total_cost = legs_cost + timing_cost + reverse_cost + turn_cost +
half_sweep_cost + sideways_step_cost
= 24 pistons + 48 switches +
2 pistons + 2 switches +
8 switches +
8 switches +
24 switches
= 24 pistons + 90 switches
In summary:
A) Forwards/backwards/turning 18 pistons and 52 switches
B) +sideways walking 34 pistons and 106 switches
C) six direction walking 24 pistons and 90 switches
I'm fine with (*just* :^) forwards/backards/turning at 18 pistons and 52
switches, and deferring sideways walking to a future model.
As a point of reference, PhD (my most advanced hexapod) has 14 pistons and 76
switches, and will be able to walk 6 directions and turn. It can do all that
because the body is radially symmetric. The down side is that the legs *do*
cause stress on each other.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > First, get out your pen, paper, calculator, sliderule, and excel spreadsheet,
> > and figure out how many pistons & switches are required.
>
> I used my brain.....
hmm. I didn't think about doing that. :)
> > A) No Sideways. Forward/back, turn in place R or L
>
> total_cost = legs_cost + timing_cost + reverse_cost + turn_cost =
> = 18 pistons + 50 switches
>
> > B) Straight sideways. two pistons/LEG SWEEP.
>
> leg_cost = 4 pistons + 8 switches
>
> n_legs = 8
>
> legs_cost = 8(4 pistons, 8 switches)
> = 32 + 64
>
> timing_cost = 2 pistons + 2 switches
>
> reverse_cost = 8 switches
>
> turn_cost = 8 switches
>
> half_sweep_cost = 8 switches
>
> sideways_step_cost = 16 switches
>
> total_cost = legs_cost + timing_cost + reverse_cost + turn_cost +
> half_sweep_cost + sideways_step_cost
> = 32 pistons + 64 switches +
> 2 pistons + 2 switches +
> 8 switches +
> 8 switches +
> 8 switches +
> 16 switches
> = 34 pistons + 106 switches
Does that include the sideways_out_force? It may be about 8 switches short.
But I don't think that matters.
> > While I think walking sideways would be very cool, I also think it will add a
> > ton of complexity to this thing.
> I'm fine with (*just* :^) forwards/backards/turning at 18 pistons and 52
> switches, and deferring sideways walking to a future model.
Yes. I'm fine with that, also. Eric?
>
> In summary:
> A) Forwards/backwards/turning 18 pistons and 52 switches
> B) +sideways walking 34 pistons and 106 switches
> C) six direction walking 24 pistons and 90 switches
Looking at the totals on top, I think A) should be 50 switches, plus an on/off
switch (for stopping), right?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > total_cost = legs_cost + timing_cost + reverse_cost + turn_cost +
> > half_sweep_cost + sideways_step_cost
> > = 32 pistons + 64 switches +
> > 2 pistons + 2 switches +
> > 8 switches +
> > 8 switches +
> > 8 switches +
> > 16 switches
> > = 34 pistons + 106 switches
>
>
> Does that include the sideways_out_force? It may be about 8 switches short.
> But I don't think that matters.
Hey in case you guys are interested the 8455 is currently on sale in aus
(again!!) for about US$75 plus shipping ;)
ROSCO
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Ross Crawford wrote:
> Hey in case you guys are interested the 8455 is currently on sale in aus
> (again!!) for about US$75 plus shipping ;)
It's been on sale for US$79.95 from the US site for a few weeks now. If you're
going to follow along at home on this project, order a bunch now. Sounds like
you'll need a lot!
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Benton Jackson wrote:
> If you're
> going to follow along at home on this project, order a bunch now. Sounds like
> you'll need a lot!
I think eight backhoes will be enough. :)
And, the bucket on back may make a good claw...
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Benton Jackson wrote:
> > If you're
> > going to follow along at home on this project, order a bunch now. Sounds like
> > you'll need a lot!
>
> I think eight backhoes will be enough. :)
Maybe. Maybe not!
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > I'm fine with (*just* :^) forwards/backards/turning at 18 pistons and 52
> > switches, and deferring sideways walking to a future model.
>
>
> Yes. I'm fine with that, also. Eric?
About the sideways walking motion.
1. It would be cool.
2. Can Kevin include this without a major redesign?
3. Can we approximate the same intended direction through alternate or standard
locomotion?
4. The sideways motion makes for an interesting frame. A set of wish bones where
the main frame rail sits. Very cool to imagine.
5. Kevin, do what you see is prudent to get the walking logic down, give or take
additional articulation points.
6. A fourth set of pistons and switches to create the sideways crawl, would be
great. Both in terms of the frame, and in looking very cool in a complex way.
7. Why am I counting?
8. If a new upper-most Leg connection were to be built, I would insist on the
leg tips/feet, be bent inwards at the bottom to be under or closer to the body
for stability.
9. Or keep it as is if it will keep you head from exploding.
10. 10's a charm.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Nope. SSClagorpion does not walk using a simple pneumatic motor configuration.
>
>
>
> I just came up with an idea for how to make the legs work. It should make it so
> the pneumatic cylinder doesn't have to support the weight of the creature.
>
> The idea is to have the legs "lock" into place, when they are down.
I like this idea a lot. It sounds very good to me.
>
> Think about the legs for a folding table. They lock into place, so they can not
> fold back. It wouldn't take much pneumatic pressure to keep them locked.
>
> Given that the body will not bounce as it walks, then, when the legs are down,
> the body is supported by all eight legs. At that point, four legs are locked,
> and the other four are unlocked, moved, and locked again. {repeat with other
> set}
>
> So, the cylinder only has to flip the switch(s), hold the leg locked in place,
> and lift the weight of the leg when it's unlocked, but it won't have to support
> any weight from the body.
>
> With this configuration, it shouldn't matter how heavy SSClagorpion is, or how
> long the legs are, because the cylinder is only moving the leg. And, this
> method wouldn't work, if it weren't for Kevin's 242 design.
I agree. Very cool.
>
>
> I plan to make some kind of model tonight to show what I'm talking about.
>
> Can anyone tell me if/why that won't work?
Assymetry in the leg length might make some legs hold more weight than others,
making it harder to lock.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
Hey wow, I see it now. When I sit down to build, I'll work with this in mind.
Good one.
e
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > Nope. SSClagorpion does not walk using a simple pneumatic motor configuration.
>
>
>
> I just came up with an idea for how to make the legs work. It should make it so
> the pneumatic cylinder doesn't have to support the weight of the creature.
>
> The idea is to have the legs "lock" into place, when they are down.
This eliminates the concerns about piston leverage for putting the feet down and
keeping them weight bearing.
This allows us to have the legs be longer, more like a real scorpion, but this
brings us to the next leverage problem: Forward/Backwards sweep. The longer
the leg, the farther the body travels in a leg sweep, but this is probably at
the expense of speed given the leverage issue, right?
So what kind of leverage ratios should we use?
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > >
> > > Nope. SSClagorpion does not walk using a simple pneumatic motor configuration.
> >
> >
> >
> > I just came up with an idea for how to make the legs work. It should make it so
> > the pneumatic cylinder doesn't have to support the weight of the creature.
> >
> > The idea is to have the legs "lock" into place, when they are down.
>
> This eliminates the concerns about piston leverage for putting the feet down and
> keeping them weight bearing.
Here's a quick example of what I'm talking about.
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock1.jpg
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock2.jpg
Looks like it will work.
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> Here's a quick example of what I'm talking about.
>
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock1.jpg
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock2.jpg
>
> Looks like it will work.
It might not work quite as well as you seem to think. Locking mechanisms of the
sort that you're considering have a little "pop" because they don't lock at
their point of greatest extension. In order to get the leg to lock into
position, it actually has to settle a little bit so the weight prevents the
armature from swinging back into its original position by pulling it in the
opposite direction. Additionally, the legs will probably have a certain amount
of flex when supporting the full weight of this behemoth, so the four moving
legs will actually have to lift the weight entirely off the four locked legs
just as they are shifting into the locked position themselves. Immediately
afterwards, the other four legs will then have to take all the weight back as
they push out of the locked position and pop past the fully extended position,
where the two short struts attached to the cylinder shaft are perfectly lined up
with each other.
Sure, the cylinders won't have to support the weight the entire time, but they
will need to have enough strength to lift it for brief periods. Now, if I
remember my high school physics correctly, the closer the two beams get to being
perfectly parallel, the more leverage you've got to work with, so it's possible
that it won't matter. However, you might also find that any system strong
enough to pop the locks on the legs will be strong enough that it doesn't need
them to begin with. Once you've come up with a leg design that you're happy
with, it might be worth putting together a prototype rig just to test how much
weight it can handle. All you'd need are the basic leg designs with all the
cylinders piped to a simple throw switch (it doesn't need to walk, as long as it
can manage the locking/unlocking parts of the leg movement cycle), and a central
platform that you can set weights on.
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, David Laswell wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> - snip - It might not work - snip -
huh huh he said "It might not work..." I love this project.
e
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, David Laswell wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > Here's a quick example of what I'm talking about.
> >
> > http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock1.jpg
> > http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock2.jpg
> >
> > Looks like it will work.
>
> It might not work quite as well as you seem to think. Locking mechanisms of the
> sort that you're considering have a little "pop" because they don't lock at
> their point of greatest extension.
I thought about this. The two pieces that "lock" don't need to go beyond their
point of greatest extension. The reason for going beyond the PoGE is to lock,
so nothing else is required to hold it in place.
However the pneumatic piston will be holding it in place (keeping it locked).
As long as the braces are in line, there is very little force on the piston.
Also, I'm pretty sure, as you said, the piston has the most leverage on the
braces (and the whole leg assembly) when it's close to locking. So if it does
have to lift any weight, because of flex in the other legs, that's the best
time.
The joint will be weakest when the leg is at it's highest point off the ground,
but there, it's only lifting the weight of the leg.
This is easy to see with the assembly I made, because the legs travel very
little distance, as the piston approaches the bottom of it's throw, but they
move a great deal when it's at the top (extended, in the picture).
Thanks for helping think this through.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
Here is my first attempt at a locking leg, locked in the down position.
http://www.kclague.net/SSCorpion/P5020134.JPG
Here is the leg lifted off the ground:
http://www.kclague.net/SSCorpion/P5020135.JPG
Here is the leg down, with the sidewalking piston contracted.
http://www.kclague.net/SSCorpion/P5020136.JPG
The lock mechanism allows for a much more reasonable leg size. It is also
easier to fit together given that there is only one piston involved in the lock
mechamism.
Obviously, the sideways piston needs to be instrumented, and the "hip sweep"
piston needs to be added and instrumented.
> I thought about this. The two pieces that "lock" don't need to go beyond their
> point of greatest extension. The reason for going beyond the PoGE is to lock,
> so nothing else is required to hold it in place.
Compressing the lock piston does not go past the lowest point of foot drop.
> Thanks for helping think this through.
> Steve
Yes, thanks.
Feedback?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> I thought about this. The two pieces that "lock" don't need to go beyond
> their point of greatest extension. The reason for going beyond the PoGE is
> to lock, so nothing else is required to hold it in place.
>
> However the pneumatic piston will be holding it in place (keeping it locked).
> As long as the braces are in line, there is very little force on the piston.
So what happens if one set of legs manages to lock, but doesn't want to unlock,
while the other set of legs never locks at all? It's possible that the
front/back leg pairs will behave differently if the back legs are longer like on
a real scorpion.
> Also, I'm pretty sure, as you said, the piston has the most leverage on the
> braces (and the whole leg assembly) when it's close to locking. So if it
> does have to lift any weight, because of flex in the other legs, that's the
> best time.
It's less because of flex in the legs (if one set of legs flexes, the other set
should as well) than it is because a locked pair of legs will be slightly less
extended than a pair that's just about to lock or unlock, which means the weight
will transfer over to the walking legs just before they stop walking and again
just after they start walking.
Exactly when do the stationary legs switch over to walking legs? Do the
previous walking legs have to fully settle into "stationary" position, or is
there a slight transition phase where the one set is just about to complete its
walking cycle as the next set begins its own?
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, David Laswell wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > I thought about this. The two pieces that "lock" don't need to go beyond
> > their point of greatest extension. The reason for going beyond the PoGE is
> > to lock, so nothing else is required to hold it in place.
> >
> > However the pneumatic piston will be holding it in place (keeping it locked).
> > As long as the braces are in line, there is very little force on the piston.
>
> So what happens if one set of legs manages to lock, but doesn't want to unlock,
> while the other set of legs never locks at all? It's possible that the
> front/back leg pairs will behave differently if the back legs are longer like on
> a real scorpion.
If things do not want to unlock, the entire walking sequence stops. The whole
walking sequence requires that each set of pistons in turn completely transition
from closed to open, or open to closed.
>
> > Also, I'm pretty sure, as you said, the piston has the most leverage on the
> > braces (and the whole leg assembly) when it's close to locking. So if it
> > does have to lift any weight, because of flex in the other legs, that's the
> > best time.
>
> It's less because of flex in the legs (if one set of legs flexes, the other set
> should as well) than it is because a locked pair of legs will be slightly less
> extended than a pair that's just about to lock or unlock, which means the weight
> will transfer over to the walking legs just before they stop walking and again
> just after they start walking.
>
> Exactly when do the stationary legs switch over to walking legs? Do the
> previous walking legs have to fully settle into "stationary" position, or is
> there a slight transition phase where the one set is just about to complete its
> walking cycle as the next set begins its own?
Transitions happen when the switches of the pistons that are changing let
pressure from the center port to one of the two output ports.
In this particular scenario, the walking legs extend to the floor, causing a
timing piston/switch to change state. The timing piston does not represent a
muscle in the body like the pistons in the legs and hips. It is merely needed
to provide the correct sequence of the overall circuit. When the timing piston
finishes transitioning, then the legs that were stationary become the walking
legs.
Yes, the walking legs have to become stationary before the timing piston changes
state. The delay of the timing piston also helps assure that the walking legs
have had time to settle into stationary positions.
Before quad242 could actually walk, I had problems with races between the
walking legs becoming stationary and the stationary legs becoming walking. I
tried all kinds of boolean logic tricks to kill the races, but they didn't work.
In the end, I added the timing pistons (one per leg group) to act as race
killers.
Traditional pneumatic circuit designs have a central timing circuit which
controls the muscle pistons. The muscle pistons are uninstrumented and it is
assumed that they will expand/contract at similar enough rates to make things
work. This can lead to assymetries in the actuations of the muscle pistons,
because no two pistons expand/contract at the same rate.
My pneumatic designs use the muscle pistons as the timing pistons whenever
possible. This means that if four pistons are to change at the same time (as in
the case of putting the walking legs down), the transition is not complete until
leg1 and leg2 and leg3 and leg4 have completed the transition. Only then is
pressure applied to the next piston(s) in the sequence. The whole thing depends
on when the switches say the pistons are expanded/contracted vs. when the
pistons are actually expanded or contracted.
In this case, the accuracy of "actual lock" vs. "lock acquired" as indicated by
the switches is the issue. I'm certain there is a margin of error there, but
hopefully it will be negligable.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, David Laswell wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > I thought about this. The two pieces that "lock" don't need to go beyond
> > > their point of greatest extension. The reason for going beyond the PoGE is
> > > to lock, so nothing else is required to hold it in place.
> > >
> > > However the pneumatic piston will be holding it in place (keeping it locked).
> > > As long as the braces are in line, there is very little force on the piston.
> >
> > So what happens if one set of legs manages to lock, but doesn't want to unlock,
> > while the other set of legs never locks at all? It's possible that the
> > front/back leg pairs will behave differently if the back legs are longer like on
> > a real scorpion.
>
> If things do not want to unlock, the entire walking sequence stops. The whole
> walking sequence requires that each set of pistons in turn completely transition
> from closed to open, or open to closed.
>
> >
> > > Also, I'm pretty sure, as you said, the piston has the most leverage on the
> > > braces (and the whole leg assembly) when it's close to locking. So if it
> > > does have to lift any weight, because of flex in the other legs, that's the
> > > best time.
> >
> > It's less because of flex in the legs (if one set of legs flexes, the other set
> > should as well) than it is because a locked pair of legs will be slightly less
> > extended than a pair that's just about to lock or unlock, which means the weight
> > will transfer over to the walking legs just before they stop walking and again
> > just after they start walking.
> >
> > Exactly when do the stationary legs switch over to walking legs? Do the
> > previous walking legs have to fully settle into "stationary" position, or is
> > there a slight transition phase where the one set is just about to complete its
> > walking cycle as the next set begins its own?
>
> Transitions happen when the switches of the pistons that are changing let
> pressure from the center port to one of the two output ports.
>
> In this particular scenario, the walking legs extend to the floor, causing a
> timing piston/switch to change state. The timing piston does not represent a
> muscle in the body like the pistons in the legs and hips. It is merely needed
> to provide the correct sequence of the overall circuit. When the timing piston
> finishes transitioning, then the legs that were stationary become the walking
> legs.
>
> Yes, the walking legs have to become stationary before the timing piston changes
> state. The delay of the timing piston also helps assure that the walking legs
> have had time to settle into stationary positions.
>
> Before quad242 could actually walk, I had problems with races between the
> walking legs becoming stationary and the stationary legs becoming walking. I
> tried all kinds of boolean logic tricks to kill the races, but they didn't work.
> In the end, I added the timing pistons (one per leg group) to act as race
> killers.
I don't know if this timing diagram helps explain the verbiage above. Forward
slashes represent the pistons expanding, and the backward slashes represent the
pistons contracting. Horizontal lines represent unchanging pistons. When all
four walking legs contract, they become stationary. At this point, all eight
legs are weight bearing. This makes the timing piston contract. When the
timing piston contracts the stationary legs become walking legs.
_
\____ Walking leg becomes stationary
_
\____ Walking leg becomes stationary
_
\____ Walking leg becomes stationary
_
\____ Walking leg becomes stationary
__
\__/ Timing piston
__
___/ Stationary leg becomes walking
__
___/ Stationary leg becomes walking
__
___/ Stationary leg becomes walking
__
___/ Stationary leg becomes walking
A
+ All legs down
012345
> Traditional pneumatic circuit designs have a central timing circuit which
> controls the muscle pistons. The muscle pistons are uninstrumented and it is
> assumed that they will expand/contract at similar enough rates to make things
> work. This can lead to assymetries in the actuations of the muscle pistons,
> because no two pistons expand/contract at the same rate.
>
> My pneumatic designs use the muscle pistons as the timing pistons whenever
> possible. This means that if four pistons are to change at the same time (as in
> the case of putting the walking legs down), the transition is not complete until
> leg1 and leg2 and leg3 and leg4 have completed the transition. Only then is
> pressure applied to the next piston(s) in the sequence. The whole thing depends
> on when the switches say the pistons are expanded/contracted vs. when the
> pistons are actually expanded or contracted.
>
> In this case, the accuracy of "actual lock" vs. "lock acquired" as indicated by
> the switches is the issue. I'm certain there is a margin of error there, but
> hopefully it will be negligable.
>
> Kevin
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> _
> \____ Walking leg becomes stationary
> _
> \____ Walking leg becomes stationary
> _
> \____ Walking leg becomes stationary
> _
> \____ Walking leg becomes stationary
> __
> \__/ Timing piston
> __
> ___/ Stationary leg becomes walking
> __
> ___/ Stationary leg becomes walking
> __
> ___/ Stationary leg becomes walking
> __
> ___/ Stationary leg becomes walking
> A
> + All legs down
>
> 012345
Makes sense to me.
Makes sense to me.
Makes sense to me.
Makes sense to me.
:)
The prototype leg looks very good. However, I do have one question. Given the
angle of the leg, there will be pressure on the sidestep piston to pull the
piston apart. (overextend) Is that something to worry about?
So, most of the time, the piston will be extended (except when stepping
sideways). Would it be better to mount the piston above the pivot, so it's
normal state is contracted?
Also, it's hard to tell from the angle of the picture, but I assume the leglock
is supported by more than the switch, right? I don't think it would be good to
put the weight of the SSClagorpion into the switch. :)
Next, we just need to attach a sensor, to detect when the leg is locked (one for
each front leg) and another to detect when the foot is actually on the floor,
and we'll be set...
Cool.
Steve
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > _
> > \____ Walking leg becomes stationary
> > _
> > \____ Walking leg becomes stationary
> > _
> > \____ Walking leg becomes stationary
> > _
> > \____ Walking leg becomes stationary
> > __
> > \__/ Timing piston
> > __
> > ___/ Stationary leg becomes walking
> > __
> > ___/ Stationary leg becomes walking
> > __
> > ___/ Stationary leg becomes walking
> > __
> > ___/ Stationary leg becomes walking
> > A
> > + All legs down
> >
> > 012345
>
>
> Makes sense to me.
> Makes sense to me.
> Makes sense to me.
> Makes sense to me.
>
> :)
Welcome to the "Department of Redundancy Department". LOL!
>
>
> The prototype leg looks very good. However, I do have one question. Given the
> angle of the leg, there will be pressure on the sidestep piston to pull the
> piston apart. (overextend) Is that something to worry about?
I don't think so as long as the piston head is not flexed too much side to side.
Too much misaligment can cause seal leakage.
Also I can try to add a mechanical stop that aleviates the full weight bearing
pull on the piston.
>
> So, most of the time, the piston will be extended (except when stepping
> sideways). Would it be better to mount the piston above the pivot, so it's
> normal state is contracted?
On one of my previous leg designs, I had the piston on the top. I intentionaly
put the piston below the leg for sylistic reasons. I think that the piston is
more "hidden" below the leg, than it is when it is on the top. I also think
this looks more natural.
>
> Also, it's hard to tell from the angle of the picture, but I assume the leglock
> is supported by more than the switch, right? I don't think it would be good to
> put the weight of the SSClagorpion into the switch. :)
Absolutely, two light grey liftarms (1x7 thick) connect the vertical hip
structure to the piston and the dark grey liftarm (1x5 thick) which attaches to
the leg structure.
>
> Next, we just need to attach a sensor, to detect when the leg is locked (one for
> each front leg) and another to detect when the foot is actually on the floor,
> and we'll be set...
I was assuming that I'd use competition arrows for feet, but I'll have to
reconsider this for the front two feet. Maybe the arrows will have to push the
touch sensors on the feet.
>
>
> Cool.
Thanks. The leg lock mechanism was a very good idea Steve, thanks. I was really
struggling with the brute force nature of three pistons leveraging on the leg.
I know my designs are not stylistic like Erics, but I do prefer a simplicity
(and therefore beauty IMHO) in my structures that I was not able to acheive with
the three vertical pistons.
I think it was Doug Carlson that said my designs were advanced, yet simple. I
like that. People often comment on how few parts I use.
I think the new leg design looks much more organic than previous designs.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > The prototype leg looks very good. However, I do have one question. Given the
> > angle of the leg, there will be pressure on the sidestep piston to pull the
> > piston apart. (overextend) Is that something to worry about?
>
> I don't think so as long as the piston head is not flexed too much side to side.
> Too much misaligment can cause seal leakage.
>
> Also I can try to add a mechanical stop that aleviates the full weight bearing
> pull on the piston.
