 | | | | | | |
| |

|
After a few long weeks of tinkering, I think Ive settled on a final design that
I would like to display at the Toronto
Hobby show.
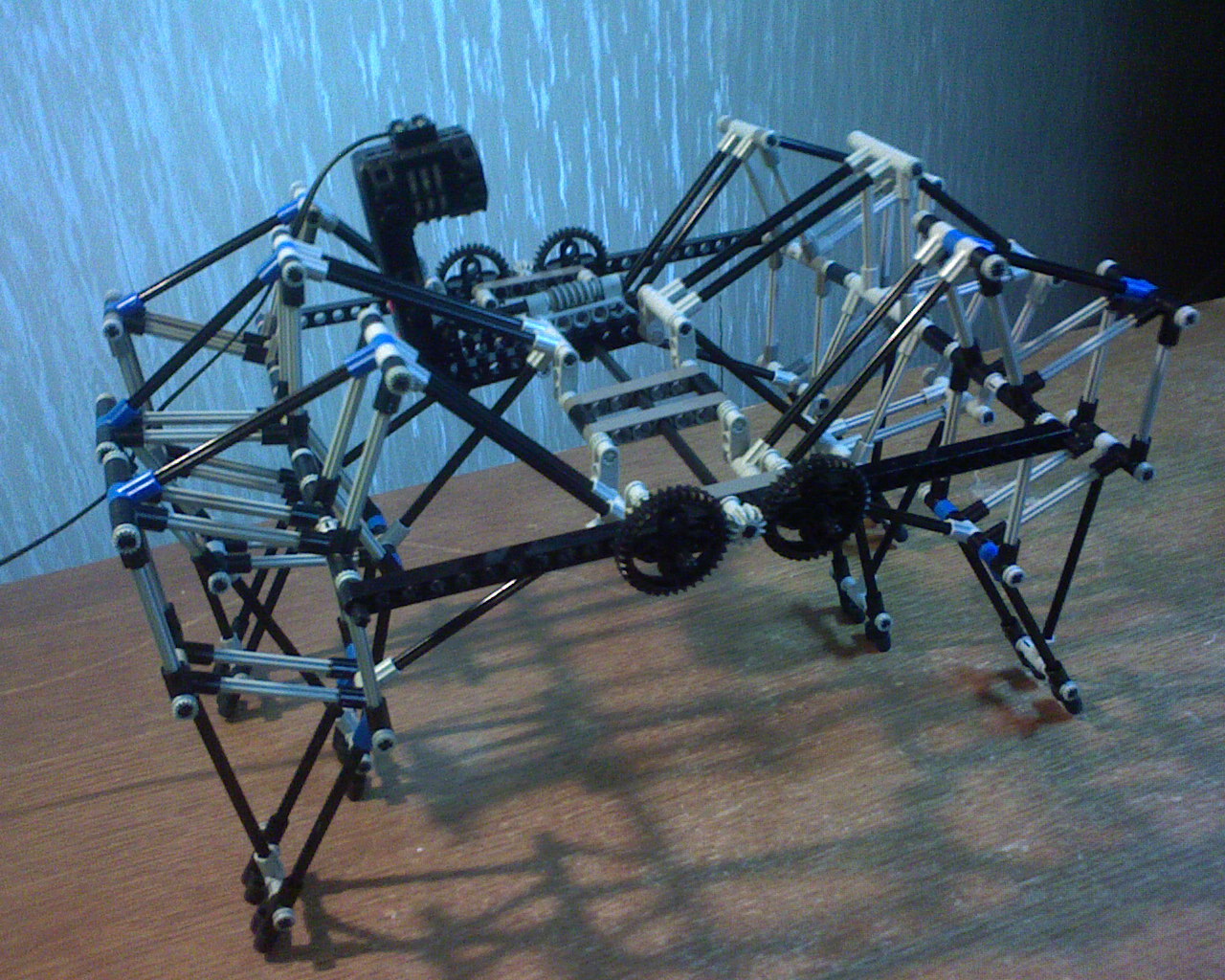
This is a six leg walker, that uses the leg design of
Theo Jansen
After seeing his video
here
I spent some time learning about his 11 tube leg design. I found the best way
to learn about this very neat leg concept is to build one. Once you have it, its
a very stable, and repeatable leg. I have not found any good “how too” to make
this leg. I spent a lot of time, re-playing clips and videos, and looking at
Sim’s of the “TJ” leg.