I suspect once you get the switches added, there will be more support. But it
seems like a stop at one or both ends would not be a bad idea.
> >
> > So, most of the time, the piston will be extended (except when stepping
> > sideways). Would it be better to mount the piston above the pivot, so it's
> > normal state is contracted?
>
> On one of my previous leg designs, I had the piston on the top. I intentionaly
> put the piston below the leg for sylistic reasons. I think that the piston is
> more "hidden" below the leg, than it is when it is on the top. I also think
> this looks more natural.
Yes, that leg looks very good.
> >
> > Next, we just need to attach a sensor, to detect when the leg is locked (one for
> > each front leg) and another to detect when the foot is actually on the floor,
> > and we'll be set...
>
> I was assuming that I'd use competition arrows for feet, but I'll have to
> reconsider this for the front two feet. Maybe the arrows will have to push the
> touch sensors on the feet.
The touch sensors don't have to be in the feet. They could be higher up in the
leg, or even in the hip. So, if you manually lift the leg, it would trigger the
touch sensor. In fact, that may help it sense when it's stepping on something
higher (uneven ground). Forget that. You can still put the sensor almost
anywhere.
>
> Thanks. The leg lock mechanism was a very good idea Steve, thanks. I was really
> struggling with the brute force nature of three pistons leveraging on the leg.
Yes, me too. The leverage issue was limiting how long and angled the legs could
be. Now we don't have to worry about that.
Eric will still need to be sure a single piston without too much leverage can
lift a fully decorated leg.
> I know my designs are not stylistic like Erics, but I do prefer a simplicity
> (and therefore beauty IMHO) in my structures that I was not able to acheive with
> the three vertical pistons.
>
> I think it was Doug Carlson that said my designs were advanced, yet simple. I
> like that. People often comment on how few parts I use.
It's usually harder to create a simple design to function as well as the more
complex designs. People often think it was easier to make, because it looks
simple. I also like doing that.
>
> I think the new leg design looks much more organic than previous designs.
Yes, it looks nice. But I'm sure Eric will add a bunch of crap, and make it
look even better... :)
Steve
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
Hey guys. Just checking in to give my Friday Hugs and Kisses.
Let's return to basics and give a breakdown of current studies and efforts.
Where do we stand with our beloved, yet silly named project?
I personnaly know, but let's lay it out for the masses.
1. Kevin Clague and Steve Hassenplug have both been working on walking logic and
leg attributes.
2. Kevin has completed a couple of Preliminary Leg designs.
3. Some outstanding issues yet to be tackled are as follows:
a. Determination of the leg preformance as it relates to weight and load
bearing.
b. Solution that includes a weight bearing mid point stop within the leg design
to channel the robot's body load directly throught the leg structure.
This allows the pistons that actuate the legs to be semi free of the overall
weight that is channeled down through the body.
c. What kind of goofy stuff I can decorate it with.
d. Creation of the central body truss, once a satisfactory leg design is
realized. Strides are being made by Kevin and Steve in this area.
e. Determination of the walking logic, controls and mechanisms that will factor
in the wieght of the walking truss itself. Then we can see what kind of weight
the main body can hold. Then a foray into the Arms and Tail can begin.
f. The order may not matter, it was fun to write anyway.
I feel smart,or is it the coffe? Or the company I keep?
Cheers gentleman.
e
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > > In lugnet.technic, Steve Hassenplug wrote:
>
> Hey guys. Just checking in to give my Friday Hugs and Kisses.
>
> Let's return to basics and give a breakdown of current studies and efforts.
>
> Where do we stand with our beloved, yet silly named project?
>
> I personnaly know, but let's lay it out for the masses.
>
> 1. Kevin Clague and Steve Hassenplug have both been working on walking logic and
> leg attributes.
>
> 2. Kevin has completed a couple of Preliminary Leg designs.
I started to add the trusses needed to add hip sweep (I'm told Eric likes that
phrase), and connecting legs together, but they are *very* far apart. Can;t even
do cross bracing with 1x15 liftarms.
I'm working on another prototype that has the horizontal rotation points closer
together.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
> > > > In lugnet.technic, Steve Hassenplug wrote:
Kevin, I just finished looking at the Leg designs you have made.
They are elegant as they are deceptively simplistic in their appearence.
Great Job.
You raise a good point.
When the hip sweeps, (heh heh) each leg left and right, you'll need ample
clearence to avoid collission with the other legs in the sideways motion.
This leads to a scale issue. Indeed, the room between each leg ends up making
the body quite sizable.
Food for thought:
Instead of making the body straight or rectangular, perhaps, begin arranging the
frame truss to be oval or slightly rounded to accomodate the hip sweep (heh
heh).
This way the each leg placement will sit around the oval body to allow a small
semi circle of movement for each leg. Thereby avoiding inter-leg collission.
Thoughts? ----> Oval or eliptical shaped Leg/body frame-truss.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > > In lugnet.technic, Steve Hassenplug wrote:
> > > > In lugnet.technic, Kevin L. Clague wrote:
> > > > > In lugnet.technic, Steve Hassenplug wrote:
>
> Kevin, I just finished looking at the Leg designs you have made.
>
> They are elegant as they are deceptively simplistic in their appearence.
> Great Job.
Thanks, Eric.
>
> You raise a good point.
>
> When the hip sweeps, (heh heh) each leg left and right, you'll need ample
> clearence to avoid collission with the other legs in the sideways motion.
>
> This leads to a scale issue. Indeed, the room between each leg ends up making
> the body quite sizable.
>
> Food for thought:
>
> Instead of making the body straight or rectangular, perhaps, begin arranging the
> frame truss to be oval or slightly rounded to accomodate the hip sweep (heh
> heh).
I think this will make forward/backward walking do a side to side stagger, as
Steve realized sideways walking was going to work.
>
> This way the each leg placement will sit around the oval body to allow a small
> semi circle of movement for each leg. Thereby avoiding inter-leg collission.
If we measure the total distance front to back that the foot travels, this tells
us the minimum spacing between the hips. We'll have to add a bit of extra
distance to add a margin for error.
Reducing the front to back travel reduces the minimum distance between the hips
(but also reduces the distance traveled per step).
We can reduce the stride length one of two ways:
1. Increase the length of the lever arm from the piston attachment to the
folcrum (hip rotation point).
2. Decrease the length of the leg from the the folcrum to the feet.
Both of these changes can be used and both increase the torque the leg can
create.
Last night I did a little study. With the yellow leg, the total stride length
is 24 studs. Adding four more studs for safety margin, we get a total of 28
studs. Given four hips, we need three spaces between the hips, for a total of
84 studs from front hip to back hip, or about 7 1x15 liftwarms.
Pretty good sized.
If we reduce the stride length, this gets smaller. Adding another piston to hip
sweep to provide *pure* sideways walking would make the stride length longer, so
we'd have to double the distance between the folcrum and the piston attachment
point to keep the stride length the same.
>
> Thoughts? ----> Oval or eliptical shaped Leg/body frame-truss.
For now I'd like to stick to rectangular, but I could see that making it
oval/eliptical could be more attractive to the eye.
>
> e
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
>
> Kevin, I just finished looking at the Leg designs you have made.
>
> They are elegant as they are deceptively simplistic in their appearence.
> Great Job.
>
> You raise a good point.
>
> When the hip sweeps, (heh heh) each leg left and right, you'll need ample
> clearence to avoid collission with the other legs in the sideways motion.
>
> This leads to a scale issue. Indeed, the room between each leg ends up making
> the body quite sizable.
I started putting together the trusses needed to articulate the hip and hook two
hips together, and found that this leg design:
http://www.kclague.net/SSCorpion/P5020134.JPG
needed to be compacted. I imagine the body truss made of long side rails, that
the hips connected to. When I started to put the side rails on the above hip,
the rails were too far apart to do decent cross bracing.
I redesigned the hip structure and came up with this hip (front view)
http://www.kclague.net/SSCorpion/hip_05082004.JPG
and this view from the back:
http://www.kclague.net/SSCorpion/hip_2_05082004.JPG
I built two of the legs and hooked them together like this:
http://www.kclague.net/SSCorpion/P5050150.JPG
Giving this view from the outside:
http://www.kclague.net/SSCorpion/P5050144.JPG
The two legs are in different leg groups, so we can go through the walking
sequence for both groups giving us this picture:
http://www.kclague.net/SSCorpion/seq_05082004.JPG
Because of the camera angle and shadows due to flash, it is hard to tell when
legs are raised. The leg lift is more clear in this picture:
http://www.kclague.net/SSCorpion/P5050152.JPG
Off to build two more legs to see what we end up with for total length of one
side from hip to hip. I fear the scale is too large and that the legs will not
be structurally sound. Only time will tell.
Feedback?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> Where do we stand with our beloved, yet silly named project?
Hey, who says out project name is silly?!?!? That sounds like something
Courtney would say!
Anyway.....
I've got 8 legs built, and six framed together to get an idea of dimensions.
I've been trying to work on trusses stuff, but I'm running out of parts! I even
*had* to use studded parts, because I ran out of 1x11 thick liftarms.
Using studded parts in the trusses probably will be neccessary to get the
strength needed. So far there is a *lot* of deformation due to the weight.
I've been trying to work with 3/4/5 triangles (or multiples thereof) to form the
body with cross bracing. Hey TJ, you are the structural engineer. You got
recommendations on how to do lightweight but strong truss structures for our
scorpion?
I've got six of the legs combined together into a hexapod then ran out of parts.
The pistons are unpressured, so the leg lock mechanism seems to be working well.
http://www.kclague.net/SSCorpion/P5060153.JPG
http://www.kclague.net/SSCorpion/P5060154.JPG
http://www.kclague.net/SSCorpion/P5060155.JPG
It currently requires all six legs be down to hold itself up. Need *lots* and
*lots* of cross bracing, before it will be able to be weight bearing with just
one leg group.
The current deformation also makes the feet touch on adjacent feet. May have to
rework the hip spacing to compensate for that.
Anyone got a lot of 1x11 tick liftarms?
Feedback?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
Steve,
You seem to be keeping track of the inventory..... What all did you plan to
have packed into the torso of SSClagorpion?
I'd like to scale the size of the torso back by shortening the legs a bit.
I'm feeling the scale is too large.
If I have an inventory of what all will be in the torso, I can know the lower
bound of the torso volume and dimensions.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> Steve,
> You seem to be keeping track of the inventory..... What all did you plan to
> have packed into the torso of SSClagorpion?
>
> I'd like to scale the size of the torso back by shortening the legs a bit.
> I'm feeling the scale is too large.
>
> If I have an inventory of what all will be in the torso, I can know the lower
> bound of the torso volume and dimensions.
The body will need to hold 2 RCXs, 1 Spybot, and 1 compressor. The Spybot would
be the head, and the RCXs should face the Spybot (for IR). I'm pretty sure
facing the back of the Spybot is fine.
The compressor size is up to you.
Why not use studded beams for the body? Looking at the pictures, I think the
body needs to be much wider. Almost square, with six legs.
Oh, and we still need sensors in the leg. Can you make building plans for a
leg? (At least the part that does the work)
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Steve,
> > You seem to be keeping track of the inventory..... What all did you plan to
> > have packed into the torso of SSClagorpion?
> >
> > I'd like to scale the size of the torso back by shortening the legs a bit.
> > I'm feeling the scale is too large.
> >
> > If I have an inventory of what all will be in the torso, I can know the lower
> > bound of the torso volume and dimensions.
>
> The body will need to hold 2 RCXs, 1 Spybot, and 1 compressor. The Spybot would
> be the head, and the RCXs should face the Spybot (for IR). I'm pretty sure
> facing the back of the Spybot is fine.
>
> The compressor size is up to you.
>
> Why not use studded beams for the body? Looking at the pictures, I think the
> body needs to be much wider. Almost square, with six legs.
Wider? I was thinking the opposite.
>
> Oh, and we still need sensors in the leg. Can you make building plans for a
> leg? (At least the part that does the work)
Do you mean an LDrawfile?
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Steve,
> > You seem to be keeping track of the inventory..... What all did you plan to
> > have packed into the torso of SSClagorpion?
> >
> > I'd like to scale the size of the torso back by shortening the legs a bit.
> > I'm feeling the scale is too large.
> >
> > If I have an inventory of what all will be in the torso, I can know the lower
> > bound of the torso volume and dimensions.
>
> The body will need to hold 2 RCXs, 1 Spybot, and 1 compressor. The Spybot would
> be the head, and the RCXs should face the Spybot (for IR). I'm pretty sure
> facing the back of the Spybot is fine.
>
> The compressor size is up to you.
>
> Why not use studded beams for the body? Looking at the pictures, I think the
> body needs to be much wider. Almost square, with six legs.
It was a joke Steve...... Gotta get those studless beam haters some stimuli.
Studded beams make a lot of sense in the body, because of their superior
strenght.
>
> Oh, and we still need sensors in the leg. Can you make building plans for a
> leg? (At least the part that does the work)
Patience Steve. I spent *all* day yesterday and this morning getting this much
done. The design of the leg part that touches the ground is very much
*undesigned* yet. Sensors are not nearly as critical to me as getting the legs
and body trusses so that they can be weight bearing.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > Why not use studded beams for the body? Looking at the pictures, I think the
> > body needs to be much wider. Almost square, with six legs.
>
> It was a joke Steve...... Gotta get those studless beam haters some stimuli.
>
> Studded beams make a lot of sense in the body, because of their superior
> strenght.
I wasn't sure if you were on some studless-beam kick... :)
I think the body needs to be wider, for scale.
>
> >
> > Oh, and we still need sensors in the leg. Can you make building plans for a
> > leg? (At least the part that does the work)
>
> Patience Steve. I spent *all* day yesterday and this morning getting this much
> done.
I know this takes time.
> The design of the leg part that touches the ground is very much
> *undesigned* yet. Sensors are not nearly as critical to me as getting the legs
> and body trusses so that they can be weight bearing.
I was thinking about the leg lock & pistion that you set-up.
--
I came up with an arm design. I haven't made a claw, yet, but it's a start. It
will detect contact (bumping into something) by directing movement to a single
rotation sensor mounted in the body.
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm01.jpg
The red beams on the right are "studless" body parts. Also, there is a liftarm
with a rubberband, which springs the whole assembly back into place. Here are
some more shots:
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm02.jpg
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm03.jpg
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm04.jpg
It's made up of the claw (not pictured) the body (not pictured) and three
sections like this:
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarmsection.jpg
Make sense?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > Why not use studded beams for the body? Looking at the pictures, I think the
> > > body needs to be much wider. Almost square, with six legs.
> >
> > It was a joke Steve...... Gotta get those studless beam haters some stimuli.
> >
> > Studded beams make a lot of sense in the body, because of their superior
> > strenght.
>
> I wasn't sure if you were on some studless-beam kick... :)
I tend to build with studless parts unless studs are needed, but in this case we
don't need the studs, but will need the strength (and parts with the right
number of holes).
>
> I think the body needs to be wider, for scale.
Is there an echo in here?
> > > Oh, and we still need sensors in the leg. Can you make building plans for a
> > > leg? (At least the part that does the work)
> >
> > Patience Steve. I spent *all* day yesterday and this morning getting this much
> > done.
>
> I know this takes time.
>
>
> > The design of the leg part that touches the ground is very much
> > *undesigned* yet. Sensors are not nearly as critical to me as getting the legs
> > and body trusses so that they can be weight bearing.
>
>
> I was thinking about the leg lock & pistion that you set-up.
>
> --
> I came up with an arm design. I haven't made a claw, yet, but it's a start. It
> will detect contact (bumping into something) by directing movement to a single
> rotation sensor mounted in the body.
>
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm01.jpg
>
> The red beams on the right are "studless" body parts. Also, there is a liftarm
> with a rubberband, which springs the whole assembly back into place. Here are
> some more shots:
>
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm02.jpg
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm03.jpg
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm04.jpg
>
> It's made up of the claw (not pictured) the body (not pictured) and three
> sections like this:
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarmsection.jpg
>
> Make sense?
Yes, it will be interesting to see how the two scales match up.
I'd like to make the whole thing smaller..... except for the width of the body.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
OK, here is an interesting problem I'd not thought about. When the legs are
like this (only down legs shown)
A\_ B
_/D
C
E\_
F
_/H
G
The body tips over toward leg G. I'm sure this would happen to all four
corners. I know that I need to strengthen the end of the legs, because the
1x15's are bending a lot.
I also probably need to shorten the legs, and decrease the swing.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> I think the body needs to be wider, for scale.
http://www.enchantedlearning.com/subjects/arachnids/scorpion/Scorpionprintout.shtml
The above picture shows a body that is longer than it is wide.
I'm going to rearchitect the legs so that they get longer and more swept back as
you move toward the back legs. This should end the issue falling over.
I'm also going to try to create a non-rectangular body that better matches the
shape in the diagram.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> --
> I came up with an arm design. I haven't made a claw, yet, but it's a start. It
> will detect contact (bumping into something) by directing movement to a single
> rotation sensor mounted in the body.
>
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/sscarm01.jpg
> Make sense?
>
> Steve
oh hey wow, I see how the motion is transfered back towards the rear of the
structure. Neat. Hey, but we are gonna aim to make a robotic claw aren't we, in
addition to the sensor funtionality you mentioned. Right? This is where Kevin
and I wanted this to go during our pre-Lugnet discussions.
BTW, once a fair estimate of the body structure size can be made, would you like
to build either the Tail or Arms? One of us could make either a Tail and or a
set of Arms and thereby share the design build.
Would you like to make a set of Arms?
or
Would you like to make a Tail?
This gives each of us a region and area of responsibility, in addition to
helping Kevin share the burden.
Hey Kevin!
When you are able, it looks like you need some parts! Send me a list!
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > I came up with an arm design. I haven't made a claw, yet, but it's a start.
>
> oh hey wow, I see how the motion is transfered back towards the rear of the
> structure. Neat. Hey, but we are gonna aim to make a robotic claw aren't we, in
> addition to the sensor funtionality you mentioned. Right?
Eric,
How much of the above message did you read? :) Never mind, don't answer that.
:)
Yes, I'm planning on making a pneumatic claw. Looking at the diagram Kevin
posted, I expect to re-build the arm. I'm just playing around with ideas.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > >
> > > I came up with an arm design. I haven't made a claw, yet, but it's a start.
> >
> > oh hey wow, I see how the motion is transfered back towards the rear of the
> > structure. Neat. Hey, but we are gonna aim to make a robotic claw aren't we, in
> > addition to the sensor funtionality you mentioned. Right?
>
> Eric,
>
> How much of the above message did you read? :) Never mind, don't answer that.
> :)
I know, I know, I was just asking to ask. Also, in a round about way I was both
aknowledging your Arm(s) build and at once relegating my duty to the tail build.
>
> Yes, I'm planning on making a pneumatic claw. Looking at the diagram Kevin
> posted, I expect to re-build the arm. I'm just playing around with ideas.
>
> Stev
sweet.
e
| | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
>
>
> > Where do we stand with our beloved, yet silly named project?
>
> Hey, who says out project name is silly?!?!? That sounds like something
> Courtney would say!
Grrr... I resemble that remark!
Use my name in vain if you like [1], I just ask you give me a three-hour tour of
the project when it's complete <gdr> ;-)
-Tim
[1] Dave! knows what I'm talking about.
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Tim Courtney wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > > In lugnet.technic, Steve Hassenplug wrote:
> >
> >
> > > Where do we stand with our beloved, yet silly named project?
> >
> > Hey, who says out project name is silly?!?!? That sounds like something
> > Courtney would say!
>
> Grrr... I resemble that remark!
Ha ha.
>
> Use my name in vain if you like [1], I just ask you give me a three-hour tour of
> the project when it's complete <gdr> ;-)
If we can get this project done you and RTL have to buy the three of us beers at
BF.
> -Tim
>
> [1] Dave! knows what I'm talking about.
He can buy us beers too.
Pop, or soda, depending on where he's from.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Tim Courtney wrote:
>
> Use my name in vain if you like [1], I just ask you give me a three-hour tour of
> the project when it's complete <gdr> ;-)
>
> -Tim
If I ever get my hands on the little guy, I'll make sure and bring it to a CLB
(Chicago LEGO Builders) meeting. :)
Steve
ps If the guys from rtl want to see it, they're welcome to come to the meeting,
also... :)
| | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
>
>
> > Where do we stand with our beloved, yet silly named project?
>
> Hey, who says out project name is silly?!?!? That sounds like something
> Courtney would say!
Ha Ha! I got Tim in trouble, lol!
> Anyway.....
>
> I've got 8 legs built, and six framed together to get an idea of dimensions.
Oh there's my baby now! Growing.
ok, one thing. The body. I gotta teach ya.
The quick fit to test the feel is cool.
However the real deal, well, we'll guild that lilly.
The central area of the body can or will feature the Compressor suites and other
controls. The bedding of these components will serve to bind the other leg truss
elements towards the central frame.
The cross bracing and binding of the central body components to the exisiting
leg structures will layer themselves together, forming the needed structural
extensions needed for the required rigidity. Once they are bonded slowly and
carefully.
What would Dave Chappel do?
e
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > > In lugnet.technic, Steve Hassenplug wrote:
> >
> >
> > > Where do we stand with our beloved, yet silly named project?
> >
> > Hey, who says out project name is silly?!?!? That sounds like something
> > Courtney would say!
>
> Ha Ha! I got Tim in trouble, lol!
Isn't saying is name *always* in vain? LOL!
>
> > Anyway.....
> >
> > I've got 8 legs built, and six framed together to get an idea of dimensions.
>
> Oh there's my baby now! Growing.
> ok, one thing. The body. I gotta teach ya.
> The quick fit to test the feel is cool.
> However the real deal, well, we'll guild that lilly.
>
> The central area of the body can or will feature the Compressor suites and other
> controls. The bedding of these components will serve to bind the other leg truss
> elements towards the central frame.
Right. I agree totally. As I said in a previous post, I'm starting over. What
I learned is that the locking leg works, and that I need to reconsider what it
takes to make it stay upright based on the body shape, the leg shape, length
*and* it's inherit strength. The legs will be much more vertical that the ones
so far, decreasing the leverage when weight bearing, and easing the forces on
the lock mechanism.
I'm going to start with the compressor. Steve, I'm going to make the compressor
using RC Racer motors. They provide the best power for compressing the air.
This means that we'll need a battery box or two. If we want the RCX to control
the motors, then we'll need a motor and electrical polarity reversor(s).
I'm going to try making a compressor out of two pistons and four check valves
from the old LEGO pneuatic single port piston setup. This will give us two
pumping actions per piston per complete rotation. The pumping actions are 180
degrees out of phase. Using two pistons, offset by 90 degrees, we get four
compressions per rotation. This will make it more compact.
>
> The cross bracing and binding of the central body components to the exisiting
> leg structures will layer themselves together, forming the needed structural
> extensions needed for the required rigidity. Once they are bonded slowly and
> carefully.
I agree. It needs to be integrated from the inside out.
When studying pictures of scorpions, I realized that the hips are packed
together with nothing in between, and that the legs spread out giving it
stability. I'm going to work towards that kind of design. The front legs are
shorter, and the back legs are longer. The packed hips make up about half the
torso, and the back legs get long and lead backwards before you get to the foot.
I want to try to mimic this in SSClagorpion. On the longer legs, the
articulations will not be at the hips, but further down the leg closer to the
foot. Then front legs might have the articulation at the hip.
This means I get to build truss structures coming out of the body, and then have
articulation. I like it. Never done it before. For me, building out of LEGO
is about learning. I like to stretch myself on each new project. In the recent
past, I'm mostly stretched myself on pneumatic circuit design. This times it is
going to be about my least favorite class in college: "stresses and strains".
I will consider sideways walking as still in and forget about part count right
now.
So, pack together a spybot, two RCX's, a compressor, pneumatic multiplexors and
their controlling motors, and battery box(es) and polarity reversors and their
motor into the torso. OK......
I also need to make the batteries easily replacable.
I vote I build a high pressure cutoff switch into the compressor. I can provide
an electrical polarity reversor for manual (i.e. human) off/on. This means the
compressors are not controlled by the RCX. One less thing for them to worry
about.
On the topic of the pneumatic "stop/go" switch.....
If we have a pneumatic on/off switch between the compressors and the rest of the
pneumatic circuit, then when we flip off the pressure, we have no idea which of
the walking states we're in, or possibly we're transitioning from one state to
the next. If we leave the beast on for 10 minutes, the pressure in the legs
will drop due to leakage. The compressor cannot help with this leakage, because
it is isolated from the rest of the circuitry. We run the risk of falling down.
I propose that our on/off switch(es?) be placed in circuit in a way that stops
the pneumatic state machine from transition to the next state. This way when
the pressure drops due to leakage, the compressor will kick in and bring the
pressure back up. With this, we introduce the ability to add a hold to any
state.
The question is, which of the states do we want to be able to hold? There are
two points in the walking sequence where all 8 feet are down. I vote we be able
to stop in both of these states. We have the stop/go motor control four
switches that can stop pressure at two points in the circuit.
When we shut everything off, the beast's legs will be locked into place
mechanically, so it should be stable even with all power off, and startup is
simple. This means that SSClagorpion will be able to sleep standing up.
If there are other "hold" points needed in the circuit, we can add those also.
In theory we could hold in every state, but I'm not sure we need it.
Given the above, I guess I have *a lot* to build. :^)
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> I learned is that the locking leg works, and that I need to reconsider what it
> takes to make it stay upright based on the body shape, the leg shape, length
> *and* it's inherit strength. The legs will be much more vertical that the ones
> so far, decreasing the leverage when weight bearing, and easing the forces on
> the lock mechanism.
I don't think we need to worry TOO much about easing forces on the lock. My
testing shows it works quite well. But there are many stresses on other parts
as the legs get longer, and more angled, so moving them in is not a bad idea.
>
> I'm going to start with the compressor. Steve, I'm going to make the compressor
> using RC Racer motors. They provide the best power for compressing the air.
> This means that we'll need a battery box or two. If we want the RCX to control
> the motors, then we'll need a motor and electrical polarity reversor(s).
I don't think the RCX needs to do anything with the compressor. That should be
all automatic.
However, I must tell you (from experience) that two RC Racer motors running
under load will cause the thermal resistor in a single battery box to heat up
and shut off the power in less than a minute.
So, I recommend using 1 battery box per RC motor.
>
> I will consider sideways walking as still in and forget about part count right
> now.
Do real scorpions actually walk sideways? (my wife ask me this question)
> So, pack together a spybot, two RCX's, a compressor, pneumatic multiplexors and
> their controlling motors, and battery box(es) and polarity reversors and their
> motor into the torso. OK......
>
> I also need to make the batteries easily replacable.
While it's good to make the RCX batteries easily replaceable, they won't be
driving very much, so replacement shouldn't be a big problem. However, the
battery box(es) will need to be replaced.
> On the topic of the pneumatic "stop/go" switch.....
>
> If we have a pneumatic on/off switch between the compressors and the rest of the
> pneumatic circuit, then when we flip off the pressure, we have no idea which of
> the walking states we're in, or possibly we're transitioning from one state to
> the next. If we leave the beast on for 10 minutes, the pressure in the legs
> will drop due to leakage. The compressor cannot help with this leakage, because
> it is isolated from the rest of the circuitry. We run the risk of falling down.
>
> I propose that our on/off switch(es?) be placed in circuit in a way that stops
> the pneumatic state machine from transition to the next state. This way when
> the pressure drops due to leakage, the compressor will kick in and bring the
> pressure back up. With this, we introduce the ability to add a hold to any
> state.
With the leg lock, I don't think loosing pressure will cause a problem.
However, as you said, it could easily be in an undefined state when turned off.
Personally, I really like the idea of just controlling the state machine. Your
drawing seems to show six states. You said there are two pistons, so that
sounds like there are four possible states. (not counting transitions) No, I
count six. Anyway...
If we put sensors on the switches, can we detect which state it's in? I still
like controlling the state machine, but this would give more info to the RCX,
and possibily eliminate the need to have a "hip" sensor.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
<snip>
> I don't think the RCX needs to do anything with the compressor. That should be
> all automatic.
>
> However, I must tell you (from experience) that two RC Racer motors running
> under load will cause the thermal resistor in a single battery box to heat up
> and shut off the power in less than a minute.
>
> So, I recommend using 1 battery box per RC motor.
I was assuming this.
> > I will consider sideways walking as still in and forget about part count right
> > now.
>
>
>
> Do real scorpions actually walk sideways? (my wife ask me this question)
I've had difficulties finding videos of scoprions ambulating. I keep getting
hits on "Scorpion King". Ack
> > On the topic of the pneumatic "stop/go" switch.....
> >
> > If we have a pneumatic on/off switch between the compressors and the rest of the
> > pneumatic circuit, then when we flip off the pressure, we have no idea which of
> > the walking states we're in, or possibly we're transitioning from one state to
> > the next. If we leave the beast on for 10 minutes, the pressure in the legs
> > will drop due to leakage. The compressor cannot help with this leakage, because
> > it is isolated from the rest of the circuitry. We run the risk of falling down.
> >
> > I propose that our on/off switch(es?) be placed in circuit in a way that stops
> > the pneumatic state machine from transition to the next state. This way when
> > the pressure drops due to leakage, the compressor will kick in and bring the
> > pressure back up. With this, we introduce the ability to add a hold to any
> > state.
>
>
> With the leg lock, I don't think loosing pressure will cause a problem.
> However, as you said, it could easily be in an undefined state when turned off.
I agree.
>
> Personally, I really like the idea of just controlling the state machine. Your
> drawing seems to show six states. You said there are two pistons, so that
> sounds like there are four possible states. (not counting transitions) No, I
> count six. Anyway...
As far as the legs go, there are six states. But there are two timing pistons
that each have to transition making a total of 10 states.
> If we put sensors on the switches, can we detect which state it's in? I still
> like controlling the state machine, but this would give more info to the RCX,
> and possibily eliminate the need to have a "hip" sensor.
Yes. Electrically monitoring the pneumatic switches will tell you exactly what
state you are in.... except that pistons have three states..... Expanded,
contracted, or transitioning.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
-snip-
wow, great post kevin.
e
| | | | | | | | | | | | | | | | | | | | | | |
Steve,
What are all the responsibilities of the spybot, and the two RCXs.
One of the RCX's must control the two motors that cause forward/backward mux
and turning mux. Another motor for sideways.
Do you also need a motor to control the pneumatic claw?
What else?
Do the RCX's talk to each other using infra-red?
Do the RCX's talk to the spybot using infra-red?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> Steve,
> What are all the responsibilities of the spybot, and the two RCXs.
The main responsibility of the Spybot is to process IR commands from the remote.
That will give us the ability to control SSC via remote.
The Spybot has two built-in motors. Those can control some auxiliary
(non-critical) function, like open/close the claw (one motor, each claw)
> One of the RCX's must control the two motors that cause forward/backward mux
> and turning mux. Another motor for sideways.
Yes. RCX outputs:
A) Direction (forward/backward or right/left)
B) Switch between walk and turn
C) Switch between (B) and side-step
D) Start/Stop State Machine (halt walking)
E) Curl tail?
RCX Inputs:
1) Light sensor 1 from state machine piston (reads 3 possible state)
2) Light sensor 2 from state machine
3) Touch sensor from front foot 1
4) Touch sensor from front foot 2
5) Rotation sensor from arm 1
6) Rotation sensor from arm 2
> Do you also need a motor to control the pneumatic claw?
>
> What else?
>
> Do the RCX's talk to each other using infra-red?
>
> Do the RCX's talk to the spybot using infra-red?
Yes, all three will communicate via IR.
We should be able to do it without the Spybot, but it adds some cool stuff.
Steve
| | | | | | | | | | | | | | | | | | | | | | |
ok, so we have about 200 messages in this thread. I'm going to start changing
the subject to actually include the... subject. But still keep SSClagorpion,
for those who chose to skip the thread.
Kevin was talking about a compressor based on an RC motor. Given that the
perfect compressor doesn't already exits (
http://news.lugnet.com/technic/?n=12638 ) I think I'm going to play around with
that a bit, while Kevin plays with his legs.
I really haven't messed with this stuff before, so maybe someone out there can
direct me to a good starting place.
I've seen discussions (not sure about details) about getting up to pressure, VS
maintaining pressure. Sounds like the really important part is the volume of
air moved.
I'm going to play around with some ideas, tonight, and see what I get.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> ok, so we have about 200 messages in this thread. I'm going to start changing
> the subject to actually include the... subject. But still keep SSClagorpion,
> for those who chose to skip the thread.
>
> Kevin was talking about a compressor based on an RC motor. Given that the
> perfect compressor doesn't already exits (
> http://news.lugnet.com/technic/?n=12638 ) I think I'm going to play around with
> that a bit, while Kevin plays with his legs.
>
> I really haven't messed with this stuff before, so maybe someone out there can
> direct me to a good starting place.
>
> I've seen discussions (not sure about details) about getting up to pressure, VS
> maintaining pressure. Sounds like the really important part is the volume of
> air moved.
Yes, it is, assuming you have enough pressure for the circuit to advance though
the sequence.
>
> I'm going to play around with some ideas, tonight, and see what I get.
>
> Steve
OK. As I said in an earlier post, I'm working on a "dual action" pump
compresssor. I've got two "Pneumatic Distribution Block 2 x 4 with Non-return
Valve" bricks ( http://www.bricklink.com/catalogItemPic.asp?P=4692 ). This
gives me one double acting pump. I've got three more on the way from bricklink.
I'll use two of them to get another double acting pump.
So I'll have a two piston, quad pump. Should be pretty compact. I'm in the
medium pump camp (instead of small pump). Other vocal pneuaticists think this
is folly, but I'll gleefully weather that storm.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
Using two RC racer motors, two large pistons (that's right, pistons), and three
Pneumatic Distribution Brick with Check Valve (waiting for the fourth from
Bricklink), I've made a respectable compressor.
Two Check Valve bricks ( http://www.bricklink.com/catalogItemPic.asp?P=4692 )
can be used to convert a dual port piston into two pumps. In the compressor
pictures below, you see blues hoses connected to the pistons and check valve
bricks. The check valve pressure outputs are hooked together as the compressor
output.
It works well, and makes my inchworm walk almost as fast as I can pumping by
hand.
http://www.kclague.net/SSCorpion/P5120184.JPG
http://www.kclague.net/SSCorpion/P5120185.JPG
http://www.kclague.net/SSCorpion/P5120186.JPG
http://www.kclague.net/SSCorpion/P5120187.JPG
PLMKWYT
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> OK. As I said in an earlier post, I'm working on a "dual action" pump
> compresssor. I've got two "Pneumatic Distribution Block 2 x 4 with Non-return
> Valve" bricks ( http://www.bricklink.com/catalogItemPic.asp?P=4692 ). This
> gives me one double acting pump. I've got three more on the way from bricklink.
> I'll use two of them to get another double acting pump.
Ok, so I got two of these in the mail yesterday (thanks bricklink).
But, I wasn't able to figure out too much about how they work.
Anyone know where I can find an internal diagram of what exactly, this thing
does?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
>
> Anyone know where I can find an internal diagram of what exactly, this thing
> does?
>
> Steve
Does this help?
http://isodomos.com/technica/history/1980/1984_1i.php
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Benton Jackson wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > Anyone know where I can find an internal diagram of what exactly, this thing
> > does?
> >
> > Steve
>
> Does this help?
>
> http://isodomos.com/technica/history/1980/1984_1i.php
Yes, thanks.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
I finally had some LEGO time. Given the rate that RC Racer motors suck up
current, Using two pumps with two motors and two battery packs, is about the
best I can do.
I did some measuring and calculating (only outer diameters :^(
A large piston has about 6 times the volume of a small piston. To make a a
single small pump compete, you would have to turn it over six times as fast as a
large pump. Using six pumps, you could get six small pumps compressing in the
time it takes to make one large pump compress, but if you did them
simultaneously, they would provide *more* surface area than the single large
pump. More surface area at the same pressure means more resitance.
The area of a large piston face is about four times the area of the small
piston, so six small piston are is larger than a large piston. But......
assuming you spread the small pumps evenly through a single rotation, then only
half the pumps are compressing at a time. Also only one of the pistons is
reaching maximum compression at a time (and at 1/4 of the surface aree of the
large piston).
Also, as David pointed out, the three compressing pumps have three times the
number of ports, so they have three times the bandwidth.
I'm off to make six or twelve small pump compressor and see how it compares.
Good thing I've got that many small pumps.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> Also, as David pointed out, the three compressing pumps have three times the
> number of ports, so they have three times the bandwidth.
Well that depends on how they're routed down the line. If they all pass through
a single hose at any point, bang goes your bandwidth.
ROSCO
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Ross Crawford wrote:
> Well that depends on how they're routed down the line. If they all pass
> through a single hose at any point, bang goes your bandwidth.
Not necessarily. If they're compressing in a rotating series, your output at
any given moment is much smaller than if they were going off all at the same
time, and the more positions you can get in the series, the steadier your stream
of compressed air will be. You could also borrow a trick from electricians, and
run a compressor at both ends of a single pneumatic system (maybe even run some
in the middle as well) so you can keep the pressure maximized easier without
giving it any major bottlenecks. If everything pumps in at one end, the system
doesn't work properly until the air pressure can force its way through the
entire line. If you've got air pumping in from multiple points along the line,
any cylinder that's actuating could have airflow coming in from either direction
(or both), depending on what other cylinders are being actuated at the same
time.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Are you going to make sure that all your control logic is done with small
pistons? That would seem to save a lot of air, and thus perhaps also speed the
system up quite a bit.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Benton Jackson wrote:
> Are you going to make sure that all your control logic is done with small
> pistons? That would seem to save a lot of air, and thus perhaps also speed the
> system up quite a bit.
Hi Benton,
In my experience small pistons do not control switches very well. They only
produce 1/4 the force a large piston does.
I've made one small piston walker http://www.kclague.net/pedmatic/index.htm .
It uses two pistons per switch, and the switches were chosen specifically
because they were worn enough to flip easily.
I've tried to run new 2003 pneumatic switches using small pistons, and they
didn't have the power needed.
To make something like quad242, I'd need four switches and 8 pistons per leg.
For a four legged walker, you are talking 32 small pistons. Pretty pricey given
that small pistons cost about the same as large pistons (or more even).
I bought a bunch of small pump/small pistons/short hoses packages from DACTA,
but not enough to make quad242. Maybe I just need to get more.
If I have 20 small pistons (I think I do), then I could make a 6 segment
inchworm, seperated by five sets of four pistons. That would be cool to see
inchworm go fast.
Needless to day, SSClagorpion would need *a lot* more small pistons than I
have.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Often, at work on Friday afternoon, we have informal discussions about stuff
completely unrelated to work.
This morning, I stood up and looked over my cube walls (not hard, they're only 4
ft tall) and said I had a question. I didn't get much response, until I said it
was completely unrelated to work. Then, suddenly, everyone was interested...
:)
So, we had a "Friday Afternoon" discussion of compressors, and work/time (NOT
working overtime :)
more below...
In lugnet.technic, Kevin L. Clague wrote:
> I did some measuring and calculating (only outer diameters :^(
>
> A large piston has about 6 times the volume of a small piston. To make a a
> single small pump compete, you would have to turn it over six times as fast as a
> large pump.
I did an experiment, and got the same result. The small pump had to be
compressed six times as much as the large, to provide the same pressure.
> Using six pumps, you could get six small pumps compressing in the
> time it takes to make one large pump compress, but if you did them
> simultaneously, they would provide *more* surface area than the single large
> pump. More surface area at the same pressure means more resitance.
>
> The area of a large piston face is about four times the area of the small
> piston, so six small piston are is larger than a large piston. But......
> assuming you spread the small pumps evenly through a single rotation, then only
> half the pumps are compressing at a time. Also only one of the pistons is
> reaching maximum compression at a time (and at 1/4 of the surface aree of the
> large piston).
So, my general assertion is that the "work" required to compress six small pumps
is the same as the work required to compress one large pump. That should take
into account the "pushback" pressure.
The work required to compress one small pump is 1/4 per unit of distance
(because the area of the piston head is 1/4). Also, the cylinder is
approximately 2/3s the length of the large piston.
Now, I could be wrong (it's been a while sense my last calculus class) but I
think the total work, is the area times the distance: Work=Area*Distance
So, the work required to compress a large piston once would be:
W(l) = A(l) * D(l)
And, for six small piston would be:
W(s) = 6 * A(s) * D(s)
Knowing:
A(s) = 1/4(A(l)) // area of small is 1/4 the area of the large
D(s) = 2/3(D(l)) // small distance traveled is 2/3 large distance
W(s) = 6 * (1/4(A(l)) * (2/3(D(l)) = 6/4 * 2/3 * A(l) * D(l)
W(s) = A(l) * D(l)
and
W(l) = A(l) * D(l)
so
W(l) = W(s)
anyone follow that?
I think the work required for compressing one large piston is the same as the
work required for compressing six small pistons.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
>
> So, my general assertion is that the "work" required to compress six small pumps
> is the same as the work required to compress one large pump. That should take
> into account the "pushback" pressure.
Ok, so my co-worker (with a degree in physics) said (after many calculations)
that the Work is directly related to the Volume.
Assuming 6 small pistons pump the same volume as 1 large piston, it will take
the same amount of work.
Keep in mind, with 1 piston, half the time you are doing no work, and half the
time you are doing a bunch of work. So, you should test 2 large vs 12 small.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > So, my general assertion is that the "work" required to compress six small pumps
> > is the same as the work required to compress one large pump. That should take
> > into account the "pushback" pressure.
>
>
> Ok, so my co-worker (with a degree in physics) said (after many calculations)
> that the Work is directly related to the Volume.
>
> Assuming 6 small pistons pump the same volume as 1 large piston, it will take
> the same amount of work.
>
> Keep in mind, with 1 piston, half the time you are doing no work, and half the
> time you are doing a bunch of work. So, you should test 2 large vs 12 small.
One thing not represented in your calculations is time.
Compressing one large pump takes more force than it takes to compress one small pump. With six small pumps seperated by 60 degress of phase. We can compress/expand six small pumps in the time it takes to compress one large pump. So at any given point in time, we're only ever compressing 3 of the six small pumps.
This means that we're only compressing three of the faces at a time and
therefore the peak force required in the small pump compressor is less. This
means that a given motor and its maximum torque capabilities should be able to
drive the pressure higher, because the peak torque requirement is lower.
Fun discussion!
This gives me insight into comparisons of large pump compressors vs small pump
compressors. Those of us who have been in the large pump superiority camp (I
was one of them), probably have never made a fair comparison to the appropriatly
sized small pump compressor. If you don't compare a small six against a large
one with the same motor, you are not comparing apples to apples (unless you make
sure to run the small pump six times as fast....)
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > Keep in mind, with 1 piston, half the time you are doing no work, and half the
> > time you are doing a bunch of work. So, you should test 2 large vs 12 small.
...
> This means that we're only compressing three of the faces at a time and
> therefore the peak force required in the small pump compressor is less. This
> means that a given motor and its maximum torque capabilities should be able to
> drive the pressure higher, because the peak torque requirement is lower.
That's what I was trying to say above. Sometimes, I think faster than I type,
so all the details don't make it to my fingers...
Yes, adding pistons at various angles will help even out the "work" required.
So, 2 large pistions at 180 degrees should be compared to 12 small pistons,
at... well... spread around the circle. (30 degrees?)
Or, you could compair 6 to 1 by NOT spreading the six around.
I think the best bet is to try to compare 2 large to 12 small.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > Keep in mind, with 1 piston, half the time you are doing no work, and half the
> > > time you are doing a bunch of work. So, you should test 2 large vs 12 small.
>
> ...
>
> > This means that we're only compressing three of the faces at a time and
> > therefore the peak force required in the small pump compressor is less. This
> > means that a given motor and its maximum torque capabilities should be able to
> > drive the pressure higher, because the peak torque requirement is lower.
>
>
> That's what I was trying to say above. Sometimes, I think faster than I type,
> so all the details don't make it to my fingers...
>
> Yes, adding pistons at various angles will help even out the "work" required.
> So, 2 large pistions at 180 degrees should be compared to 12 small pistons,
> at... well... spread around the circle. (30 degrees?)
>
> Or, you could compair 6 to 1 by NOT spreading the six around.
>
> I think the best bet is to try to compare 2 large to 12 small.
I knew what you were saying, but I was explaining it for those who couldn't read
between the lines......
I'm going to try a radial design. Medium pulleys have six pin holes, so I
suspect that I'll have two groups of six. I have yet to come up with a way of
ofsetting the two by 45 degrees to get things from 60 degrees to 30 degrees.
The first draft will probably have pairs of pumps at exactly the same phase
seperated by 60 degrees of rotation.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> I'm going to try a radial design. Medium pulleys have six pin holes, so I
> suspect that I'll have two groups of six. I have yet to come up with a way of
> ofsetting the two by 45 degrees to get things from 60 degrees to 30 degrees.
>
> The first draft will probably have pairs of pumps at exactly the same phase
> seperated by 60 degrees of rotation.
If you rotate the pulley 90 degrees on the axle, the holes will be in the right
place.
Another option is to mount the other end of the pistons at 30 degrees (like a
rotary engine)
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
>
> >
> > I'm going to try a radial design. Medium pulleys have six pin holes, so I
> > suspect that I'll have two groups of six. I have yet to come up with a way of
> > ofsetting the two by 45 degrees to get things from 60 degrees to 30 degrees.
> >
> > The first draft will probably have pairs of pumps at exactly the same phase
> > seperated by 60 degrees of rotation.
>
>
> If you rotate the pulley 90 degrees on the axle, the holes will be in the right
> place.
You are absolutely right of course.... You'd think I'd have a better
understanding of hexagons than that. :^)
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
I have yet to come up with a way of ofsetting the two by 45 degrees to get
things from 60 degrees to 30 degrees.
The first draft will probably have pairs of pumps at exactly the same phase
seperated by 60 degrees of rotation.
|
While a rotary design will probably be a bit more powerful, laying them all flat
could be more versatile. You could place cylinders anywhere you’ve got a little
open space, rather than having to make space for a bulky cluster of them.