I have some shots of the ‘bot here:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=280870
and a video of My walker here:
http://www.youtube.com/watch?v=tF50m2OzGZE
I want to thank Janey for being the Flame under my butt. Without her, or the
twenty 7L axles, I would not have broght this walker to its finished state.
After I built the walker, I found a few other people have done this in lego as
well:
http://www.youtube.com/watch?v=369NuGkYA3s
http://www.youtube.com/watch?v=qLW-NPnqbJQ
http://www.youtube.com/watch?v=-51sDl4Oy20
http://www.youtube.com/watch?v=JYZdanpFKo
Chris
Lugnet #91
FUT: rtlToronto
| | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
Chris, its simply amazing. One of the most elegant moving MOCs I have ever
seen. Im blown away how great and streamline it looks and how smooth it
functions. Oh yeah, and its kick butt CREEPY too.
Totally love this MOC, by far, my most favourite of all your builds!
Yeah, I know it wont win an rtl game, its no project X, but I believe it was
well worth the time you spent on it, and Im glad you saw it to completion. Cant
wait to have it displayed with everything else ppl bring to the show.
Oh btw, it IS art!
Janey “Been wowed today, Red Brick”
| | | | | | | | | | | | | | | | | |
| |
This is a six leg walker, that uses the leg design of
Theo Jansen
|
Congratulations, Chris, you wonderfully captured the light and organic structure
of Theo Jansen creations.
Simply wonderful!
Philo
| | | | | | | | | | | | | | | | | |
As I wanted to play with your design (and if possible decrease the number of L7
axles still relatively scarce in my collection...), I modelled it using
Euklides 2.02 geometry freeware.
Euklides file is here.
You can animate the leg by moving the handle. Play with different geometries by
changing segment lengths on the right.
The black curve shows the path of the tip of the leg. A broken or strange curve
indicates impossible geometries.
Play well,
Philo
| | | | | | | | | | | | | | | | | | | | | |
| |
|
Philippe Hurbain wrote:
> As I wanted to play with your design (and if possible decrease the number of L7
> axles still relatively scarce in my collection...), I modelled it using
> <http://www.euklides.hu/eng/euklides.htm Euklides 2.02 geometry freeware>.
>
> <<http://www.brickshelf.com/gallery/Philo/Misc/tj.gif>>
>
> Euklides file is [<http://www.brickshelf.com/gallery/Philo/Misc/tj2.euk here>].
>
> You can animate the leg by moving the handle. Play with different geometries by
> changing segment lengths on the right.
>
> The black curve shows the path of the tip of the leg. A broken or strange curve
> indicates impossible geometries.
>
> Play well,
>
> Philo
I wanted to say thank you for your kind words; I also should add that I
routinely use your page as a guide when thinking about lego motors.
http://www.philohome.com/motors/motorcomp.htm
As to the simulation. It is simply fantastic. I played with it for a
short while, and all I can say, is that it sure would have been helpful
to me to have that before I used my "trial and error" to work on the
prototype leg.
:)
Regards
Chris
| | | | | | | | | | | | | | | | | | | | | | |
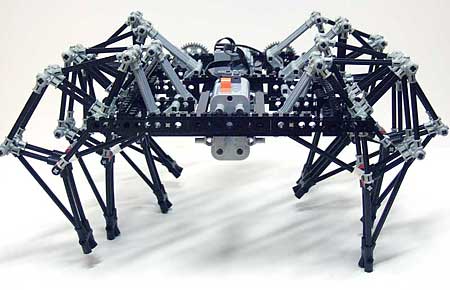
I went on and built my own version, using 8 legs with 90° phase offset and Power
Functions motorization. Still a few things to improve, such as the bad balance
due to the weight of the battery pack...