Here’s a concept design I came up with (click for a larger version). I only
have one mini-pump, but this frame is designed to run one on each side. Using
this setup, each pair of pumps can be hooked up 180 degrees out of phase, or in
any 60 degree increment. Rotate one of the sheaves 90 degrees and you can get
all of the other 30 degree increments as well. Slip the gears one tooth and you
can get it down to 15 degree increments. Paired sections can be daisy-chained,
or linked together over distance using drive shafts.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, David Laswell wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
I have yet to come up with a way of ofsetting the two by 45 degrees to get
things from 60 degrees to 30 degrees.
The first draft will probably have pairs of pumps at exactly the same phase
seperated by 60 degrees of rotation.
|
While a rotary design will probably be a bit more powerful, laying them all
flat could be more versatile. You could place cylinders anywhere you’ve got
a little open space, rather than having to make space for a bulky cluster of
them.
Here’s a concept design I came up with (click for a larger version). I only
have one mini-pump, but this frame is designed to run one on each side.
Using this setup, each pair of pumps can be hooked up 180 degrees out of
phase, or in any 60 degree increment. Rotate one of the sheaves 90 degrees
and you can get all of the other 30 degree increments as well. Slip the
gears one tooth and you can get it down to 15 degree increments. Paired
sections can be daisy-chained, or linked together over distance using drive
shafts.
|
Hi David,
Thanks for the ideas. I’ll consider the planar design concept (done them
before with large pumps), but first I want to try radial. I’m curious which
design would have less moving parts? Less moving parts, less friction, higher
efficiency.
I’d prefer a design where the pump is sandwiched between two support halves,
so that it is harder for the pumps to distort the support structure. In your
design, only one endpoint of the supporting pin is fixed to the structure. This
means the pump could force the pin to twist in place, and have its shape
distorted. Using a long frictionless pin and two 24T gears would reduce the
ability of the pump to distort the pin.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
Thanks for the ideas. I’ll consider the planar design concept (done them
before with large pumps), but first I want to try radial. I’m curious which
design would have less moving parts? Less moving parts, less friction,
higher efficiency.
|
From what I’ve been told of mechanical physics, part distortion is also a
concern. There’s a tradeoff between making the pump design sturdier and keeping
the overall weight/size down. Flat component pumps can be squeezed into
available empty space rather than requiring that the frame be expanded if you
need to add more. Heck, you might even find that it works best to run rotaries
for your primary air supply and supplement them with a few sets of flat pumps as
needed.
| |
I’d prefer a design where the pump is sandwiched between two support
halves, so that it is harder for the pumps to distort the support structure.
|
It was merely a quickie build to show a design concept. I would be embarassed
for you if you used it exactly as shown because I’ve already figured out quite a
few potential improvements without really even trying. :)
| |
In your design, only one endpoint of the supporting pin is fixed to the
structure. This means the pump could force the pin to twist in place, and
have its shape distorted. Using a long frictionless pin and two 24T gears
would reduce the ability of the pump to distort the pin.
|
So frame them in on both sides. You’ve got 24 positions available just through
the gearing, so you don’t need the big sheaves for phase-adjustment. Switch
over to 1x2 flat liftarms to save weight. That still gives you four available
positions per bank, you can run a bank on each side of the main drive shaft, and
you should be able to get at least 2-3 banks stretched out over the entire
length of the main torso if you strap them to the belly (it would actually even
be anatomically appropriate for all of the “breathing” to be done there). A
fully-framed side-mounted 4-pump bank could be 1” tall x 2.5” wide x 6” long if
you frame between each individual pump, or 1” tall x 2.5” wide x 4.75” long if
you frame them in pairs on either side of the gear. If you run the drive system
above banks running opposing pumps, you can make a 4-pump bank 1” tall x 4” wide
x 3.75” long. Going that route, if your frame is at least 8” wide and 11-1/4”
long (and from what I’ve seen so far it should be at least that large), you
could fit 6 4-pump banks on the belly alone.
Anyways, it’s just an idea. If you decide to experiment with it and want any
clarification of the modified versions I’ve mentioned, LMK. For now, I’m
eagerly awaiting this rotary pump system you’re working on.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
I know how much Steve likes to wait, so......
I got enough three blade rotor parts (from Gigamesh,
http://www.peeron.com/inv/parts/44374 ) to make a hexagonal frame for my radial
compressor.
I’ve got pictures:
http://www.kclague.net/SSCorpion/P6050003.JPG
Notice the 44374’s that the pump bases are hooked to. Very aesthetically
pleasing hexagonal shape.
http://www.kclague.net/SSCorpion/P6050001.JPG
You can see the medium pulleys used to connect 6 pumps’ arms together, the
medium pulleys are twisted around the center by being offset to one of the inner
pin holes on a 40T gear.
The 40T gears are driven by 8T gears, which are driven by RC racer motors.
The next is a simple top view.
http://www.kclague.net/SSCorpion/P6050196.JPG
This picture gets you a side view. One thing to notice is that instead of
having a 12 pump compressor with two motors, we actually have two 6 pump
compressors each with its own motor. It looks like it is pretty difficult to
get a drive train to go between the pumps.
http://www.kclague.net/SSCorpion/P6050199.JPG
This next picture was supposed to show you the inner core up close, but there is
so much black it is hard to see things very well.
http://www.kclague.net/SSCorpion/P6050202.JPG
I have not done the test drive to compare yet.
The pumps do not achieve full range of motion. They expand completely, but do
not contract completely. This is because the pistons are not perfectly placed
away from the center, so the extra length of the unused throw allows the small
pulley that hooks all the pistons together to twist.
I’ll update you on the performance comparison as soon as I get data.
It was much nicer looking before I put the hoses on. I’ll have to work on a
more symmetric connection design to increase beauty.
Feedback?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
I know how much Steve likes to wait, so......
|
| |
The pumps do not achieve full range of motion. They expand completely, but
do not contract completely. This is because the pistons are not perfectly
placed away from the center, so the extra length of the unused throw allows
the small pulley that hooks all the pistons together to twist.
|
I was wondering about that.
Wait, that doesn’t seem quite right.
They all connect together, and that assembly is attached to a medium pully,
right? So, the assembly moves back and forth (actually, in a circle) two full
studs. Is that the complete distance of travel for a small piston?
At each point in the circle, one piston should be fully extended, and another
fully contracted. So it shouldn’t be possible for the pully the are all
attached to, to twist.
Anyway, it looks nice. Have you run it?
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
ahh the comressor. create the heart of the beast. standing by.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> ahh the comressor. create the heart of the beast. standing by.
I swear. Eric reminds me of a manager. Every once-in-a-while, he sticks his
head in the door and asks how everything's doing. Before we can answer, he's on
his way to his next project... :)
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Eric Sophie wrote:
> > ahh the comressor. create the heart of the beast. standing by.
>
>
> I swear. Eric reminds me of a manager. Every once-in-a-while, he sticks his
> head in the door and asks how everything's doing. Before we can answer, he's on
> his way to his next project... :)
Chop Chop! I want to see @ss's and elbows! I want to see little dimples on your
swollen fingers! I want to be able to read the LEGO backwards on your finger
tips!
What do you mean a project of this kind has never been done before!
I walked to school up hill, backwards, when I was a kid, and I liked it!
We were so poor, I had one shoe and one boot, they called me Shoe-Bootty.
All my MOCS were rainbow colored and I liked it!
Now get my coffe and begin programing the Gait Matrix or no one goes home!
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
I know how much Steve likes to wait, so......
|
| |
The pumps do not achieve full range of motion. They expand completely, but
do not contract completely. This is because the pistons are not perfectly
placed away from the center, so the extra length of the unused throw allows
the small pulley that hooks all the pistons together to twist.
|
I was wondering about that.
Wait, that doesn’t seem quite right.
|
I know.
| |
They all connect together, and that assembly is attached to a medium pully,
right? So, the assembly moves back and forth (actually, in a circle) two
full studs. Is that the complete distance of travel for a small piston?
|
The medium pulley connects the six pump arms into an assembly that is moved
around by the 40T gear. The radius of the circle swept by the inner pin holes
is 1.5 studs, not 2. So the pumps only travel 3/4 of the maximum distance.
The off-center axle holes of the 40T are the right distance, but present a
problem because they are axle holes (and thus won’t let the small pulleys twist
like they have to.
I think I can get to a better geometry using 1x4 thin liftarms attached to the
axle hole of the 40T. This will make the compressor wider, but that is not too
much of an issue.
| |
At each point in the circle, one piston should be fully extended, and another
fully contracted. So it shouldn’t be possible for the pully the are all
attached to, to twist.
|
Right. That is what I was trying to say above but stated it wrong.......
| |
Anyway, it looks nice. Have you run it?
|
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
I know how much Steve likes to wait, so......
|
| |
The pumps do not achieve full range of motion. They expand completely, but
do not contract completely. This is because the pistons are not perfectly
placed away from the center, so the extra length of the unused throw allows
the small pulley that hooks all the pistons together to twist.
|
I was wondering about that.
Wait, that doesn’t seem quite right.
They all connect together, and that assembly is attached to a medium pully,
right? So, the assembly moves back and forth (actually, in a circle) two
full studs. Is that the complete distance of travel for a small piston?
At each point in the circle, one piston should be fully extended, and another
fully contracted. So it shouldn’t be possible for the pully the are all
attached to, to twist.
|
I had to steal cams from my son, but I improved the geometry. I cannot figure
out where all my cams went.......
Improved geometry.
http://www.kclague.net/SSCorpion/P6050011.JPG
I’ll test it soon.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
-snip-
| |
Improved geometry.
http://www.kclague.net/SSCorpion/P6050011.JPG
I’ll test it soon.
Kevin
|
WOW! That is genious, you get to go home at 4:45 today.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
That is just too cool! I hope it does well in your tests, it’s just too pretty
not to... :-) Of course, I only have like 1/3 the pumps necessary to build it,
so I’ll have to order two more and make the half-sided version.
Cheers,
Mark (almost overcooked one side of tri-tip roast ogling over the pictures! :-0)
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Mark Riley wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
That is just too cool! I hope it does well in your tests, it’s just too
pretty not to... :-) Of course, I only have like 1/3 the pumps necessary to
build it, so I’ll have to order two more and make the half-sided version.
|
Check with DACTA on their small pump/small piston service pack. They are about
$10 and you get pump, piston *and* hoses. For the same price you can get a pump
only on bricklink.
| |
Cheers,
Mark (almost overcooked one side of tri-tip roast ogling over the pictures!
:-0)
|
Thanks for the positive feedback. Soory about the roast! LOL! I really like
the look. Unfortunatly the initial results are disappointing.
I have to build a small pump tester, because it is my belief that a few of my
small pumps are faulty...... I’ve tried small pumps in the past (trying to run
them as fast as possible), and they stopped working so well. I think the seals
aren’t so robust.
I need to come up with some benchmarks: maximum deliverable pressure,
leakage..... and others.
On the as fast as possible compressors the pumps got *very* hot..... which is
why I was shooting for six small pumps per large pump, just to keep the pump
rate low enough to keep the heat down.
The RC racer motors have no problem cranking the rotary compressor around, but
my inchworm makes it for about one complete walk cycle and then just hangs. The
compressor keeps running, but nothing happens to the inchworm. I must have a
leak.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Mark Riley wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
That is just too cool! I hope it does well in your tests, it’s just too
pretty not to... :-) Of course, I only have like 1/3 the pumps necessary
to build it, so I’ll have to order two more and make the half-sided version.
|
Check with DACTA on their small pump/small piston service pack. They are
about $10 and you get pump, piston *and* hoses. For the same price you can
get a pump only on bricklink.
|
Here is a link:
http://www.pldstore.com/pld/catalog.cfm?dest=itempg&itemid=8265&secid=77&linkon=subsection&linkid=216
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Sometimes it is not easy to get perfect geometry out of LEGO.
I’ve been wrestling with geometries to get the pumps just the right distance
apart, and also having the compression strokes force the pumps through thier
full range.
I ended up using a little geometry and trignometry, and a C program to help run
through the possible geometric combinations...... Never done that before.
I’m getting closer. Given all the play in the central radial connector, we need
more than a two stud throw to compress the pistons. A radius of 1 is not enough
to completely expand/contract the pistons through the full range of motion. I
tried a radius of 1.5, but it was too much. By hooking 1x2 liftarms to 1x2
(perpendicularly) I’ve got a radius of the square root of 2 (more like 1.414).
It works pretty well, but the radius is just a little too long. I’ll see if I
can back the pistons out about .1 stud.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
Sometimes it is not easy to get perfect geometry out of LEGO.
I’ve been wrestling with geometries to get the pumps just the right distance
apart, and also having the compression strokes force the pumps through thier
full range.
|
This sort of work is much easier, if you’re working with larger distances.
Getting a circle between 2 and 3 studs wide to spin is NOT easy. Good luck.
| |
I ended up using a little geometry and trignometry, and a C program to help
run through the possible geometric combinations...... Never done that
before.
|
You should post a screen-shot or two. I’m interested to see what kind of data
you came up with. I’m sure it’s not written in a “presentable” format, but
personally, I really don’t care. I’d just like to see it. (Actually, I’m not
even interested in the exact data, I just want have a look at your thought
process...)
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Sometimes it is not easy to get perfect geometry out of LEGO.
> >
> > I've been wrestling with geometries to get the pumps just the right distance
> > apart, and also having the compression strokes force the pumps through thier
> > full range.
>
> This sort of work is much easier, if you're working with larger distances.
> Getting a circle between 2 and 3 studs wide to spin is NOT easy. Good luck.
Thanks..... Like I said using two 1x2's in an L shape got me the square root of
two (1.414) or diameter of 2.828..... All the holes in 1x2's are axle holes, so
the make the center connector of the radial compressor free to turn I had to use
a special part. I tried to find it on peeron, but no luck.
It has size pin holes around a central pin hole, same geometry as wedge belt
wheel except that the center hole is a pin hole, not an axle hold.
This morning I came up with the combination of a distance of 1.5 using a technic
CAM, combined with a 30 degree cutback (back towards the center) using this:
http://www.peeron.com/inv/parts/44374
It looks ugly, but it works quite well and provides very good diameter circle..
I'll get a picture up soon.
>
> >
> > I ended up using a little geometry and trignometry, and a C program to help
> > run through the possible geometric combinations...... Never done that
> > before.
>
> You should post a screen-shot or two. I'm interested to see what kind of
> data you came up with. I'm sure it's not written in a "presentable" format,
> but personally, I really don't care. I'd just like to see it. (Actually,
> I'm not even interested in the exact data, I just want have a look at your
> thought process...)
I was trying to study geometries using the technic liftarm rotor 3 blades....
http://www.peeron.com/inv/parts/44374
Assuming we create a hexagonal shale using six of them, and we can put spacers
between adjoining rotors, what kind of distances are there in the result.
Assuming an orientation like this, where A represents the spacers between the
rotors:
B
\__@ D
/
C @
A __/
\
What is the distance horizontal distance between the center of A to the center
of the spacer @D (center of the hexagon)? This one always turns out to be nice
integral multiples of 1/2 a stud. This was annoying at first because 1/2 stud
multiples were not helping me get the geometry I wanted. The assumption was I
was going to hook pistons at the center of A and B and have them point to the
center of the hex formed by the six rotors.
What is the vertical distance from the center of @D to the horizontal line
projected by rotor A, presuming we hook the pistons at the center of @C and @D
pointing toward the center of the circle. The distance from @C to the center of
the hex is the same as @D to the center of the hex.
These distance do not turn out to be nice multiples of 1/2 stud.
Here is the program I wrote to do the calculation of @D to center (+/- multiples
of 1/2 stud to see if we could get the distance we want).
#include "stdio.h"
#include "math.h"
main(int argc, char *argv[])
{
/* calculate pi and sin(60 degrees) */
double pi = -4*atan(-1);
double sin60 = sin(2*pi*60/360);
int L,M;
double h,x,y,l,m;
printf("pi = %g\n",pi);
printf("sin(60) = %g\n",sin60);
/* l is the amount of spacing between two rotors */
for (L = 0; L < 16; L++) {
l = L*0.5;
/* the hypotneus is two rotor arm lengths plus spacing */
h = 3 + 3 + l;
/* the vertical component of the hypoteneus */
/* soh, cah, toa */
/* in this case we have all the angles and the hypoteneus */
/* so I used soh = sin(a) = opposite over hyp */
/* a is 60 degrees, opposite is unknown. */
/* sin(60) = opposite / hyp */
/* opposite = hyp * sin(60) */
y = h * sin60;
/* the horizontal component */
x = sqrt(h*h - y*y);
/* print out spacing, hypoteneus and horizontal distance */
printf("L %3.2g h %3.2g x %3.2g y ",l,h,x);
/* for a range of stud distances going toward the center and
* away from the center staring at X,Y, print the distances */
for (M = -4; M < 5; M++) {
m = M * 0.5;
printf("(%3.2g) %6.4g ",m, y-m);
}
printf("\n");
}
}
I would have paid a lot more attention in trigonometry class if they'd given me
something interesting like this to solve..... Now I think trig is great!
I obviously added comments for presentation purposes. ;^)
In the end, I didn't need this information, because the 1/2 stud spacing that I
get from the center of A to the center of the hex is good. I just needed a
better radius for circle in the center.
On a personal note, I'm traveling out to Silicon Valley from the 26th through
the 1st. I have to be moved out of my current residence before then.....
bummer. Plus all my LEGO is unsorted (if your curious about *that*, email me).
Bottom line is I won't be making much more forward progress until July.
LEGO geometry sure can be challenging at times.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > > Sometimes it is not easy to get perfect geometry out of LEGO.
> > >
> > > I've been wrestling with geometries to get the pumps just the right distance
> > > apart, and also having the compression strokes force the pumps through thier
> > > full range.
> >
> > This sort of work is much easier, if you're working with larger distances.
> > Getting a circle between 2 and 3 studs wide to spin is NOT easy. Good luck.
>
> Thanks..... Like I said using two 1x2's in an L shape got me the square root of
> two (1.414) or diameter of 2.828..... All the holes in 1x2's are axle holes, so
> the make the center connector of the radial compressor free to turn I had to use
> a special part. I tried to find it on peeron, but no luck.
>
> It has size pin holes around a central pin hole, same geometry as wedge belt
^
six
> wheel except that the center hole is a pin hole, not an axle hold.
I found it on bricklink:
http://www.bricklink.com/catalogItemPic.asp?P=2695
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> I found it on bricklink:
>
> http://www.bricklink.com/catalogItemPic.asp?P=2695
Couldn't you have just used a pair of 1x2 flat liftarms linked to a pair of 1x3
flat liftarms to get you a pin hole in the right location to use the sheaves?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, David Laswell wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I found it on bricklink:
> >
> > http://www.bricklink.com/catalogItemPic.asp?P=2695
>
> Couldn't you have just used a pair of 1x2 flat liftarms linked to a pair of 1x3
> flat liftarms to get you a pin hole in the right location to use the sheaves?
Hi David,
I'm having a difficult time envisioning this. Could you create one and take a
picture?
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Airline flights offer long stretches of nothing to do. I use these times to
brainstorm into my my LEGO idea logbook.
On a flight to Boston, I figured out how to graphically design pneumatic
sequencers. This led to creations such as inchworm, quad242, and hex363.
On my recent flight from California I was pondering the sequencer used by
quad242 and hex363..... because I was planning on using this sequencer for
SSClagorpion.
The quad242/363 sequencer uses a 10 step sequence to achieve walking. Four of
the ten steps do not involve leg movement, but instead involve movement of
timing only pistons.
By staring at the sequencer and overlapping piston movements, I've eliminated
all four of the dead cycles and now have a six step sequencer with no dead
cycles. Below is a graph I used to develop this new circuit. Horiztonal lines in
the graph represent unchanging pistons. Backslashes represent contracting
pistons, and forward slashes represent expanding pistons.
| | | |_|_|_| Leg group 1 vertical timing piston
A |\|_|/| | | |
|_| | | |_|_| Leg group 1 vertical muscle pistons
B | |\|_|/| | |
|_|_|_| | | | Leg group 2 vertical timing piston
C | | | |\|_|/|
| |_|_|_| | | Leg group 2 vertical muscle pistons
D |/| | | |\|_|
| | | |_|_| |
E |_|_|/| | |\| All leg's horizontal muscle pistons.
1 2 3 4 5 6 <--- Step Number
Below is a graph showing the two leg groups horizontal and vertical movements.
We are looking in from the side at a leg from each leg group. Each horizontal
and vertical arrow (pardon the ascii art), represents a step in the timing
diagram above. Each arrow is tagged with the step number associated with the
graph above.
6 3
<-----A <-----A
1| LG1 |5 4| LG2 |2
V-----> V----->
3 6
The above graph leads to the following six step image sequence.
After step 1
....... .......
. . . . Piston D expands
X...... ......X
After step 2
....... ......X
. . . . Piston B contracts
X...... .......
After step 3
....... X......
. . . . Pistons E expand/contract
......X .......
After step 4
....... .......
. . . . Piston B expands
......X X......
After step 5
......X .......
. . . . Piston D contracts
....... X......
After step 6
X...... .......
. . . . Pistons E expand/contract
....... ......X
For those of you familiar with my method for describing pneumatic circuits I end
up with these equations.
Ac = BC~E
Ax = ~B
Bc = ~AD
Bx = A
Cc = ADE
Cx = ~D
Dc = B~C
Dx = C
Ec = ~D
Ex = ~B
The idea behind this design technique is to use a piston combined with one
switch to get an AND gate (credit to Mark Terrabain for this simple and elegant
concept). By combining piston's expanded/contracted states using AND gates, we
can implement the above formulas. These AND functions let us synchronize the
transitions from step to step, no matter how fast or slow pistons expand.
The purpose for pistons A and C are to make the vertical leg pistons B and D
always have pressure applied (so we don't have to use Steve Hassenplug's
mechanical leg lock). My initial circuits for quad242 sometimes have the
vertical leg muscle pistons pressurized all the time, and it would collapse
under its own weight. By adding pistons A and C (which are not always
pressured, but also are never weight bearing), we can control pistons B and D
and always have them be pressurized.
Quad242's and hex363's original circuit's were completely synchronized. This led
to the four dead cycles where pistons A and C were transitioning.
The new six step sequencer breaks the complete synchronization at two points in
the circuit to eliminate all dead cycles.
At the end of step 3, we expect pistons A and E to be expanded. These cause
piston B to expand and C to contract in step 4. This leads us to this formula
for piston C
Cc = AE
If we try to use this same formula for piston B's contract port, piston B will
not always be pressurized allowing it to collapse because it is weight bearing.
So for piston B we have to use this formula:
Bx = A
This now allows for a race in the pneumatic circuit. Piston C cannot contract
until both pistons A and E expand completly, but Piston B will expand whenever
piston A is expanded. If piston A expands more slowly or at the same rate as
pison E, pistons B and C will get change stimulus at the same time. But if
piston A expands more rapidly than piston E, Piston B will will start to expand
before piston C starts to contract. So piston B can race ahead of of piston C.
This means that piston B could start to put the foot down before the horizontal
sweep of piston E completes. I don't think this will be a huge issue unless
horizontal leg sweeps are twice as slow as leg drops. A small amount of overlap
between leg drop and horizontal sweep will be a non-issue.
Anyway... for anyone still reading this long diatribe, I think the new circuit
will work 40% faster than its predecessor.
I'm going to study to see if I can eliminate pistons A and C using Steve's
mechanical leg lock.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> Anyway... for anyone still reading this long diatribe, I think the new circuit
> will work 40% faster than its predecessor.
Sounds good. I think the whole thing will go faster, if there are less pistons
to move, because less air is required.
So, how many pistons are there? It looks like just the five. Can we put
sensors on pistons A & C to determine which state it's in? I know before, we
couldn't stop, or change direction, while all feet were down.
Also, we had discussed stopping the movement by stopping the timing pistons.
That will still be possible, right? (stop A or C?)
> I'm going to study to see if I can eliminate pistons A and C using Steve's
> mechanical leg lock.
I think the leg lock will still be needed. How much air pressure will be
required to hold up the SSClagorpion? (hard to say)
What will happen if the compressor is turned off? Will we be able to start it
again, or can the state machine go into an unknown state?
Our friend Nick Donaldson says leg locks are required.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Anyway... for anyone still reading this long diatribe, I think the new circuit
> > will work 40% faster than its predecessor.
>
>
> Sounds good. I think the whole thing will go faster, if there are less pistons
> to move, because less air is required.
>
> So, how many pistons are there? It looks like just the five. Can we put
> sensors on pistons A & C to determine which state it's in? I know before, we
> couldn't stop, or change direction, while all feet were down.
Piston A and C are not replicated. Piston B has three copies (making 4 legs in leg group 1). Piston D has three copies too. Piston E has seven copies (a total of 8).
>
> Also, we had discussed stopping the movement by stopping the timing pistons.
> That will still be possible, right? (stop A or C?)
Yes.
>
> > I'm going to study to see if I can eliminate pistons A and C using Steve's
> > mechanical leg lock.
>
> I think the leg lock will still be needed. How much air pressure will be
> required to hold up the SSClagorpion? (hard to say)
I want leg lock for when it has been shut off for a long time and is completely
depressurized. I think we can eliminate pistons A and C (only two but if we
don't need them because of mechanical lock, then toss them).
>
> What will happen if the compressor is turned off? Will we be able to start it
> again, or can the state machine go into an unknown state?
We should freeze the state machine when all 8 feet are down and mechanically
locked. This is at the end of step 1 and/or step 4. Eventually the compressor
will get to max pressure and shut itself off. After that we can shut off the
compressor.
>
> Our friend Nick Donaldson says leg locks are required.
I think they are, because it will be hard to get it started without it. Without
leg lock, gravity can force it into an invalid state (collapsing under its own
weight) and never recover.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Anyway... for anyone still reading this long diatribe, I think the new circuit
> > will work 40% faster than its predecessor.
>
>
> Sounds good. I think the whole thing will go faster, if there are less pistons
> to move, because less air is required.
But, we have the same number of pistons making the same number of changes. It
is faster because now more of the piston transitions happen at the same time.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> Airline flights offer long stretches of nothing to do. I use these times to
> brainstorm into my my LEGO idea logbook.
-Snip-
Facinating, sheesh, your smart.
I see the beauty.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Well, I've finished moving into my new place. One more roadblock to LEGO
building removed.
I had to unsort all my LEGO a few weeks ago. The sort has started. So far I've
got detailed sort of technic axles, gears, connectors, pulleys, electrical,
pneumatic and pins. I figure I'm about 1/3 done. One of the things I realized
is that I have more technic bricks (studded) than lift arms (studless). Weird
for a guy that is such a liftarm fan.
I took MOCs on my work trip to California to show co-workers and friends. I got
stopped many times in the hallways at work by curious onlooking engineers. That
was fun.
I also took the MOCs to the public library for LEGO day. Lots of fun! Very
curious kids. Parents were often concerned that the kids would break the MOCs.
I assured them that they are LEGO and can be easily be rebuilt.
I think I even made it into the local newspaper (neighboring town).
It is nice to have time for LEGO again. I think my schedule will allow me to go
to BrickFestDC!
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> Well, I've finished moving into my new place. One more roadblock to LEGO
> building removed.
True that!
> I had to unsort all my LEGO a few weeks ago. The sort has started. So far I've
> got detailed sort of technic axles, gears, connectors, pulleys, electrical,
> pneumatic and pins. I figure I'm about 1/3 done. One of the things I realized
> is that I have more technic bricks (studded) than lift arms (studless). Weird
> for a guy that is such a liftarm fan.
tsk tsk
> I took MOCs on my work trip to California to show co-workers and friends. I got
> stopped many times in the hallways at work by curious onlooking engineers. That
> was fun.
:)
> I also took the MOCs to the public library for LEGO day. Lots of fun! Very
> curious kids. Parents were often concerned that the kids would break the MOCs.
> I assured them that they are LEGO and can be easily be rebuilt.
>
> I think I even made it into the local newspaper (neighboring town).
Wow, how great is that! Champion Lego Fans doing their duty.
> It is nice to have time for LEGO again. I think my schedule will allow me to go
> to BrickFestDC!
>
> Kevin
Wonderful, maybe we can hold a Session after all.
In this time of rejoyce, let us take a minute to remember the reasons for our
little project with the funny name.
To bring a more organic pursuit to Kevin's designs. To add some modicom of
Biomechanical Bricks to the Pneumatic creatures conjured by Master Clague.
Then our honor to have Sir Hassenplug help with possible designs schemes and
logic control. A great addition to really bring the ABS creature with the funny
name to life.
Me? ehh, I stick my head in the door every once in awhile like a manager and
say: asses and elbows get to work.
Until I get my hands on it to load it up with charm.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
>
> It is nice to have time for LEGO again. I think my schedule will allow me to go
> to BrickFestDC!
Excellent!! Any chance of SSClagorpion mk I travelling with you?
ROSCO
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Ross Crawford wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> >
> > It is nice to have time for LEGO again. I think my schedule will allow me to go
> > to BrickFestDC!
>
> Excellent!! Any chance of SSClagorpion mk I travelling with you?
All I have to show for SSClagorpion is two possible choices for compressor.
Once I pick a compressor, I can build the torso out from there.
SSClagorpion has been set aside because of preparations for BrickFest. I have
these things ready to show:
1. Pedmatic - my cute little small pneumatic piston biped.
2. Inchworm - (pneumatic) remodeled using yellow liftarms and green 40T gears.
The hoses have been tidied up quite a bit.
3. Large pump compressor.
4. Radial small pump compressor.
5. My tiny micromotor based walkers.
6. Dark Helmet.
7. Go-Rilla - my aggresive biped based on Dark Side Developer Kit.
8. PhD - I finally finished up the remake of hex363 into an omnidirectional
walker. It is totally pneumatic. It can walk in six directions and can turn
right or left. It can walk in a curve to the right or the left. It can also
walk in place n:^)
Photos and movies will be produced and made shortly after BrickFest.
Plus whatever else I can put together. I'm currently working on a remodel of
quad242. I never really liked quad242's feet. I hope to be able to put together
a reversible pneumatic engine.
I've been face down in LEGO and lovin' it!
>
> ROSCO
It's not too late to register for BrickFest!
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
I have
> these things ready to show:
-snip-
eggsalad.
Plus we'll be sitting down to discuss the project.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> > >
> > > It is nice to have time for LEGO again. I think my schedule will allow me to go
> > > to BrickFestDC!
> >
> > Excellent!! Any chance of SSClagorpion mk I travelling with you?
>
> All I have to show for SSClagorpion is two possible choices for compressor.
> Once I pick a compressor, I can build the torso out from there.
For those of you that missed SSClagorpion at Brickfest... well, sorry.
That was your first chance to get a glimps of the beast.
Ok, so it was really just the heart of the beast, and the heart wasn't pumping,
but that's not the point... :)
The three of us (and a couple others) had lunch on Saturday. That was nice, and
it kind of helped re-light the fire.
Time to get working, again...
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > > >
> > > > It is nice to have time for LEGO again. I think my schedule will allow me to go
> > > > to BrickFestDC!
> > >
> > > Excellent!! Any chance of SSClagorpion mk I travelling with you?
> >
> > All I have to show for SSClagorpion is two possible choices for compressor.
> > Once I pick a compressor, I can build the torso out from there.
>
>
> For those of you that missed SSClagorpion at Brickfest... well, sorry.
>
> That was your first chance to get a glimps of the beast.
>
> Ok, so it was really just the heart of the beast, and the heart wasn't pumping,
> but that's not the point... :)
I was in a rush getting ready for BrickFest. I changed over my radial
compressor from yellow to red (SSClagorpion's official color). In the process I
accidentally cut the hoses on four pumps. I've changed the outer bracing
structure so that this does not happen. I also modified the hexagonal structure
to make it stronger (the technic cam's were the weak link).
>
> The three of us (and a couple others) had lunch on Saturday. That was nice, and
> it kind of helped re-light the fire.
I spent a few days at my brother's in Boston, so I just got back from Brickfest.
It was a few days ride home, so I had time to brainstorm about SCClagorpion. I
also stopped by at Eric's house to see his LEGO home life. It was great!
>
> Time to get working, again...
Now who sounds like a manager? ;^)
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Kevin-
I am in the design phase of my crane (the Demag AC 500-1 SSL) and currently I am
working on the control system for the pneumatics. Following Ross Crawford's
idea, I came out with something like this:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=92653
I am trying to control four pneumatic pistons individually, and simultaneously
having them controlled by one master switch. Would this setup work? Any help
would be appreciated. Thanks.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Vineet Honkan wrote:
> Kevin-
>
> I am in the design phase of my crane (the Demag AC 500-1 SSL) and currently I am
> working on the control system for the pneumatics. Following Ross Crawford's
> idea, I came out with something like this:
>
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=92653
>
> I am trying to control four pneumatic pistons individually, and simultaneously
> having them controlled by one master switch. Would this setup work? Any help
> would be appreciated. Thanks.
Hi Vineet,
I'll see if I can help. Your desciption "control four pneumatic pistons
individually, and simultaneously having them controlled by one master switch"
does not seem to match the second diagram. The primary reason is that you have
four pistons, but you are not trying to control all four individually.
In fact you've logically only got two pistons because you've connected two
pistons together mechanically at the base, and pneumatically at the pressure
ports. By the mechanical and pneumatic combining, you've created one larger
piston with double the throw length.
You've got four switches to provide individual control of the two large
pistons, and one final master swtich, making a total of five switches to control
two pistons. Are any of these switches mechanically linked to each other?
I've looked at the picture a lot, and cannot discern what problem you are
trying to solve. I need a more detailed description of the problem.
A more detailed description of how your solution is supposed to work would
help a lot also.
Are you shooting for this?
Piston 1 expansion port gets pressure when the master switch says it gets
pressure, or when V1 says it gets pressure.
Piston 1 contraction port gets pressure when the master switch says it gets
pressure, or when V1 says it gets pressure.
Piston 2 expansion port gets pressure when the master switch says it gets
pressure, or when V2 says it gets pressure.
Piston 2 contract port gets pressure when the master switch says it gets
pressure, or when V2 says it gets pressure.
If so, then the isolation switches are also part of the master switch, right?
Have you built the above circuit to see if it does what you want?
I'm happy to help when I have enough info to work with. This looks like an
interesting problem.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
During Brick Fest 2004, the 3 Masters of the SSlagorpion got together for lunch
to discuss the current state of the project.
Kevin showed us his awesome radial compressor during his demos.
Steve spoke to us during lunch about logic control and possibly designing the
Arms and tail.
I smiled.
A post Brick Fest visit by Kevin made for some parts gathering at my house.
The current state of the beast:
The heart, or central air system has been completed. Radial Air Compressor.
Now, the Technic structure for the body is next. Kevin will branch off of the
surrounding structure of the compressor housing and work towards mounting the
legs to the central frame work.
The functionality described by Steve and Kevin was exciting to listen to.
Carry on gentleman. The beast shall rise.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
<SNIP>
> Kevin showed us his awesome radial compressor during his demos.
> Steve spoke to us during lunch about logic control and possibly designing the
> Arms and tail.
> I smiled. • <SNIP>
> Carry on gentleman. The beast shall rise.
Ok Is Kevin looking at using the Circa Brickfest compressor or the Design I gave
him mid August for the compact 12 Pump Radial Comprressor? Just curious.. I was
kinda hoping my design would be good enough to make the cut....
http://68.57.255.231/lego/models/RadialCompressor.html
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Joseph Greene wrote:
> In lugnet.technic, Eric Sophie wrote:
> <SNIP>
> > Kevin showed us his awesome radial compressor during his demos.
> > Steve spoke to us during lunch about logic control and possibly designing the
> > Arms and tail.
> > I smiled. <SNIP>
> > Carry on gentleman. The beast shall rise.
>
> Ok Is Kevin looking at using the Circa Brickfest compressor or the Design I gave
> him mid August for the compact 12 Pump Radial Comprressor? Just curious.. I was
> kinda hoping my design would be good enough to make the cut....
>
> http://68.57.255.231/lego/models/RadialCompressor.html
Hi Joseph,
I'm interested in sticking with my own design, primarily because it is my
design. You design is very compact and especially good looking though and I
compliment you on it.
Right now, propgress on SSClagorpion is on hold. My personal life is very
busy again. Worst case scenario on the divorce is November, but until thenm,
I'm very busy.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Ok, It's December now...any status changes? I've gotten exhausted holding my
breath, so I've begun my own.. but must wait until January to buy the rest of
the parts I need...
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Joseph Greene wrote:
> > In lugnet.technic, Eric Sophie wrote:
> > <SNIP>
> > > Kevin showed us his awesome radial compressor during his demos.
> > > Steve spoke to us during lunch about logic control and possibly designing the
> > > Arms and tail.
> > > I smiled. <SNIP>
> > > Carry on gentleman. The beast shall rise.
> >
> > Ok Is Kevin looking at using the Circa Brickfest compressor or the Design I gave
> > him mid August for the compact 12 Pump Radial Comprressor? Just curious.. I was
> > kinda hoping my design would be good enough to make the cut....
> >
> > http://68.57.255.231/lego/models/RadialCompressor.html
>
> Hi Joseph,
>
> I'm interested in sticking with my own design, primarily because it is my
> design. You design is very compact and especially good looking though and I
> compliment you on it.
>
> Right now, propgress on SSClagorpion is on hold. My personal life is very
> busy again. Worst case scenario on the divorce is November, but until thenm,
> I'm very busy.
>
> Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Hi Joseph,
There is not much for new news. I have done some study of "limited throw"
pneumatics. One of the things that makes the larger pneumatic pistons slower
than the small ones is the 6x volume difference compared to small pistons.
The travel distance of the large piston is larger than the distance traveled
by a handle on a switch. By limiting the piston throw to the distance of the
switch throw, then you effectively reduce the volume of the large piston. It
also provides improved reliability. The large pistons tend to leak when fully
expanded. The increased leverage makes it easier to break the seal.
I've asked Santa for many red LEGO technic sets this year, and plan to start
working again soon.
Real life has been getting in the way of LEGO lately. It is work again. I'm
getting paid to perform unnatural acts (OK, pretending I'm alpha particles) with
computers.
Kevin
In lugnet.technic, Joseph Greene wrote:
> Ok, It's December now...any status changes? I've gotten exhausted holding my
> breath, so I've begun my own.. but must wait until January to buy the rest of
> the parts I need...
>
>
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Joseph Greene wrote:
> > > In lugnet.technic, Eric Sophie wrote:
> > > <SNIP>
> > > > Kevin showed us his awesome radial compressor during his demos.
> > > > Steve spoke to us during lunch about logic control and possibly designing the
> > > > Arms and tail.
> > > > I smiled. <SNIP>
> > > > Carry on gentleman. The beast shall rise.
> > >
> > > Ok Is Kevin looking at using the Circa Brickfest compressor or the Design I gave
> > > him mid August for the compact 12 Pump Radial Comprressor? Just curious.. I was
> > > kinda hoping my design would be good enough to make the cut....
> > >
> > > http://68.57.255.231/lego/models/RadialCompressor.html
> >
> > Hi Joseph,
> >
> > I'm interested in sticking with my own design, primarily because it is my
> > design. You design is very compact and especially good looking though and I
> > compliment you on it.
> >
> > Right now, propgress on SSClagorpion is on hold. My personal life is very
> > busy again. Worst case scenario on the divorce is November, but until thenm,
> > I'm very busy.
> >
> > Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Well I have a leg design at current using 2 large cylinders that gets ~21
cycles/minute with 1 leg and a 6 way radial pump (I don't have enough pumps to
fill out the full 12 way...) but it's sturdy and strong and fully self
cycling...the problem is working a circuit to have 4 legs moving in tandem at a
time.. so I'm looking into a linkage design to handle the forward-backward
motion and a wired linkage design for the up-down motion..., how are you
planning your legs? individual motion with cylinders on all? how many
cylinders/leg?
The travel on a large cylinder seems to be ~5 studs, while the switch throw is
3 end to end.. is that about right?
I've found I can avoid the leakage if I'm using the cylinders in oblique angles,
thus minimizing the leteral torque, but I coud be wrong...
Mine is mostly Black and yellow as that is what I have the most of.. alas some
white has intruded as well...
Given my current design, it's going to be huge.. on the order of 2'x3'... does
that sound similar?
In lugnet.technic, Kevin L. Clague wrote:
> Hi Joseph,
>
> There is not much for new news. I have done some study of "limited throw"
> pneumatics. One of the things that makes the larger pneumatic pistons slower
> than the small ones is the 6x volume difference compared to small pistons.
>
> The travel distance of the large piston is larger than the distance traveled
> by a handle on a switch. By limiting the piston throw to the distance of the
> switch throw, then you effectively reduce the volume of the large piston. It
> also provides improved reliability. The large pistons tend to leak when fully
> expanded. The increased leverage makes it easier to break the seal.
>
> I've asked Santa for many red LEGO technic sets this year, and plan to start
> working again soon.
>
> Real life has been getting in the way of LEGO lately. It is work again. I'm
> getting paid to perform unnatural acts (OK, pretending I'm alpha particles) with
> computers.
>
> Kevin
>
>
>
> In lugnet.technic, Joseph Greene wrote:
> > Ok, It's December now...any status changes? I've gotten exhausted holding my
> > breath, so I've begun my own.. but must wait until January to buy the rest of
> > the parts I need...
> >
> >
> > In lugnet.technic, Kevin L. Clague wrote:
> > > In lugnet.technic, Joseph Greene wrote:
> > > > In lugnet.technic, Eric Sophie wrote:
> > > > <SNIP>
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Joseph Greene wrote:
> Well I have a leg design at current using 2 large cylinders that gets ~21
> cycles/minute with 1 leg and a 6 way radial pump (I don't have enough pumps to
> fill out the full 12 way...) but it's sturdy and strong and fully self
> cycling...the problem is working a circuit to have 4 legs moving in tandem at a
> time.. so I'm looking into a linkage design to handle the forward-backward
> motion and a wired linkage design for the up-down motion..., how are you
> planning your legs? individual motion with cylinders on all? how many
> cylinders/leg?
21 cyles per second is good. It will go much slower with 7 more legs.
Do you plan on having all the legs be self cycling? How will the legs stay
coordinated?
I plan on one pison for vertical, and one (maybe two) for horizontal. Do you
know the lock mechanism used on folding chairs and folding tables? I plan on
using that mechanism to lock legs into vertical down position.
I'm interested in hearing about your wired leg design. Using all LEGO parts? I
tend to stay away from modified or non-LEGO parts.
> The travel on a large cylinder seems to be ~5 studs, while the switch throw is
> 3 end to end.. is that about right?
Yes, so I'll need to only move 3/5 the volume of air needed in full throw
designs.
> I've found I can avoid the leakage if I'm using the cylinders in oblique angles,
> thus minimizing the leteral torque, but I coud be wrong...
In PhD hexapod walker, I had reliability problems because of the sheer number
parts involved: 12 large pistons, 4 small pistons, 26 switches for leg piston
instrumentation, and 48 switches for behavior modification.
> Mine is mostly Black and yellow as that is what I have the most of.. alas some
> white has intruded as well...
In general try to stay away from black, because it is hard to take pictures of,
and see the internal design.
> Given my current design, it's going to be huge.. on the order of 2'x3'... does
> that sound similar?
Yes, huge it is. The radial compressors, plus two RCX's, and the 8 legs make
for a large design.
I tried to make an inchworm out of small pneumatics (to make things faster), but
it had so much reliablity problems, I could never get it to work.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Joseph Greene wrote:
> > Well I have a leg design at current using 2 large cylinders that gets ~21
> > cycles/minute with 1 leg and a 6 way radial pump (I don't have enough pumps to
> > fill out the full 12 way...) but it's sturdy and strong and fully self
> > cycling...the problem is working a circuit to have 4 legs moving in tandem at a
> > time.. so I'm looking into a linkage design to handle the forward-backward
> > motion and a wired linkage design for the up-down motion..., how are you
> > planning your legs? individual motion with cylinders on all? how many
> > cylinders/leg?
>
> 21 cyles per second is good. It will go much slower with 7 more legs.
Yeah, I'm estimating 1~2 cycles per minute with all 8.
>
> Do you plan on having all the legs be self cycling? How will the legs stay
> coordinated?
The very reason I'm looking at a linkage solution....
>
> I plan on one pison for vertical, and one (maybe two) for horizontal. Do you
> know the lock mechanism used on folding chairs and folding tables? I plan on
> using that mechanism to lock legs into vertical down position.
>
> I'm interested in hearing about your wired leg design. Using all LEGO parts? I
> tend to stay away from modified or non-LEGO parts.
All lego accept possibly for the string/wire with crimped loops to loop over
pins.
MODIFIED LEGO! Never.. Back back.. foul fiends! The Lego is sacred.. ok.. just
kidding, I'm not that crazy, but close.. the only deliberately modified Lego
piece I own is and axle joiner which wa sheated on one end to form it so I could
attach a 12 turn RC motor to my Lego.. it's disastrous results cured me forever
of the modding urge.
> > The travel on a large cylinder seems to be ~5 studs, while the switch throw is
> > 3 end to end.. is that about right?
>
> Yes, so I'll need to only move 3/5 the volume of air needed in full throw
> designs. • Hmm.. I'll think on that a bit...
>
> > I've found I can avoid the leakage if I'm using the cylinders in oblique angles,
> > thus minimizing the leteral torque, but I coud be wrong...
>
> In PhD hexapod walker, I had reliability problems because of the sheer number
> parts involved: 12 large pistons, 4 small pistons, 26 switches for leg piston
> instrumentation, and 48 switches for behavior modification.
>
> > Mine is mostly Black and yellow as that is what I have the most of.. alas some
> > white has intruded as well...
>
> In general try to stay away from black, because it is hard to take pictures of,
> and see the internal design.
I LDraw a lot of it anyway...
> > Given my current design, it's going to be huge.. on the order of 2'x3'... does
> > that sound similar?
>
> Yes, huge it is. The radial compressors, plus two RCX's, and the 8 legs make
> for a large design.