See it here.
Thanks again for the building incentive ;o)
Philo
| | | | | | | | | | | | | | | | | | | | | | |
Philippe Hurbain wrote:
> <http://www.philohome.com/theo/walker.htm<http://www.philohome.com/theo/w1-t.jpg>>
>
> I went on and built my own version, using 8 legs with 90° phase offset and Power
> Functions motorization. Still a few things to improve, such as the bad balance
> due to the weight of the battery pack...
>
> See it [<http://www.philohome.com/theo/walker.htm here>].
>
> Thanks again for the building incentive ;o)
>
> Philo
Thats a nice walker. Great job, now I want to place a brickshelf order
so i can get more 7L axles. :)
May I ask why you went with a longer axle at the "front" of the leg? As
opposed to making it a "square" design.
Also, great idea on the IR motors for the walker. I wanted to try that
as well, when Janey first suggested it to me, but alas, I am short on
the new power function motors. :)
Chris
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
>
> Thats a nice walker. Great job, now I want to place a brickshelf order
> so i can get more 7L axles. :)
>
> May I ask why you went with a longer axle at the "front" of the leg? As
> opposed to making it a "square" design.
I fiddled with lengths in Euklides till I got a reasonnably flat and horizontal
path for the foot, while keeping axle lengths even, and came up with this one.
After building I had again a closer look at this other simulation:
http://www.mechanisms101.com/theo_jansen.shtml, the bottom of the curve is much
flatter. This comes to a price: the descending part of the curve is almost
tangent to the ground, making it more prone to stumble. Probably the way to go
for low power design, such as the solar version discussed with Brian.
> Also, great idea on the IR motors for the walker. I wanted to try that
> as well, when Janey first suggested it to me, but alas, I am short on
> the new power function motors. :)
Yes, this system is really great... That said, if you go on the solar version
the old 71427 is much better regarding efficiency!
Philo
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
As Elmer Fudd would say, “That MOC wocks!”;-)
All seriousness aside, that is trés cool, Chris. Can’t wait for Ross’
reaction-- He’ll flip out! It’s funny; he’s actually building a robot-thingy (I
think that the technical term) right now as well. Okay, maybe it’s not so
funny.
It reminds me of a
hypercube in motion.
Wock on!
JOHN
| | | | | | | | | | | | | | | | | | | | |
John wrote:
> In lugnet.technic, Chris Magno wrote:
>
> > and a video of My walker here:
> >
> > <http://www.youtube.com/watch?v=tF50m2OzGZE>
>
> As Elmer Fudd would say, "That MOC wocks!";-)
>
> All seriousness aside, that is trés cool, Chris. Can't wait for Ross'
> reaction-- He'll flip out! It's funny; he's actually building a robot-thingy (I
> {think} that the technical term) right now as well. Okay, maybe it's {not} so
> funny.
Thank you John.
Please encourage Ross to work more on robots, and less on that "other"
thing you do.
;)
Also have Ross try the simulator Philo posted. It works like a charm.
> It reminds me of a
> <http://www.yourfilehost.com/media.php?cat=image&file=3f6de8a139ff5b9800879d2c50dfdc36.gif
> hypercube> in motion.
>
> Wock on!
>
> [JOHN]
Hypercube? Nice link. Im going to try to make one of these.
:)
Chris
| | | | | | | | | | | | | | | | | | |
Wow, this is awesome! I can't wait to see it in person.
Derek
| | | | | | | | | | | | | | | | | | | | |
Derek Raycraft wrote:
> Wow, this is awesome! I can't wait to see it in person.
>
> Derek
thanks - it will be there, as well, and a few other odd's and ends.
Chris
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
That is beautiful!!