>
> I tried to make an inchworm out of small pneumatics (to make things faster), but
> it had so much reliablity problems, I could never get it to work.
>
> Kevin
Hmm..
inchworm... hmm...
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
> > In lugnet.technic, Joseph Greene wrote:
> > > Mine is mostly Black and yellow as that is what I have the most of.. alas some
> > > white has intruded as well...
> >
> > In general try to stay away from black, because it is hard to take pictures of,
> > and see the internal design.
>
>
> I LDraw a lot of it anyway...
I don't think Kevin knows how to use LDraw. :)
Kevin, we need to talk about the next 'step' for SSClagorpion...
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
I'm just checking the inside of my eyelids for leaks.
e
THE BEAST WILL LIVE.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> I'm just checking the inside of my eyelids for leaks.
>
> e
>
>
> THE BEAST WILL LIVE.
Aye it shall, even if I have to throw large amounts of $ at Lego to get the
parts to do so.. it shall! It seems my Lego collection is too eclectic to have
enough to finish it right now.. but I'm working on one...
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Joseph Greene wrote:
> Aye it shall, even if I have to throw large amounts of $ at Lego to get the
> parts to do so.. it shall! It seems my Lego collection is too eclectic to have
> enough to finish it right now.. but I'm working on one...
You guys might be interested in this beast...
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=60696
ROSCO
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
> You guys might be interested in this beast...
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=60696
Thanks.
Here's a few observations (more or less "from what I can see...")
- The compressor (on top) uses 12 small cylinders
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551846
- It has 2 battery boxes
- The legs lock, and are driven up & down by pneumatics, one cylinder to raise/lower
and another to lock.
- Up: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551845
- Down: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551844
- The legs are driven forward/backward by motors->znap
flex-axles/u-joints->wormgear->turntables
- The leg pneumatics are driven from cams, which run off the main motors. So the
forward/back motion would be sync-ed with the up/down via cams. Springs are used to
keep the switches against the cams
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551860
- Each leg is only connected to 2 pneumatic hoses
- The feet swivel
- From some pictures, it doesn't look like the legs are connected directly together:
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551817
- But they are: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551858
- Transmission type shifting is used for forward/back leg motion (see above)
- The Claw is only decorative http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551840
:)
- There is no "controller"
Comments:
This is a nice piece, but, personally, I'm not too fond of using the transmission to
shift the direction of leg movement, or for that matter, the whole worm->turntable
assembly.
Don't get me wrong, I'd love to see it walk, and it's better than any walker I've
ever made... but then again, I've never made a walker...
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> > You guys might be interested in this beast...
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=60696
>
> Thanks.
>
> Here's a few observations (more or less "from what I can see...")
> - The compressor (on top) uses 12 small cylinders
> http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551846
Wonderfully compact.
>
> - It has 2 battery boxes
>
> - The legs lock, and are driven up & down by pneumatics, one cylinder to raise/lower
> and another to lock.
> - Up: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551845
> - Down: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551844
>
> - The legs are driven forward/backward by motors->znap
> flex-axles/u-joints->wormgear->turntables
> - The leg pneumatics are driven from cams, which run off the main motors. So the
> forward/back motion would be sync-ed with the up/down via cams. Springs are used to
> keep the switches against the cams
There does not seem to be any guaranteed synchronization between the up down
mechanism and the forward back. Slow pistons might not hit the ground before
the front back transistions start.
> http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551860
>
> - Each leg is only connected to 2 pneumatic hoses
That is nice and tidy.
>
> - The feet swivel
Yes, I have a quadraped with swiveling feet and it makes a big difference on
traction.
>
> - From some pictures, it doesn't look like the legs are connected directly together:
> http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551817
>
> - But they are: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551858
>
> - Transmission type shifting is used for forward/back leg motion (see above)
>
> - The Claw is only decorative http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551840
> :)
>
> - There is no "controller"
>
> Comments:
> This is a nice piece, but, personally, I'm not too fond of using the transmission to
> shift the direction of leg movement, or for that matter, the whole worm->turntable
> assembly.
>
> Don't get me wrong, I'd love to see it walk, and it's better than any walker I've
> ever made... but then again, I've never made a walker...
Steve,
I think you should give it a try. Bipeds are the big challenge if you ask me.
The octopod is an impressive piece of work. You'll be happy to know that
bricklink orders are starting to arrive so I have enough red pieces to complete
all eight legs in red. I've started to merge the RCXs, scout and radial
compressor into the body.
I'd like to avoid your standard rectangular body if possible. They look so
unnatural.
My leg design has lock, but it is using the folding table leg technique you
suggested.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
<snip>
> > - The compressor (on top) uses 12 small cylinders
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551846
>
> Wonderfully compact.
Almost as compact as my radial.. which I've developed /developing 3 and 6
cylinder versions as well.. the 3cyl radial is 12x13x4 studs and can easily be
run with any motor (even the micro), but the 9V RC motor seems to eat batteries
at a rate of a 6pack per 5 minutes, however it produces roughly 60 rpm on the 2
cylinder pneumatic wheel (steam engine style from Dr Soh's site).
<snip>
> > - The leg pneumatics are driven from cams, which run off the main motors. So the
> > forward/back motion would be sync-ed with the up/down via cams. Springs are used to
> > keep the switches against the cams
>
> There does not seem to be any guaranteed synchronization between the up down
> mechanism and the forward back. Slow pistons might not hit the ground before
> the front back transistions start.
I'm working on and 8 stage..
legs operating in 2 sets of 4 (A and B) with 2 motions each (Up/Down
Forward/Reverse) with control switches (SW1-4 Extended/Retracted).. :
AD -> SW1 Ext ->
AF -> SW2 Ext ->
BU -> SW3 Ext ->
BR -> SW4 Ext ->
BD -> SW3 Ret ->
BF -> SW4 Ret ->
AU -> SW1 Ret ->
AR -> SW2 Ret ->
AD
The idea being that each switch consists of 4 small cylinders, no 1 of which can
flip a pneumatic switch by itself (at least non of mine seem to be able to),
thus mathematically if all 4 are pressurized at all times no less than 3, fully
pressurized in a specific direction can flip the switch (even if 2 are in one
direction that leaves 2 in the other.. so at best when 3 are pressurized, they
might be able to overcome the last one and leave it slightly off sync)
Ok... so it is untested...I need another Backhoe and another 6 dacta pneumatic
service packs to finish it...maybe when the taxes come in..
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551860
> >
> > - Each leg is only connected to 2 pneumatic hoses
>
> That is nice and tidy.
I wish... mine is gonna be hose city...
> >
> > - The feet swivel
>
> Yes, I have a quadraped with swiveling feet and it makes a big difference on
> traction.
Does it ever.. my quadruped high stepper (4" step height) can almost climb my
carpeted stairs with his u-jointed feet..
<SNIP>
> > Comments:
> > This is a nice piece, but, personally, I'm not too fond of using the transmission to
> > shift the direction of leg movement, or for that matter, the whole worm->turntable
> > assembly.
> >
> > Don't get me wrong, I'd love to see it walk, and it's better than any walker I've
> > ever made... but then again, I've never made a walker...
>
> Steve,
>
> I think you should give it a try. Bipeds are the big challenge if you ask me.
Bipeds Rock! (Usually front to back or side to side).. seriously they are a fun
challenge...
> The octopod is an impressive piece of work. You'll be happy to know that
> bricklink orders are starting to arrive so I have enough red pieces to complete
> all eight legs in red. I've started to merge the RCXs, scout and radial
> compressor into the body.
Huzzah!
Wow.. I'm trying to do it with the Mana IR units...I think yours will be more
impressive.
> I'd like to avoid your standard rectangular body if possible. They look so
> unnatural.
I'm looking at something like an irregular Hexagon, or possibly Octagon for
mine...
>
> My leg design has lock, but it is using the folding table leg technique you
> suggested.
Hm.. my legs have no lock...we'll have to see how it does...
>
> Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Joseph Greene wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> <snip>
> > > - The compressor (on top) uses 12 small cylinders
> > > http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551846
> >
> > Wonderfully compact.
>
> Almost as compact as my radial.. which I've developed /developing 3 and 6
> cylinder versions as well.. the 3cyl radial is 12x13x4 studs and can easily be
> run with any motor (even the micro), but the 9V RC motor seems to eat batteries
> at a rate of a 6pack per 5 minutes, however it produces roughly 60 rpm on the 2
> cylinder pneumatic wheel (steam engine style from Dr Soh's site).
Awesome.
>
> <snip>
>
> > > - The leg pneumatics are driven from cams, which run off the main motors. So the
> > > forward/back motion would be sync-ed with the up/down via cams. Springs are used to
> > > keep the switches against the cams
> >
> > There does not seem to be any guaranteed synchronization between the up down
> > mechanism and the forward back. Slow pistons might not hit the ground before
> > the front back transistions start.
>
> I'm working on and 8 stage..
> legs operating in 2 sets of 4 (A and B) with 2 motions each (Up/Down
> Forward/Reverse) with control switches (SW1-4 Extended/Retracted).. :
> AD -> SW1 Ext ->
> AF -> SW2 Ext ->
> BU -> SW3 Ext ->
> BR -> SW4 Ext ->
> BD -> SW3 Ret ->
> BF -> SW4 Ret ->
> AU -> SW1 Ret ->
> AR -> SW2 Ret ->
> AD
Are the down legs coming up at the same time as the up legs are coming down?
Sclagorpion will have all 8 legs down, then pick four of them up, shift, and put
them back down before lifting the other four. This way the body does not go up
and down as part of the walking cycle...
>
> The idea being that each switch consists of 4 small cylinders, no 1 of which can
> flip a pneumatic switch by itself (at least non of mine seem to be able to),
I have had luck with two small pistons flipping a switch.
> thus mathematically if all 4 are pressurized at all times no less than 3, fully
> pressurized in a specific direction can flip the switch (even if 2 are in one
> direction that leaves 2 in the other.. so at best when 3 are pressurized, they
> might be able to overcome the last one and leave it slightly off sync)
> Ok... so it is untested...I need another Backhoe and another 6 dacta pneumatic
> service packs to finish it...maybe when the taxes come in..
Yes, it probably walks faster than my synchronized walkers.
I use two switches per large piston. One switch instruments when the piston is
closed, and the other when it is open. The switches can be hooked in series to
know when all four legs have transitioned forward and back.
It never makes the next transition until all the pistons have completed their
travel.
I use two pistons per leg. One for vertical and one for horizontal..... Almost
all the pistons are muscle pistons, but I need two switches (and pistons to
drive them) that provide the proper timing of the overall circuit. Rather than
have a central timer that the muscle pistons mimic, the muscle pistons are the
timing pistons.
You can never have too much pneumatics.
Kevin
>
>
>
>
>
>
>
> > > http://www.brickshelf.com/cgi-bin/gallery.cgi?i=551860
>
> > >
> > > - Each leg is only connected to 2 pneumatic hoses
> >
> > That is nice and tidy.
>
> I wish... mine is gonna be hose city...
Mine too. Two pistons, four switches, makes 12 hoses per leg.
>
> > >
> > > - The feet swivel
> >
> > Yes, I have a quadraped with swiveling feet and it makes a big difference on
> > traction.
>
> Does it ever.. my quadruped high stepper (4" step height) can almost climb my
> carpeted stairs with his u-jointed feet..
Interesting.. Ujoint lets it flex whatever way it wants? No springs to try to
hold it in position.
>
> <SNIP>
>
> > > Comments:
> > > This is a nice piece, but, personally, I'm not too fond of using the transmission to
> > > shift the direction of leg movement, or for that matter, the whole worm->turntable
> > > assembly.
> > >
> > > Don't get me wrong, I'd love to see it walk, and it's better than any walker I've
> > > ever made... but then again, I've never made a walker...
> >
> > Steve,
> >
> > I think you should give it a try. Bipeds are the big challenge if you ask me.
>
> Bipeds Rock! (Usually front to back or side to side).. seriously they are a fun
> challenge...
I really enjoy them. I've run dry on ideas for a while which is why I went to
quads.
>
> > The octopod is an impressive piece of work. You'll be happy to know that
> > bricklink orders are starting to arrive so I have enough red pieces to complete
> > all eight legs in red. I've started to merge the RCXs, scout and radial
> > compressor into the body.
>
>
> Huzzah!
> Wow.. I'm trying to do it with the Mana IR units...I think yours will be more
> impressive.
Its sure planned to have a *lot* of stuff.
>
> > I'd like to avoid your standard rectangular body if possible. They look so
> > unnatural.
>
> I'm looking at something like an irregular Hexagon, or possibly Octagon for
> mine...
Cool. I could see that....Gotta see what we can do with 3-4-5 trianges.
>
> >
> > My leg design has lock, but it is using the folding table leg technique you
> > suggested.
>
> Hm.. my legs have no lock...we'll have to see how it does...
We figure it weighs so much we have to have locks so that it can stand up
without pressure.
> >
> > Kevin
Thanks for the inspiration Joe...
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Joseph Greene wrote:
> >
> > I'm looking at something like an irregular Hexagon, or possibly Octagon for
> > mine...
>
> Cool. I could see that....Gotta see what we can do with 3-4-5 trianges.
If you use a regular hexagon, the radial compressor would look awesome mounted
on its side in the centre.
ROSCO
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Joseph Greene wrote:
> > In lugnet.technic, Kevin L. Clague wrote: • <snip>
> >
> > I'm working on and 8 stage..
> > legs operating in 2 sets of 4 (A and B) with 2 motions each (Up/Down
> > Forward/Reverse) with control switches (SW1-4 Extended/Retracted).. :
> > AD -> SW1 Ext ->
> > AF -> SW2 Ext ->
> > BU -> SW3 Ext ->
> > BR -> SW4 Ext ->
> > BD -> SW3 Ret ->
> > BF -> SW4 Ret ->
> > AU -> SW1 Ret ->
> > AR -> SW2 Ret ->
> > AD
>
> Are the down legs coming up at the same time as the up legs are coming down?
>
> Sclagorpion will have all 8 legs down, then pick four of them up, shift, and put
> them back down before lifting the other four. This way the body does not go up
> and down as part of the walking cycle...
Yeah, Im looing to isolate each movement completely and have it so the body
doesn't have a grav well. I'm not 100% on the orderit may be that instead of AD
going to AF, I do AD, -> BU -> AF -> BR -> BD -> AU -> BF -> AR -> AD (would
certainly be more sensible), I might eliminate 1 switch by coupling the AF,BR
and BF,AR pairs
>
>
> >
> > The idea being that each switch consists of 4 small cylinders, no 1 of which can
> > flip a pneumatic switch by itself (at least non of mine seem to be able to),
>
> I have had luck with two small pistons flipping a switch.
Agreed, which is why I think a 4 piston switch would work awesomm it would, with
the mechanical stifness and the fact that all cylinders are pressurized in one
direction or the other at all times, prevent anything less than a clear majority
of the pistons (3 of 4) flipping the switch. While a unanimity could do so
handily and quickly.
> > Ok... so it is untested...I need another Backhoe and another 6 dacta pneumatic
> > service packs to finish it...maybe when the taxes come in..
> Yes, it probably walks faster than my synchronized walkers.
> I use two switches per large piston. One switch instruments when the piston is
> closed, and the other when it is open. The switches can be hooked in series to
> know when all four legs have transitioned forward and back.
>
> It never makes the next transition until all the pistons have completed their
> travel.
>
> I use two pistons per leg. One for vertical and one for horizontal..... Almost
> all the pistons are muscle pistons, but I need two switches (and pistons to
> drive them) that provide the proper timing of the overall circuit. Rather than
> have a central timer that the muscle pistons mimic, the muscle pistons are the
> timing pistons.
Hmm...my muscle pistons are only part of the timing reporting pneumatically to a
central timer...I'll have to see if I can wrap my mind aound how to get
themworking without a timer circuit...
>
> You can never have too much pneumatics.
I can't ever seem to have enough.. and the blamed cats have a hose fetish.. ARG.
<snip>
> > I wish... mine is gonna be hose city...
> Mine too. Two pistons, four switches, makes 12 hoses per leg.
Hmm. 2 pistons 2 switches per leg.. but still10 hoses per leg here.. and all
feeding off into the body...it's a regular circulation system...
> > > > - The feet swivel
> > > Yes, I have a quadraped with swiveling feet and it makes a big difference on
> > > traction.
> > Does it ever.. my quadruped high stepper (4" step height) can almost climb my
> > carpeted stairs with his u-jointed feet..
> Interesting.. Ujoint lets it flex whatever way it wants? No springs to try to
> hold it in position.
Well it is a custom ujoint I'll have to LDraw it up, and I do have itrubber
banded to provide a degree of stifness without significantly limiting it's
freedom..
> > <SNIP>
> I really enjoy them. I've run dry on ideas for a while which is why I went to
> quads.
I 've done Tripod through dodecapod succesfully...
> Cool. I could see that....Gotta see what we can do with 3-4-5 trianges.
My research show that the 3-4-5triangle is achieved with the 4-5-6 length pieces
of lego ast it then measure on the 3-4-5 lines at pin centers (su measuing from
end center to end center on a liftarm of 4studs nets a 3stud length.. it
confounded me for a bit until I realized the O.C. detail...
> > > My leg design has lock, but it is using the folding table leg technique you
> > > suggested.
> > Hm.. my legs have no lock...we'll have to see how it does...
> We figure it weighs so much we have to have locks so that it can stand up
> without pressure.
Good point.. I'll have to look at that...
> Thanks for the inspiration Joe...
Thank you guys...
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Joseph Greene wrote:
> > > > Mine is mostly Black and yellow as that is what I have the most of.. alas some
> > > > white has intruded as well...
> > >
> > > In general try to stay away from black, because it is hard to take pictures of,
> > > and see the internal design.
> >
> >
> > I LDraw a lot of it anyway...
>
>
> I don't think Kevin knows how to use LDraw. :)
Heck, I don't even know how to spell LDraw :^)
>
> Kevin, we need to talk about the next 'step' for SSClagorpion...
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > > > In lugnet.technic, Joseph Greene wrote:
> > > I LDraw a lot of it anyway...
> >
> > I don't think Kevin knows how to use LDraw. :)
>
> Heck, I don't even know how to spell LDraw :^)
How about like "L-P-U-B"? :)
CS
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Chio Siong Soh wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > > > In lugnet.technic, Joseph Greene wrote:
> > > > I LDraw a lot of it anyway...
> > >
> > > I don't think Kevin knows how to use LDraw. :)
> >
> > Heck, I don't even know how to spell LDraw :^)
>
>
> How about like "L-P-U-B"? :)
It's a tough one.... let me guess. LPub? I think I've heard of it.
>
> CS
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
<snip>
>
> This morning I came up with the combination of a distance of 1.5 using a technic
> CAM, combined with a 30 degree cutback (back towards the center) using this:
>
> http://www.peeron.com/inv/parts/44374
>
> It looks ugly, but it works quite well and provides very good diameter circle..
> I'll get a picture up soon.
Here is the picture.
http://www.kclague.net/SSCorpion/P6130013.JPG
I got the whole compressor back together and it is mechanically sound.
Whether this provides a superior compressor or not, I've got to try to use the
same geometry to make a pneumatic engine. My friend Kyle at the LEGO
Imagination Center in Minneapolis gave me the idea.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Kevin, it looks like you are making strides to create a sound compressor. This
will be of great importance (of course) as this will be the heart of the beast.
Once this stage of the project is conqured, a major hurdle will have been
obtained. Good work.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> Kevin, it looks like you are making strides to create a sound compressor. This
> will be of great importance (of course) as this will be the heart of the beast.
>
> Once this stage of the project is conqured, a major hurdle will have been
> obtained. Good work.
Thanks Eric,
I have a progress report, boss.... ;^)
I have completed two compressors. The first is basically a two large pump
compressor driven by two RC racer's motors (very powerful). This compressor is
implemented with one large piston and two old-style pnuematics' "pneumatic
distribution bricks". These bricks have a one way valve that makes the piston
behave as a pump.
The second compressor is composed of 12 small pumps, implemented as two radial
compressors, each run by an RC racer motor.
The 12 small pumps to 2 large pump ratio is used to make an apples to apples
comparison of these pumps. Six compressions of a small pump moves the same
volume of air as one compression of a large pump.
Mr. Pneumatics, Dr. C. S. Soh, has always been quite vocal about the
superiority of small pumps vs. large pumps. He did static pressure comparisons
between a small pump and a large pump, each powered by a mini-motor. His test
showed that the small pumps are superior.
For a long time, I've been a large pump fan, because it can move more air.
And of the compressors I made, the large pump versions pushed much more air at
operating pressure of the applications I was powering.
My two compressors were designed to do a fair comparison of capacity (the
amount of air moved at operating pressures). I used my inchworm as the
pneumatic application. It requires a lot of air and has high pressure
requirements.
I've not done any serious measurement yet, but it is very clear to me that Dr.
Soh *is* absolutely correct. When running the large pump using RC racer motors
turning an 8T driving a 40T, and the small pump compressor at the same gear
ratio, (and the same battery packs), the motors turn faster with the small pump
compressor. I didn't use a tachometer to measure RPM, but the motors are quite
loud, and whine at a frequency related to how fast the motor turns. The whining
with small pumps was higher pitch than the large pumps.
I changed the gear ratio to 24:40. The small pump compressor motors ran at a
slower rate (understandable), but had no problem driving the inchworm. The
large pump compressor could not run, because the motors did not have enough
torque.
This tells me that the small pump compressor clearly superior. It is my
belief that the small pump compressor is smaller, because the maximum torque at
any point in a rotation is only the torque needed to compress a small pump. The
six small pumps are distributed across the 360 degrees of one turn. The torque
needed to compress a large pump is much higher, and happens twice per rotation
of the compressor.
One thing to note is that I finally have a compressor that can run the
inchworm faster than I can by pumping by hand.
So, Dr. Soh, you were right all along. Feel free to say "I told you so!"
Kevin
P.S. The downside to this particular small pump design is that it is much larger
than the large pump design. Now it is time to work on a non-radial design that
is smaller. It will take more gears and therefore more loss, but will still be
superior.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
> > Kevin, it looks like you are making strides to create a sound compressor. This
> > will be of great importance (of course) as this will be the heart of the beast.
> >
> > Once this stage of the project is conqured, a major hurdle will have been
> > obtained. Good work.
>
> Thanks Eric,
>
> I have a progress report, boss.... ;^)
Report.
> I have completed two compressors. The first is basically a two large pump
> compressor driven by two RC racer's motors (very powerful). This compressor is
> implemented with one large piston and two old-style pnuematics' "pneumatic
> distribution bricks". These bricks have a one way valve that makes the piston
> behave as a pump.
>
> The second compressor is composed of 12 small pumps, implemented as two radial
> compressors, each run by an RC racer motor.
That is so cool, we should leave the compressor exposed some how so it could be
seen.
*Ahem, carry on.
> The 12 small pumps to 2 large pump ratio is used to make an apples to apples
> comparison of these pumps. Six compressions of a small pump moves the same
> volume of air as one compression of a large pump.
Plus is that sweet radial design x2!
*Ahem, yes.
> Mr. Pneumatics, Dr. C. S. Soh, has always been quite vocal about the
> superiority of small pumps vs. large pumps. He did static pressure comparisons
> between a small pump and a large pump, each powered by a mini-motor. His test
> showed that the small pumps are superior.