It’s better than the spider you were working on when first we met!
Nicely done!
Dave K
| | | | | | | | | | | | | | | | | | | | |
David Koudys wrote:
> In lugnet.technic, Chris Magno wrote:
>
>
> That is beautiful!!
>
> It's better than the spider you were working on when first we met!
>
> Nicely done!
>
> Dave K
thanks Dave, glad to see you are still around - we missed you at r22
when I kicked robot butt!
In other news, this leg has inspired me to try to modify it so I can use
it for my grand dream of my 6 leg rcx powered walker.
I dont have video of it, but the leg is very stable with crossing non
level areas.
Chris
better robot builder than dave. (when it comes to swinging)
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
> I found the best way to learn about this very neat leg
> concept is to build one...
..and the best way to introduce someone to Theo Jansen's amazing mechanisms is
to have someone build one out of common materials you have on hand (OK, I'm a
little short of 7L axles as well, but that can be worked around). Really, this
is beautiful, and hypnotic to watch. I would almost certainly have tried to do
it with studless beams, which would have worked... but wouldn't have the
wonderful look of your version. Kudos!
> I want to thank Janey for being the Flame under my butt.
Interesting mental image :-). But still, we always knew she was a robot type at
heart. Now that we're combining art with mechanism, I think I'd try for the
"rhino" version next. Actually, I think I now know what to do with some solar
cells that have been kicking around here...
--
Brian Davis
| | | | | | | | | | | | | | | | | | | | | |
| |
|
Brian Davis wrote:
> In lugnet.technic, Chris Magno wrote:
>
>> I found the best way to learn about this very neat leg
>> concept is to build one...
>
> ..and the best way to introduce someone to Theo Jansen's amazing
mechanisms is
> to have someone build one out of common materials you have on hand
(OK, I'm a
> little short of 7L axles as well, but that can be worked around).
Really, this
> is beautiful, and hypnotic to watch. I would almost certainly have
tried to do
> it with studless beams, which would have worked... but wouldn't have the
> wonderful look of your version. Kudos!
>
Thanks for your kind words.
Mainly because of Brian's "whining" ;) about not having enough 7L
axles, I've thrown together "quasi-instructions" on how to make one leg
using mainly 4's 6's and 8 long axles.
I'm not a CAD'er so Brian (or anyone) can use this montage of photos to
make this version of one leg:
(after moderation)
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=281312
(This is a deep link to the fist photo of 15 pics
http://www.brickshelf.com/gallery/magno/Walker/Leg/aa006.jpg
please add one to the number to get the other photos until moderation)
>> I want to thank Janey for being the Flame under my butt.
>
> Interesting mental image :-) . But still, we always knew she was a
robot type at
> heart. Now that we're combining art with mechanism, I think I'd try
for the
> "rhino" version next. Actually, I think I now know what to do with
some solar
> cells that have been kicking around here...
>
Solar cell's NOW thats a neat idea, and a great way to recreate the
"life" that Theo Jansen envisioned for his beasts.
Chris
* All photos taken with a Sony Ericson k510A cell phone.
** All videos done with a (refurbished) Labtec 640x480 web cam, and
edited with XP moviemaker
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> Mainly because of Brian's "whining" ;)
Ha! That wasn't whining, that was just idle wishing! You wait 'till I've got up
a good head of steam, and *then* I'll show you some whining! ;-)
> ...about not having enough 7L axles...
See, now *there's* a practical way to to shut me up - just send my the parts
:-). I'm actually heading down to the Orlando PAB soon, but I'm not sure they
stock 7L axels... when will we get a Technic PAB I wonder :-).
> I've thrown together "quasi-instructions" on how to
> make one leg using mainly 4's 6's and 8 long axles.
Thank you! That's actually nice photodocumentation, and I'll try to put one
together based on that. I wonder if for larger structures you might need to go
to beams for some of the connections that are under tension during parts of the
cycle.
> Solar cell's NOW thats a neat idea, and a great way
> to recreate the "life" that Theo Jansen envisioned
> for his beasts.
I've been playing with the solar cells and the two capacitors I've got - the
combination runs an unloaded motors for a good long time in and out of the sun.
The question is how low-energy the system can be made. Theo Jansen's creations,
and yours, seem to do a wonderful job of moving horizontally without moving the
center of mass up or down, which is very promising. What happens if you speed up
the driving axles (say, a worm-to-8t instead of a worm-to-24t)?
--
Brian Davis
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.org.ca.rtltoronto, Brian Davis wrote:
> In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> The question is how low-energy the system can be made. Theo Jansen's creations,
> and yours, seem to do a wonderful job of moving horizontally without moving the
> center of mass up or down, which is very promising. What happens if you speed up
> the driving axles (say, a worm-to-8t instead of a worm-to-24t)?
LOL, I will leave it to Chris answer more technically, but I can tell you, I
watched him motor that beast up with a few different motors, and gearing
selections, and I was blown away. With a good torquey (yeah, its a word) motor
and no gearing, that "beast" flew across the room, its feet tapping along the
flooring, VERY CREEPY, but strangely still smooth and reliable. The noise it
made hitting the ground in rapid fire was a bit chilling. Sort of like a mad
scientist gone Lego. Giggle.
Janey "Red Brick"
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Brian Davis wrote:
> In lugnet.org.ca.rtltoronto, Chris Magno wrote:
>
> > Mainly because of Brian's "whining" ;)
> Ha! That wasn't whining, that was just idle wishing! You wait 'till
I've got up
> a good head of steam, and *then* I'll show you some whining! ;-)
>
oh yay - next year will be no Cicada's but a room full of Brian whining.
I'd like to sign up for brickworld now please. (1)
> > I've thrown together "quasi-instructions" on how to
> > make one leg using mainly 4's 6's and 8 long axles.
>
> Thank you! That's actually nice photodocumentation, and I'll try to put one
> together based on that. I wonder if for larger structures you might need to go
> to beams for some of the connections that are under tension during parts of the
> cycle.
I think you need to make one leg - you will be shocked at how well it
preforms. The short answer is no - no need for beams in this leg design.
just the beauty of parallel linkages.
check out philo's gif of the leg motion (the "oval) at the bottom
http://www.philohome.com/theo/tj.gif
the leg is only "taking weight" when the foot is on the ground, and
then, thats when the "back" of the leg is more or less in a line. All
the weight is transfered along the length of the axles "vertically" to
the one point where the entire leg is attached to the frame.
> > Solar cell's NOW thats a neat idea, and a great way
> > to recreate the "life" that Theo Jansen envisioned
> > for his beasts.
>
> I've been playing with the solar cells and the two capacitors I've got - the
> combination runs an unloaded motors for a good long time in and out of the sun.
> The question is how low-energy the system can be made.
Now we get to the real beauty of Theo Jensons designs.
this is a good article:
http://www.artificial.dk/articles/theojansen.htm
near the bottom, you see him pulling his creation along. that thing
weighs in at over 2 tons, and can be moved with air, or a human pulling it.
Theo Jansen, keeps referring to his beasts and the evolution of the wheel.
many of his "walkers" are so... ummm, "balanced," they can be pushed or
pulled, and the friction of one leg on the central cam, turn the entire
thing. thus, like a wheel, you can just lightly push it to get and keep
it going.
Theo Jansen's creations,
> and yours, seem to do a wonderful job of moving horizontally without moving the
> center of mass up or down, which is very promising.
Again, thats the neat-o factor of these linkages/leg design. The "oval"
motion of the foot "path," combined with multiple legs, ensures a
"level" frame, and thus a smooth gait.