Radially. (makes "OK" symbol with hands)
> For a long time, I've been a large pump fan, because it can move more air.
> And of the compressors I made, the large pump versions pushed much more air at
> operating pressure of the applications I was powering.
Right, hence the conumdrum.
> My two compressors were designed to do a fair comparison of capacity (the
> amount of air moved at operating pressures). I used my inchworm as the
> pneumatic application. It requires a lot of air and has high pressure
> requirements.
Plus its super cool!
*Ahem, yes, and?
> I've not done any serious measurement yet, but it is very clear to me that Dr.
> Soh *is* absolutely correct. When running the large pump using RC racer motors
> turning an 8T driving a 40T, and the small pump compressor at the same gear
> ratio, (and the same battery packs), the motors turn faster with the small pump
> compressor. I didn't use a tachometer to measure RPM, but the motors are quite
> loud, and whine at a frequency related to how fast the motor turns. The whining
> with small pumps was higher pitch than the large pumps.
>
> I changed the gear ratio to 24:40. The small pump compressor motors ran at a
> slower rate (understandable), but had no problem driving the inchworm. The
> large pump compressor could not run, because the motors did not have enough
> torque.
>
> This tells me that the small pump compressor clearly superior. It is my
> belief that the small pump compressor is smaller, because the maximum torque at
> any point in a rotation is only the torque needed to compress a small pump. The
> six small pumps are distributed across the 360 degrees of one turn. The torque
> needed to compress a large pump is much higher, and happens twice per rotation
> of the compressor.
>
> One thing to note is that I finally have a compressor that can run the
> inchworm faster than I can by pumping by hand.
>
> So, Dr. Soh, you were right all along. Feel free to say "I told you so!"
Wait, but you did go back to the z8-z40 gear ratio right?
The z24 - z40 config can work, but a direct mate of the gears is, well,
unorthodox, depending. It could be mated one brick level forward with a couple
of z16's for a 1:1 ration before tranfering load to the z24 - z40, indirectly.
I'm just curious.
If the motor can handle it, then that's fine too.
I gotta show you a couple of tricks at BF.
> Kevin
>
> P.S. The downside to this particular small pump design is that it is much larger
> than the large pump design. Now it is time to work on a non-radial design that
> is smaller. It will take more gears and therefore more loss, but will still be
> superior.
Ok, but man I like that radial design.
*Ahem, I mean. Carry on.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> Mr. Pneumatics, Dr. C. S. Soh, has always been quite vocal about the
> superiority of small pumps vs. large pumps. He did static pressure comparisons
> between a small pump and a large pump, each powered by a mini-motor. His test
> showed that the small pumps are superior.
Actually, as I have always emphasied, the large pump is better if operated
furiously by hand.
> I've not done any serious measurement yet, but it is very clear to me that Dr.
> Soh *is* absolutely correct. When running the large pump using RC racer motors
> turning an 8T driving a 40T, and the small pump compressor at the same gear
> ratio, (and the same battery packs), the motors turn faster with the small pump
> compressor. I didn't use a tachometer to measure RPM, but the motors are quite
> loud, and whine at a frequency related to how fast the motor turns. The whining
> with small pumps was higher pitch than the large pumps.
You should get one of the Speed Computer thing instead of relying on your ears
and maybe lose your hearing.
> One thing to note is that I finally have a compressor that can run the
> inchworm faster than I can by pumping by hand.
Hey, what will you be doing with all your large pumps, then?
> So, Dr. Soh, you were right all along. Feel free to say "I told you so!"
Well, I have always believed that the large pump was meant to be manually
operated and the small pump was designed to be motorised...
C S
| | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> ok, so we have about 200 messages in this thread. I'm going to start changing
> the subject to actually include the... subject. But still keep SSClagorpion,
> for those who chose to skip the thread.
Hi Steve,
Were you able to come up with anything in your compressor experiments?
The topic of compressors is an interesting one. As you know there are many
many solutions to this problem.
The most popular is Ralph Hempel's design that you can find on Dr. Soh's
website. It uses small pumps and RIS motor(s?).
There is an on-going discussion/debate about small pumps vs. medium pumps.
One aspect of a functioning compressor is highest achievable pressure. The
pressure depends on the force of compression, and the area of the face of the
compressing piston. Small pumps and the proper downgearing of Mindstorms motors
make for a very good match of the motor's torque and therefore the force needed
to push the piston all the way in on small pumps. This lets small pumps get to
high pressure quickly. The downside is that the small pumps don't move a lot of
air. Any design that uses medium two port pistons, needs a large volume of
compressed air to work with rapidity.
Using modern LEGO hand pumps (less the spring if you like) and mindstorms
motors does not make for a very good compressor. The face of the piston in the
hand pumps is *much* larger than the face of the small pump. The total volume
of air contained within an expanded hand pump is *much* larger than the volume
of a small pump.
I'll have to do some measuring at home, but I'd like to know how many small
pump volumes it takes to make a large pump volume. At that ratio, I'd like to
know the sum of surface area of the faces of the small pump, vs. the surface
area of the large pump. I'd also like to know how many small pump piston faces
it takes to match the surface area of the hand pump piston face.
The surface area and pressure are what define the amount of force needed to
fully compress a pump. The force to compress is provided by a combination of
motor strength (torque) and any gear trains leading to the pump handle.
In a compressor you buy at the store, the pump runs very fast, because of
designs that match the motor torque, gearing, area of pump piston face, and
pressure requirements.
I've tried to make LEGO compressors that run the small pumps very fast. The
small pumps get *very* hot and the pumps function can get permanently damaged.
Small pumps are not very robust for heavy duty operation.
The large pumps expand and contract more slowly than small pumps. Certainly
the circumference of the seals is longer on large pistons than small pistons,
therefore increasing friction, but I don't think that is enough to explain the
difference.
I'd guess that the piston seal technology is different for smalls versus large.
It is my belief that small pumps are not heavy duty enough for making good high
volume, high pressure compressors. It is also my beleif that Mindstorms motors
do not provide enough torque to make a good compressor.
One downside is that building with large pumps takes a lot more structural
volume than small pistons.
Once you've fixed yourself with a given pump choice, the overall output of a
compressor depends souly on the number of pump compressions per minute. This is
constrained by the pressure needed to make a MOC work. The higher the pressure,
the more force needed to compress the pump. The large the force, the more motor
torque.
Using large pumps driven by motors is typically done by converting rotary motion
from the motor, to linear motion (compressing the pump) using either a large
pulley or 40T gears. 40T gears are better, because they provide a slightly
better range of motion than the large pulley.
One rotation of the 40T gear leads to one compression of the pump. The motor
has an easy job when it is expanding the pump. For the compression of the pump,
the maximum force is only needed when the pump is *mostly* compressed.
This means that the maximum torque is only needed for a small portion of the
rotation of the 40T gear. This allows us the ability to add *more* pumps to the
compressor without providing more motor torque, by timing the maximum
compression of each pump so it does not overlap maximum compression of the other
pumps.
For example, we could use two pumps that are 180 degrees out of phase from each
other, three pumps that are 120 degrees out of phase from each other, or four
pumps that are 90 degrees out of phase.
Packing four pumps into a compressor can make for a very large compressor.
To reduce the size of a four pump compressor, I chose to use a large (well
medium, but there is not really a large) dual ported (modern LEGO) piston. Al
large piston has two cavities: one for compression and the other for
contraction. All we need to make each of these cavities usable for as pumps are
a set of check valves. LEGO used to make these "pneumatic distribution bricks
with check valve" that provides exactly what we need.
By hooking the expansion port of a large piston to the center port of the
distribution brick, we make the dual ported piston into a single action pump.
By hooking the contraction port of a large piston to a second distribution
brick, we create a second single action pump using the same physical pneumatic
piston.
Now we have a dual action pump, meaning we get two compressions per single cycle
of compression/expansion of the piston. The two compressions are 180 degrees
out of phase. We effectively get two pumps out of the structural volume of one
piston (plus two 2x4 bricks).
By using a second large dual action pump (i.e. second piston+two distribution
bricks), with compression/expansion of the piston offset by 90 degrees from the
first, we get a total of four compressions with one complete rotation of the 40T
gear.
I've very successfully used two RC racer motors each with their own battery box,
turning 8T gears driving the 40T gears, driving two dual acting pumps, to make a
powerful compressor. My pneumatic inchworm requires a lot of pressure *and*
volume to function. Using the above compressor (with only three of the four
distribution bricks (more on the way)), inchworm ran almost as fast as I can do
running hand pumps by hand. This is the first time I've ever had a compressor
that came close to competing with my muscles.
I've got three more distribution bricks coming from bricklink..... Once I get
those, I'm going to try three dual acting pumps offset by 120 degrees (or 60
degrees between any two compressions), and see if the RC racer motors are up to
the task.
I sure wish LEGO still made those distribution bricks. I voted for them in
Jake's survey.
I'll let you know how things go with the three dual-pump compressor once I get
the needed parts.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> Were you able to come up with anything in your compressor experiments?
>
> The topic of compressors is an interesting one. As you know there are many
> many solutions to this problem.
First of all, no. I have nothing interesting in the world of compressors. I
got sidetracked building an all mechanical walker that has no gravity well. I
think it's a cool idea, which I may revisit later, but I think this design
requires more accurate tuning than is possible with LEGO. I'll try to get some
pictures posted.
Also, my RC Buggy motors are currently in a robot that needs to be drawn up in
ldraw before I can take it apart.
Anyway...
I have a couple basic questions.
Ignoring time, can both pumps (small & medium) reach the same max pressure? I
don't think the maximum pressure is really relevant, but the important thing is
trying to get the system to a specific pressure in the minimum time.
How does the "time-to-maximum pressure" relate to the "volume pumped"? I would
think they are directly related. In order to get a system to it's maximum
pressure, you must add a specific volume of air. Right?
So, to create a reasonable test, you could set-up a system using several air
tanks, a piston, and a couple rubber bands, like Ralph had for his switch (I
can't find the link)
Then, let all the air out of the system, and see how long it takes each one to
get enough pressure to expand the piston.
I'll have to try that
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Were you able to come up with anything in your compressor experiments?
> >
> > The topic of compressors is an interesting one. As you know there are many
> > many solutions to this problem.
>
> First of all, no. I have nothing interesting in the world of compressors. I
> got sidetracked building an all mechanical walker that has no gravity well. I
> think it's a cool idea, which I may revisit later, but I think this design
> requires more accurate tuning than is possible with LEGO. I'll try to get some
> pictures posted.
You should go study Dr. C. S. Soh's website for a great foundation on
compressors.
>
> Also, my RC Buggy motors are currently in a robot that needs to be drawn up in
> ldraw before I can take it apart.
>
> Anyway...
>
> I have a couple basic questions.
>
> Ignoring time, can both pumps (small & medium) reach the same max pressure? I
> don't think the maximum pressure is really relevant, but the important thing is
> trying to get the system to a specific pressure in the minimum time.
I've not studied that. I think that the max pressure that LEGO can handle is
constrained by hoses staying on fittings, not what the pumps can deliver.
>
>
> How does the "time-to-maximum pressure" relate to the "volume pumped"? I would
> think they are directly related. In order to get a system to it's maximum
> pressure, you must add a specific volume of air. Right?
But the force on the pump's piston face fighting the motor plays a pivotal role
also. The force is calculated by the area of the piston face times the
pressure. If you have enough small pumps to provide the same surface area as a
large pump, then the push back should be equal. If you can get to max pressure
with smaller piston face, there is less pushback (why small pumps are considered
best by some).
The force reduces volume pumped per unit time.....
>
>
> So, to create a reasonable test, you could set-up a system using several air
> tanks, a piston, and a couple rubber bands, like Ralph had for his switch (I
> can't find the link)
>
> Then, let all the air out of the system, and see how long it takes each one to
> get enough pressure to expand the piston.
>
> I'll have to try that
That is fine for a static pressure test.
After that try another test: build a three piston pneumatic motor and see how
many RPMs you get.
>
> Steve
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
So, we're talk'n about compressors.
This is where I'm thinking we should layout some questions so those who are
following along (like me, until I get my hands on the eleptapod).
Heh I just made that word up!
Steve, Kevin, if you could, please, and if you don't mind, please play along.
Ok, Compressors for Leg Movement:
Lots of Legs, How many Compressors.
One right?
K, Motor control for said compressor(s) to RCX, or Battery Box with possible
motorized polarity switch for on/off position.
Right?
Pneumatic Switch Control to RCX.
Spybot motor output to sensor to RCX to directional control of the Legs?
Right?
Or would you like the Spybot to just talk to the RCX(s).
I know we have to point the RCX towards the Spybot.
(Spybot in the head, two RCX behind pointing fwd, twds, back of Spybot.)
Right?
Kevin, what can I help you discuss in terms of construction.
Steve, what can we do to help prepare Kevin to install Compressor at the best
place in the body as well as placement theory of the other controls.
Kevin, what does the best motorized Switch Control look like for you.
Or do we need that?
Or will you rig the gate logic in the pneumatics to move sequentially?
That is to say will each leg be controlled independantly or will you link them
so they move together in the air circut per given leg set.
Head hurts yet?
Pardon the questions, I just like to clarify every once in a while to cover up
my other simultaneous projects.
heh heh.
e
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
>
> So, we're talk'n about compressors.
>
> This is where I'm thinking we should layout some questions so those who are
> following along (like me, until I get my hands on the eleptapod).
>
> Heh I just made that word up!
I feel better knowing that.
>
> Steve, Kevin, if you could, please, and if you don't mind, please play along.
Sure. I like games.
>
> Ok, Compressors for Leg Movement:
>
> Lots of Legs, How many Compressors.
> One right?
Hopefully one big compressor composed of three pistons each acting as a double
acting pump, driven by RC racer motors. Each RC racer motor is controlled by a
battery pack.
>
> K, Motor control for said compressor(s) to RCX, or Battery Box with possible
> motorized polarity switch for on/off position.
> Right?
The compressor will have a high pressure limit switch composed of large piston,
rubber band and electrical polarity switch.
>
> Pneumatic Switch Control to RCX.
> Spybot motor output to sensor to RCX to directional control of the Legs?
> Right?
RCX output to Mindstorms motor to control 8 pneumatic switches to control
forward vs. backwards.
Second RCX output to Mindstorms motor to control 8 more pneumatic switches to
control turn/not turn.
The spybot motors might be used to animate the claws.
>
> Or would you like the Spybot to just talk to the RCX(s).
> I know we have to point the RCX towards the Spybot.
> (Spybot in the head, two RCX behind pointing fwd, twds, back of Spybot.)
> Right?
That is my understanding.
>
> Kevin, what can I help you discuss in terms of construction.
I just need time for now.
> Steve, what can we do to help prepare Kevin to install Compressor at the best
> place in the body as well as placement theory of the other controls.
The compressor is going to be at the widest part of the body probably where the
8 hips come together. This will put the single heaviest component near the
centroid of the footprint.
In front of that are the two RCX's and in front of those is the spybot.
>
> Kevin, what does the best motorized Switch Control look like for you.
> Or do we need that?
> Or will you rig the gate logic in the pneumatics to move sequentially?
> That is to say will each leg be controlled independantly or will you link them
> so they move together in the air circut per given leg set.
I have not figured out the motorized pneumatic multiplexor design yet, nor the
motorized switches that stop walking. I used to use differentials off of the
compressor motors to flip pneumatic switches, but that won't work in this case.
The vertical pistons are hooked together in two groups of four.
The horisontal pistons are all hooked together.
The forward/reverse mux reverses the inputs to all the horizontal pistons, and
reverses the outputs of those pistons.
The turn/not turn reverses inputs to half the hip pistons and reverses the
outputs of those pistons.
>
> Head hurts yet?
Nope. Just waiting for a few more parts to finish the compressor.
>
> Pardon the questions, I just like to clarify every once in a while to cover up
> my other simultaneous projects.
No problem.
>
> heh heh.
>
> e
K
| | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> The large pumps expand and contract more slowly than small pumps.
> Certainly the circumference of the seals is longer on large pistons than
> small pistons, therefore increasing friction, but I don't think that is
> enough to explain the difference.
Airflow is what causes this. The two pumps both hook up to the same size hoses
with the same size nipples, but an identical length of stroke on the larger pump
is pushing quite a bit more air than the small pump. There's a limit to how
fast air will flow through that nipple, so the larger the pump's bore, the
slower it will close when the same force is applied to the shaft.
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, David Laswell wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Steve Hassenplug wrote:
> > The large pumps expand and contract more slowly than small pumps.
> > Certainly the circumference of the seals is longer on large pistons than
> > small pistons, therefore increasing friction, but I don't think that is
> > enough to explain the difference.
>
> Airflow is what causes this. The two pumps both hook up to the same size hoses
> with the same size nipples, but an identical length of stroke on the larger pump
> is pushing quite a bit more air than the small pump. There's a limit to how
> fast air will flow through that nipple, so the larger the pump's bore, the
> slower it will close when the same force is applied to the shaft.
That is absolutely right. Nice one David.
It makes me think we could have high preformance pistons by playing with the
variables at both ends. In practice, a boring out of the nipple hole diameter is
like what boosted the horse power in my Corvette motor by boring out the block
.030 over.
e
(though I would never mod Lego. Unless it was Hi-Technic surplus)
;)
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Eric Sophie wrote:
> It makes me think we could have high preformance pistons by playing with the
> variables at both ends. In practice, a boring out of the nipple hole
> diameter is like what boosted the horse power in my Corvette motor by boring
> out the block .030 over.
I think Kevin has the right idea with racking up a whole bunch of pumps on the
same motor. If everything pumps into one air tank anyways, you're going to be
restricted to what can go through a single nipple, but there's no reason why you
can't have a constant airflow going into the tank. If vertical space becomes a
concern, you can always run them off a drive-shaft or two so you can lay all of
the pump cylinders flat. Gear allignment would be very critical if you go this
route, since each cylinder would have to be geared separately, but it would mean
that you could place the cylinders anywhere you've got extra space, and having
independant timing on each cylinder means you wouldn't need to completely
redesign the pump structure if you need to add another pump.
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, David Laswell wrote:
> I think Kevin has the right idea with racking up a whole bunch of pumps on the
> same motor. If everything pumps into one air tank anyways, you're going to be
> restricted to what can go through a single nipple, but there's no reason why you
> can't have a constant airflow going into the tank.
One thing I noticed is that the example pump someone showed earlier has both
output lines joined into one T connector, to make a single output line. If
airflow is a problem, then wouldn't it be better to keep them separate, with two
or more lines going to the system. You would join them together with a cross
feed lines to keep the pressure even. You would also put the air tank on the
side, instead of flowing through. If there's more pressure being produced than
the system needs at the moment, air goes in the tank, if there's less pressure,
air comes out of the tank.
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Benton Jackson wrote:
> In lugnet.technic, David Laswell wrote:
>
> > I think Kevin has the right idea with racking up a whole bunch of pumps on the
> > same motor. If everything pumps into one air tank anyways, you're going to be
> > restricted to what can go through a single nipple, but there's no reason why you
> > can't have a constant airflow going into the tank.
>
> One thing I noticed is that the example pump someone showed earlier has both
> output lines joined into one T connector, to make a single output line. If
> airflow is a problem, then wouldn't it be better to keep them separate, with two
> or more lines going to the system. You would join them together with a cross
> feed lines to keep the pressure even. You would also put the air tank on the
> side, instead of flowing through. If there's more pressure being produced than
> the system needs at the moment, air goes in the tank, if there's less pressure,
> air comes out of the tank.
I was assuming that the model would use whatever air pressure it was given,
unless the state machine was shut off. Given the volume of air that it will
take to make the circuit progress, an air tank won't hold enough air to help.
Based on this post:
http://news.lugnet.com/technic/?n=11440
I didn't plan on using any tanks.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> I was assuming that the model would use whatever air pressure it was given,
> unless the state machine was shut off. Given the volume of air that it will
> take to make the circuit progress, an air tank won't hold enough air to help.
Yeah, air tanks on a compressor are really only useful when you're using short
bursts of more air than the compressor can keep up with (so you need a reservoir
to draw from to keep pressure up through each burst) or you're using way less
than it's capable of pumping (so you want to give it a chance to rest until the
pressure drops below a certain level). If you're using a constant draw, and you
can tweak the compressor capacity to match what's needed, there's really no need
for a reservoir tank. A cut-off switch is still a good idea, especially if
you're still planning to have it stop when it runs out of table.
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Benton Jackson wrote:
> > If there's more pressure being produced than
> > the system needs at the moment, air goes in the tank, if there's less pressure,
> > air comes out of the tank.
>
> I was assuming that the model would use whatever air pressure it was given,
> unless the state machine was shut off. Given the volume of air that it will
> take to make the circuit progress, an air tank won't hold enough air to help.
Here's an important question. What will be the limiting factor in how fast this
beast can move? Is it:
A) Travel time for the pneumatic cylinders
or
B) Volume of air available?
I'm under the impression it will be limited by the volume of air available.
An important thing to note is that the number of pistons moving is not always
the same, so the load on the compressor is not constant.
A quick look at Kevin's diagram for quad-242 shows (if I read it correctly) ten
states. The transitions between those states include two times where four
pistons move, four times where two pistons move, and four times where one piston
moves. I think. I'm pretty sure that doesn't include timing pistons.
That means the system expands (or contracts) twenty pistons, in ten steps, or an
average of two pistons, all the time.
So, I THINK using air tanks, the compressor only has to provide enough air for
two pistons for the quad 242 to move at full speed. But, without air tanks, the
compressor has to suppily four pistons, at peek times.
Of course SSClagorpion has twice the number of legs, but all the above logic
should be correct.
Is that right?
I'd guess the test that was posted was using a system that had a constant draw
(number of pistons moving is always the same), in which case, the air tanks
would not help it move faster, because there is no time when the compressor is
suppilying more air than the system will use.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Benton Jackson wrote:
> > > If there's more pressure being produced than
> > > the system needs at the moment, air goes in the tank, if there's less pressure,
> > > air comes out of the tank.
> >
> > I was assuming that the model would use whatever air pressure it was given,
> > unless the state machine was shut off. Given the volume of air that it will
> > take to make the circuit progress, an air tank won't hold enough air to help.
>
>
>
> Here's an important question. What will be the limiting factor in how fast this
> beast can move? Is it:
> A) Travel time for the pneumatic cylinders
> or
> B) Volume of air available?
>
> I'm under the impression it will be limited by the volume of air available.
>
> An important thing to note is that the number of pistons moving is not always
> the same, so the load on the compressor is not constant.
>
> A quick look at Kevin's diagram for quad-242 shows (if I read it correctly) ten
> states. The transitions between those states include two times where four
> pistons move, four times where two pistons move, and four times where one piston
> moves. I think. I'm pretty sure that doesn't include timing pistons.
>
> That means the system expands (or contracts) twenty pistons, in ten steps, or an
> average of two pistons, all the time.
>
> So, I THINK using air tanks, the compressor only has to provide enough air for
> two pistons for the quad 242 to move at full speed. But, without air tanks, the
> compressor has to suppily four pistons, at peek times.