What happens if you speed up
> the driving axles (say, a worm-to-8t instead of a worm-to-24t)?
all kidding aside, the answer is... the robot walks faster. Speed does
not affect any portion of this design. the lack of official lego wd-40
or grease means I prefer a more "torquey" motors to overcome the natural
friction of the ABS.
keep in mind, this design is powered by wind, so it dont take a lot of
energy to move. that being said, there is a load on the motors, so i
cant say if solar would work in this instance. these motors need 9Vdc,
and a goodly amount of amps that the solar cells, and capacitors just
cant produce.
Chris
1. Didnt that name come from the co joining of the words brick? and World?
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> Brian Davis wrote:
> >
> > Thank you! That's actually nice photodocumentation, and I'll try to put one
> > together based on that. I wonder if for larger structures you might need to go
> > to beams for some of the connections that are under tension during parts of the
> > cycle.
>
>
> I think you need to make one leg - you will be shocked at how well it
> preforms. The short answer is no - no need for beams in this leg design.
> just the beauty of parallel linkages.
>
> check out philo's gif of the leg motion (the "oval) at the bottom
>
> http://www.philohome.com/theo/tj.gif
>
> the leg is only "taking weight" when the foot is on the ground, and
> then, thats when the "back" of the leg is more or less in a line. All
> the weight is transfered along the length of the axles "vertically" to
> the one point where the entire leg is attached to the frame.
You might find that the beams that pull the leg sideways are under enough
tension with a large version to cause problems though, especially if moving over
difficult terrain.
ROSCO
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.org.ca.rtltoronto, Ross Crawford wrote:
> In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> > Brian Davis wrote:
> > >
> > > Thank you! That's actually nice photodocumentation, and I'll try to put one
> > > together based on that. I wonder if for larger structures you might need to go
> > > to beams for some of the connections that are under tension during parts of the
> > > cycle.
> >
> >
> > I think you need to make one leg - you will be shocked at how well it
> > preforms. The short answer is no - no need for beams in this leg design.
> > just the beauty of parallel linkages.
> >
> > check out philo's gif of the leg motion (the "oval) at the bottom
> >
> > http://www.philohome.com/theo/tj.gif
> >
> > the leg is only "taking weight" when the foot is on the ground, and
> > then, thats when the "back" of the leg is more or less in a line. All
> > the weight is transfered along the length of the axles "vertically" to
> > the one point where the entire leg is attached to the frame.
>
> You might find that the beams that pull the leg sideways are under enough
> tension with a large version to cause problems though, especially if moving over
> difficult terrain.
(Bright blue or bright green in that image depending on direction of travel)
ROSCO
| | | | | | | | | | | | | | | | | | | | | | |
Ross Crawford wrote:
> > >
> > > check out philo's gif of the leg motion (the "oval) at the bottom
> > >
> > > http://www.philohome.com/theo/tj.gif
> > >
> > > the leg is only "taking weight" when the foot is on the ground, and
> > > then, thats when the "back" of the leg is more or less in a line. All
> > > the weight is transfered along the length of the axles "vertically" to
> > > the one point where the entire leg is attached to the frame.
> > You might find that the beams that pull the leg sideways are under enough
> > tension with a large version to cause problems though, especially if moving over
> > difficult terrain.
>
> (Bright blue or bright green in that image depending on direction of travel)
>
> ROSCO
hummmmm, maybe Im not understanding. as I see it, all the "weight" is
at the one pivot point in the leg that attaches to the "frame." (the
thick black line in Philo's Gif.)
Chris
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> Ross Crawford wrote:
>
> > > >
> > > > check out philo's gif of the leg motion (the "oval) at the bottom
> > > >
> > > > http://www.philohome.com/theo/tj.gif
> > > >
> > > > the leg is only "taking weight" when the foot is on the ground, and
> > > > then, thats when the "back" of the leg is more or less in a line. All
> > > > the weight is transfered along the length of the axles "vertically" to
> > > > the one point where the entire leg is attached to the frame.
> > > You might find that the beams that pull the leg sideways are under enough
> > > tension with a large version to cause problems though, especially if moving over
> > > difficult terrain.