>
> Of course SSClagorpion has twice the number of legs, but all the above logic
> should be correct.
>
> Is that right?
>
> I'd guess the test that was posted was using a system that had a constant draw
> (number of pistons moving is always the same), in which case, the air tanks
> would not help it move faster, because there is no time when the compressor is
> suppilying more air than the system will use.
>
> Steve
Steve,
A very interesting set of questions and logic. I don't know the answer, but
can add insights that are related.
As the available volume/pressure increases, the pistons expand and contract
faster. I don't know if there is a linear relationship. If we double the
pressure, does the thing expand/contract in half the time? I don't know. I can
easily set up a test though. If I use one pump, then two pumps, then three
pumps, I can measure the pressure (using my virgin pressure sensor), and the
rate of transitions of a dual piston engine. I doubt that it is linear across
the entire pressure/volume range. I also doubt though that there is some kind
of knee in the curve, where no matter how much you increase the pressure, the
piston rate never increases.
After I get my last brickink order with three more check valve bricks, I can
get us from one to 6 pumps.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > Here's an important question. What will be the limiting factor in how fast this
> > beast can move? Is it:
> > A) Travel time for the pneumatic cylinders
> > or
> > B) Volume of air available?
> >
> > I'm under the impression it will be limited by the volume of air available.
> >
> > An important thing to note is that the number of pistons moving is not always
> > the same, so the load on the compressor is not constant.
> >
> > A quick look at Kevin's diagram for quad-242 shows (if I read it correctly) ten
> > states. The transitions between those states include two times where four
> > pistons move, four times where two pistons move, and four times where one piston
> > moves. I think. I'm pretty sure that doesn't include timing pistons.
> >
> > That means the system expands (or contracts) twenty pistons, in ten steps, or an
> > average of two pistons, all the time.
> >
> > So, I THINK using air tanks, the compressor only has to provide enough air for
> > two pistons for the quad 242 to move at full speed. But, without air tanks, the
> > compressor has to suppily four pistons, at peek times.
> >
> > Of course SSClagorpion has twice the number of legs, but all the above logic
> > should be correct.
> >
> > Is that right?
> >
> > I'd guess the test that was posted was using a system that had a constant draw
> > (number of pistons moving is always the same), in which case, the air tanks
> > would not help it move faster, because there is no time when the compressor is
> > suppilying more air than the system will use.
> >
> > Steve
>
> Steve,
> A very interesting set of questions and logic. I don't know the answer, but
> can add insights that are related.
>
> As the available volume/pressure increases, the pistons expand and contract
> faster. I don't know if there is a linear relationship. If we double the
> pressure, does the thing expand/contract in half the time? I don't know. I can
> easily set up a test though. If I use one pump, then two pumps, then three
> pumps, I can measure the pressure (using my virgin pressure sensor), and the
> rate of transitions of a dual piston engine. I doubt that it is linear across
> the entire pressure/volume range. I also doubt though that there is some kind
> of knee in the curve, where no matter how much you increase the pressure, the
> piston rate never increases.
>
> After I get my last brickink order with three more check valve bricks, I can
> get us from one to 6 pumps.
>
> Kevin
The limiting factor with the speed of the model is composed of two things:
1. The total volume of air between the valve that is switched and the cylinders
that were previously supplied before the valve was switched.
2. The rate of supply of air from the compressors.
You can minimise 1. by using flex tubing for the straight tubes and pneumatic
tubing only for the curved tubes and in places where flexibility is necessary.
This will reduce the balloon effect and increase efficiency. Test this with a
5m long pneumatic tube between the cylinder and compressor - see how much longer
it takes to get up to pressure than with a 5cm tube!
2 is a factor of compressor power. You need at least two large pump cylinder
cycles per cylinder to be moved - three under greater load. If you have 6 pump
cylinders and three cylinders on each leg, that's a 2:1 ratio.
Also, if you use air tanks, design against the tanks leaking. Tubes between
logic stages should be short and/or use as much flex tubing as possible. Every
valve movement will use air that has to be replaced, by pressurising
intermediate tubes in the logic.
This is why I use a car tyre air compressor with pressure setting. It works
hard to maintain the pressure you set (I use 25-30psi) and leaks any excess to
the atmosphere. That way it keeps the pressure as high as it should be and
protects the Lego parts against overpressure. I see no shame in using a
non-Lego method to supply more air power (or electric power for trains) if the
official Lego method is inadequate for bigger models.
I think you need an overpressure release valve. Use two small cylinders pushing
a valve switch against elastic band tension. When the pressure in the cylinders
is greter than the elastic tension the valve will release some air. As the air
is released, the cylinders will leak, so they will be pulled back by the
elastic, closing the valve. this system allows the compressor to run constantly
or be more powerful, such that it can restore pressure quicker. Have a powerful
compressor with an overpressure release valve, rather than a wimpy compressor
that will struggle with the load.
I said a while back that if you had sets of 4 large pump cylinders driven from
pairs of RC car motors, you might need 2 or 3 sets to compress enough air. I
think that because my robot uses 6 pump cylinders (3 in each hand) and goes at
an adequate speed. The robot uses only 8 cylinders and 9 switches, where your
scorpion is on course for 50 cylinders and 100 switches. 6 large pump cylinders
is simply not enough!
Mark
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> You can minimise 1. by using flex tubing for the straight tubes and pneumatic
> tubing only for the curved tubes and in places where flexibility is
> necessary. This will reduce the balloon effect and increase efficiency.
> Test this with a 5m long pneumatic tube between the cylinder and compressor -
> see how much longer it takes to get up to pressure than with a 5cm tube!
Lessee, 5m tube vs. 5cm (or .05m) tube...I'd guess something approaching 100x as
long? :) I'm guessing you meant to type something a little different there...
Anyways, by my eye, the flex-system tube OD is roughly the same as the OD of the
pneumatic nipples. I'd be worried about how painful (both physically and
mentally) it might be to attach all of those hoses and how easily they might
split under pressure. I just tried to attach one and I couldn't even get it
started, so I'm very curious how you go about doing it. Do you use a short stub
of pneumatic tubing as a sleeve coupler, or have you actually managed to cram
one of those things onto a pneumatic nipple?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, David Laswell wrote:
> In lugnet.technic, Mark Bellis wrote:
> > You can minimise 1. by using flex tubing for the straight tubes and pneumatic
> > tubing only for the curved tubes and in places where flexibility is
> > necessary. This will reduce the balloon effect and increase efficiency.
> > Test this with a 5m long pneumatic tube between the cylinder and compressor -
> > see how much longer it takes to get up to pressure than with a 5cm tube!
>
> Lessee, 5m tube vs. 5cm (or .05m) tube...I'd guess something approaching 100x as
> long? :) I'm guessing you meant to type something a little different there...
>
> Anyways, by my eye, the flex-system tube OD is roughly the same as the OD of the
> pneumatic nipples. I'd be worried about how painful (both physically and
> mentally) it might be to attach all of those hoses and how easily they might
> split under pressure. I just tried to attach one and I couldn't even get it
> started, so I'm very curious how you go about doing it. Do you use a short stub
> of pneumatic tubing as a sleeve coupler, or have you actually managed to cram
> one of those things onto a pneumatic nipple?
Yes, the 100x length difference will give a significant balloon effect. I
suppose realistically 40cm to 5cm would be a fairer comparison. Set 8868 came
with a 5m bundle of pneumatic tube.
The use of flex tubing in sets began with sets 8837 excavator and 8868 crane
truck: http://www.bricklink.com/catalogItemPic.asp?S=8837-1
You make pneumatic tubes of length 3-8cm, depending how much flexibility you
need at each end, then use the 3cm tube to connect a cylinder nipple to a flex
tube. Push the pneumatic hose onto the flex tube by about 8mm. Then you can
use clip plates to hold the flex tubes - much tidier!
Mark
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> This is why I use a car tyre air compressor with pressure setting. It works
> hard to maintain the pressure you set (I use 25-30psi) and leaks any excess to
> the atmosphere. That way it keeps the pressure as high as it should be and
> protects the Lego parts against overpressure. I see no shame in using a
> non-Lego method to supply more air power (or electric power for trains) if the
> official Lego method is inadequate for bigger models.
>
> I think you need an overpressure release valve. Use two small cylinders pushing
> a valve switch against elastic band tension. When the pressure in the cylinders
> is greter than the elastic tension the valve will release some air.
This type of valve will be used to turn the power on/off (via polarity switch)
for the compressor.
Instead of needing an overpressure valve, the compressor will be turned off,
saving batteries.
I think we all agree, sometimes you really need to use non-LEGO parts, but Kevin
is interested in trying as hard as possible to avoid that, if possible.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> >
> > So, I THINK using air tanks, the compressor only has to provide enough air for
> > two pistons for the quad 242 to move at full speed. But, without air tanks, the
> > compressor has to suppily four pistons, at peek times.
>
> A very interesting set of questions and logic. I don't know the answer, but
> can add insights that are related.
>
> As the available volume/pressure increases, the pistons expand and contract
> faster. I don't know if there is a linear relationship. If we double the
> pressure, does the thing expand/contract in half the time? I don't know. I can
> easily set up a test though. If I use one pump, then two pumps, then three
> pumps, I can measure the pressure (using my virgin pressure sensor), and the
> rate of transitions of a dual piston engine. I doubt that it is linear across
> the entire pressure/volume range. I also doubt though that there is some kind
> of knee in the curve, where no matter how much you increase the pressure, the
> piston rate never increases.
>
> After I get my last brickink order with three more check valve bricks, I can
> get us from one to 6 pumps.
I have another idea for an interesting test using air tanks. Set up a pneumatic
engine and add an extra piston to ONE side. (so there are three total pistons,
and two move at the same time) See show the speed compairs with vs without
airtanks.
This will start to simulate how SSClagorpion works.
Next, I want to make up a work schedule, to see if we can complete this thing
before Brickfest.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
>
> Next, I want to make up a work schedule, to see if we can complete this thing
> before Brickfest.
You know what? I was looking at the numbers, and this is not going to happen
before Brickfest DC '04. Maybe if we all lived in the same town, but
considering shipping and extra problem solving time in the schedule, it's just
not going to happen.
With a week for shipping (each time) we lose about a month, because none of us
can work on it. That gives us each about two weeks to work with it.
Personally, I don't need a lot of time, but I don't see Eric getting all his
work done in two weeks.
And, Kevin, I think the schedule would work out better if you HAD been laid off
your job.
I'm sure it would be possible to throw something together and make it work, I
don't think we'd be as proud of what we did.
While there's no way I'm giving up on this project, this pneumatic, robotic, and
artistic creature will not be making it's debue this year at Brickfest.
:(
So, I think we need to re-schedule it for the next Brickfest DC.
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Steve Hassenplug wrote:
>
> >
> > Next, I want to make up a work schedule, to see if we can complete this thing
> > before Brickfest.
>
> You know what? I was looking at the numbers, and this is not going to happen
> before Brickfest DC '04. Maybe if we all lived in the same town, but
> considering shipping and extra problem solving time in the schedule, it's just
> not going to happen.
>
> With a week for shipping (each time) we lose about a month, because none of us
> can work on it. That gives us each about two weeks to work with it.
>
> Personally, I don't need a lot of time, but I don't see Eric getting all his
> work done in two weeks.
>
> And, Kevin, I think the schedule would work out better if you HAD been laid off
> your job.
That may be, but on Maslow's hierarchy of need, food, clothing and shelter come
before LEGO.
>
> I'm sure it would be possible to throw something together and make it work, I
> don't think we'd be as proud of what we did.
>
> While there's no way I'm giving up on this project, this pneumatic, robotic, and
> artistic creature will not be making it's debue this year at Brickfest.
>
> :(
When I started this little project with Eric, we had no schedule. I know it is
frustracting, but thatnks for the understanding. First and foremost LEGO is
about fun and relaxtion (for me), so I must work it at a pace that I enjoy.
>
> So, I think we need to re-schedule it for the next Brickfest DC.
>
> Steve
Or earlier.... but I will get my part done.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> That may be, but on Maslow's hierarchy of need, food, clothing and shelter come
> before LEGO.
Boy, I thought Maslow was only used in those US Navy leadership training school
that bore people to death. I remember doing an oral presentation on Maslow.
-Orion
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Goodness, I hate to bring up an old thread. In fact I think this one is over a
year old! No matter, curiousity is burning a hole in my cranium, and that’s not
something you want happening! So, has this project halted and/or died, or are we
just not hearing updates? It seemed like a fantastic idea...
Sorry for the dead-thread-revival...
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Devin Michel wrote:
| |
Goodness, I hate to bring up an old thread. In fact I think this one is over
a year old! No matter, curiousity is burning a hole in my cranium, and that’s
not something you want happening! So, has this project halted and/or died, or
are we just not hearing updates? It seemed like a fantastic idea...
Sorry for the dead-thread-revival...
|
I am the one holding up sclagorpion.... My life has finally settled down where
I can have focused LEGO time again. I have been focusing on LPub and LSynth
over in CAD.
I have stareted to get a few more models ready for Brickfest, none of which are
sclagorpion.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
"Kevin L. Clague" <kevin_clague@yahoo.com> wrote in message
news:IIr3G0.1J4H@lugnet.com...
> In lugnet.technic, Devin Michel wrote:
> > Goodness, I hate to bring up an old thread. In fact I think this one is
> > over
> > a year old! No matter, curiousity is burning a hole in my cranium, and
> > that's
> > not something you want happening! So, has this project halted and/or
> > died, or
> > are we just not hearing updates? It seemed like a fantastic idea...
> >
> > Sorry for the dead-thread-revival...
>
> I am the one holding up sclagorpion.... My life has finally settled down
> where
> I can have focused LEGO time again. I have been focusing on LPub and
> LSynth
> over in CAD.
>
> I have stareted to get a few more models ready for Brickfest, none of
> which are
> sclagorpion.
>
> Kevin
Slacker... :P
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Rob Hendrix wrote:
>
> "Kevin L. Clague" <kevin_clague@yahoo.com> wrote in message
> news:IIr3G0.1J4H@lugnet.com...
> > In lugnet.technic, Devin Michel wrote:
> > > Goodness, I hate to bring up an old thread. In fact I think this one is
> > > over
> > > a year old! No matter, curiousity is burning a hole in my cranium, and
> > > that's
> > > not something you want happening! So, has this project halted and/or
> > > died, or
> > > are we just not hearing updates? It seemed like a fantastic idea...
> > >
> > > Sorry for the dead-thread-revival...
> >
> > I am the one holding up sclagorpion.... My life has finally settled down
> > where
> > I can have focused LEGO time again. I have been focusing on LPub and
> > LSynth
> > over in CAD.
> >
> > I have stareted to get a few more models ready for Brickfest, none of
> > which are
> > sclagorpion.
> >
> > Kevin
>
> Slacker... :P
Well Rob, I took your oft repeated advice and did some building..... I
recreated Robo-hominid, and prototyped a new AT-ST. THe legs on AT-ST are my
best yet. I tried to eliminate having to toss the RCX side to side, but it
didn't work. Time to go back to using the RCX as the weight in the weight shift
process. Man those minifig drivers are going to puke!
On Friday I go to a library in a neighboring town for show and tell.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
> Well Rob, I took your oft repeated advice and did some building..... I
> recreated Robo-hominid, and prototyped a new AT-ST. THe legs on AT-ST are
> my
> best yet. I tried to eliminate having to toss the RCX side to side, but
> it
> didn't work. Time to go back to using the RCX as the weight in the weight
> shift
> process. Man those minifig drivers are going to puke!
>
> On Friday I go to a library in a neighboring town for show and tell.
>
> Kevin
In the immortal words of ++lar, "That's a good start." ;)
Actually, AT-ST's are one of my personal favorites. Can't wait to see your
version. too bad about the RCX shifting, though...
Rob
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
On Mon, June 27, 2005 11:07 am, Kevin L. Clague said:
> In lugnet.technic, Devin Michel wrote:
> > Goodness, I hate to bring up an old thread. In fact I think this one is over
> > a year old! No matter, curiousity is burning a hole in my cranium, and that's
> > not something you want happening! So, has this project halted and/or died, or
> > are we just not hearing updates? It seemed like a fantastic idea...
> >
> > Sorry for the dead-thread-revival...
>
> I am the one holding up sclagorpion.... My life has finally settled down where
> I can have focused LEGO time again. I have been focusing on LPub and LSynth
> over in CAD.
>
> I have stareted to get a few more models ready for Brickfest, none of which are
> sclagorpion.
Currently, I have a list of about 20 things to bring to BrickFest. None of which
are SSClagorpion...
But I'm glad to hear that you're bringing a (some) GBC module(s).
Steve
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Devin Michel wrote:
| |
Goodness, I hate to bring up an old thread. In fact I think this one is over
a year old! No matter, curiousity is burning a hole in my cranium, and
that’s not something you want happening! So, has this project halted and/or
died, or are we just not hearing updates? It seemed like a fantastic idea...
Sorry for the dead-thread-revival...
|
I am the one holding up sclagorpion.... My life has finally settled down
where I can have focused LEGO time again. I have been focusing on LPub and
LSynth over in CAD.
I have stareted to get a few more models ready for Brickfest, none of which
are sclagorpion.
Kevin
|
Your acheivements already speak volumes for you. Take your time. ;-D
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Devin Michel wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
In lugnet.technic, Devin Michel wrote:
| |
Goodness, I hate to bring up an old thread. In fact I think this one is
over a year old! No matter, curiousity is burning a hole in my cranium, and
that’s not something you want happening! So, has this project halted and/or
died, or are we just not hearing updates? It seemed like a fantastic
idea...
Sorry for the dead-thread-revival...
|
I am the one holding up sclagorpion.... My life has finally settled down
where I can have focused LEGO time again. I have been focusing on LPub and
LSynth over in CAD.
I have stareted to get a few more models ready for Brickfest, none of which
are sclagorpion.
Kevin
|
Your acheivements already speak volumes for you. Take your time. ;-D
|
Thanks Devin. I appreciate that very much.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> Here's an important question. What will be the limiting factor in how fast
> this beast can move? Is it:
> A) Travel time for the pneumatic cylinders
> or
> B) Volume of air available?
Neither. It's C) The sexy lady SSClagorpion walking the other direction that
catches his eye.
| | | | | | | | | | | | | | | | | |
Last night I had this freakish dream of a giant LEGO scorpion crawling around
(and very quickly too) on the floor. Kevin was standing nearby and commenting on
its performance. There was someone else there too, I think it was Eric. The
scorpion was going faster and faster and getting closer to me.
I can't remember much detail, but I think it was blue, white, and orange. It
looked like something from the designer sets that had come to life.
Thanks guys, you're giving me nightmares!
;-)
-TJ
| | | | | | | | | | | | | | | | |
In lugnet.technic, Thomas Avery wrote:
> Last night I had this freakish dream of a giant LEGO scorpion crawling around
> (and very quickly too) on the floor. Kevin was standing nearby and commenting on
> its performance. There was someone else there too, I think it was Eric. The
> scorpion was going faster and faster and getting closer to me.
>
> I can't remember much detail, but I think it was blue, white, and orange. It
> looked like something from the designer sets that had come to life.
>
> Thanks guys, you're giving me nightmares!
Did you happen to get a look at the compressor? We just need to know what size
pumps it had.
:)
Steve
| | | | | | | | | | | | | | | | |
In lugnet.technic, Steve Hassenplug wrote:
> In lugnet.technic, Thomas Avery wrote:
> > Last night I had this freakish dream of a giant LEGO scorpion crawling around
> > (and very quickly too) on the floor. Kevin was standing nearby and commenting on
> > its performance. There was someone else there too, I think it was Eric. The
> > scorpion was going faster and faster and getting closer to me.
> >
> > I can't remember much detail, but I think it was blue, white, and orange. It
> > looked like something from the designer sets that had come to life.
> >
> > Thanks guys, you're giving me nightmares!
>
>
> Did you happen to get a look at the compressor? We just need to know what size
> pumps it had.
>
> :)
:)
TJ, if you remember, just tell Steve privately. For me LEGO is about learning
and inventing, so I just want to wait for my brickshelf parts to arrive and try
out that 12 small pump radial compressor design.
:)
Kevin
| | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > Did you happen to get a look at the compressor? We just need to know what
> > size pumps it had.
>
> TJ, if you remember, just tell Steve privately. For me LEGO is about
> learning and inventing, so I just want to wait for my brickshelf parts to
> arrive and try out that 12 small pump radial compressor design.
Dang, I just remembered. It had two 6-pump radial compressors. The "pumps" were
the large kind.
I think it was all hooked up to a car battery.
:-)
-TJ
| | | | | | |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
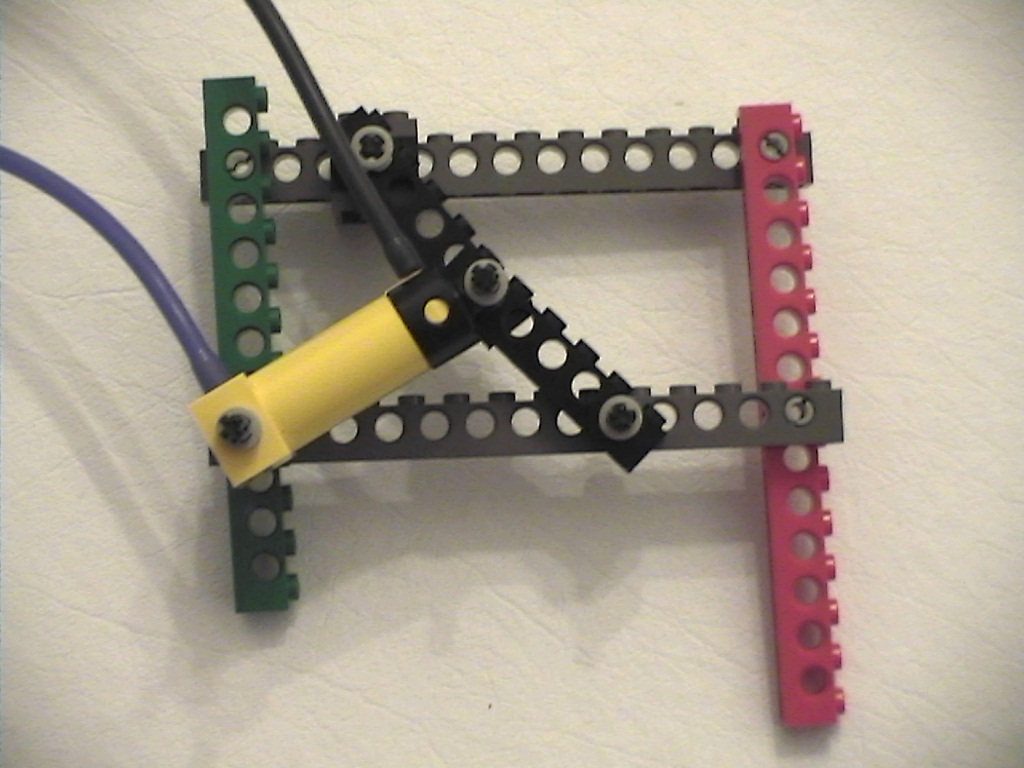{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}