> >
> > (Bright blue or bright green in that image depending on direction of travel)
> >
> > ROSCO
>
>
> hummmmm, maybe Im not understanding. as I see it, all the "weight" is
> at the one pivot point in the leg that attaches to the "frame." (the
> thick black line in Philo's Gif.)
But weight is not the only force happening - something has to move it laterally.
When the leg is pulled sideways the link doing the pulling is in tension, the
heavier the bot is, the more tension there will be.
ROSCO
| | | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
| |
After a few long weeks of tinkering, I think Ive settled on a final design
that I would like to display at the Toronto Hobby show.
This is a six leg walker, that uses the leg design of
Theo Jansen
|
So stinkin’ slick!
| | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
I can’t believe I missed the best part of that build!!!!
No, it’s not the wonderfully designed legs
No, it’s not the plethora of 7 l axles
No, it’s not the racer motor providing the power....
It’s the worm to 24 setup that I learned form Chris on THE VERY FIRST DAY I MET
HIM!!!!
(over 7 years ago, iirc)...
Let’s see if I have some pics from that one...
Oh right--here we are--
http://www.sandysparky.net/sumo.htm
And Chris’s ‘bot at that event--

:)
Dave K
| | | | | | | | | | | | | | | | | | | | | |
In lugnet.org.ca.rtltoronto, David Koudys wrote:
| |
In lugnet.technic, Chris Magno wrote:
|
| |
It’s the worm to 24 setup that I learned form Chris on THE VERY FIRST DAY I
MET HIM!!!!
|
It must be his “thing” .... he taught me too, giggle.
| |
And Chris’s ‘bot at that event--
|
HEY MISTER... That bot sucks!
Couldnt resist!
Janey, “AT least my first bot was pretty, Red Brick”
| | | | | | | | | | | | | | | | | | | | | | | | | | |
Janey Cook wrote:
> In lugnet.org.ca.rtltoronto, David Koudys wrote:
> > In lugnet.technic, Chris Magno wrote:
>
> > It's the worm to 24 setup that I learned form Chris on THE VERY FIRST DAY I
> > MET HIM!!!!
>
> It must be his "thing" .... he taught me too, giggle.
oh i'll show you a "thing" or two!
> > And Chris's 'bot at that event--
> >
> > <<http://www.sandysparky.net/sumo/tn_p004514_jpg.jpg>>
>
> HEY MISTER... That bot sucks!
>
> Couldnt resist!
>
> Janey, "AT least my first bot was pretty, Red Brick"
ummm, do we really want to talk about your pretty PINk robot?
really?
Chris
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.org.ca.rtltoronto, Chris Magno wrote:
| |
Janey Cook wrote:
| |
In lugnet.org.ca.rtltoronto, David Koudys wrote:
| |
In lugnet.technic, Chris Magno wrote:
|
|
|
| |
| |
| |
And Chris’s ‘bot at that event--
|
HEY MISTER... That bot sucks!
Couldnt resist!
Janey, “AT least my first bot was pretty, Red Brick”
|
ummm, do we really want to talk about your pretty PINk robot?
really?
|
Uh, no, I guess not, or you might send
me to bed again.
Janey “Look, this is me behaving, Red Brick”
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Janey Cook wrote:
> > >
> > > Janey, "AT least my first bot was pretty, Red Brick"
> > ummm, do we really want to talk about your pretty PINk robot?
> >
> > really?
>
> Uh, no, I guess not, <http://news.lugnet.com/org/ca/obb/?n=23 or you might send
> me to bed again.>
>
> Janey "Look, this is me behaving, Red Brick"
Murfled!
:)
Chris
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
David Koudys wrote:
> In lugnet.technic, Chris Magno wrote:
>
>
> I can't believe I missed the best part of that build!!!!
>
> No, it's not the wonderfully designed legs
>
> No, it's not the plethora of 7 l axles
>
> No, it's not the racer motor providing the power....
>
> It's the worm to 24 setup that I learned form Chris on THE VERY FIRST DAY I MET
> HIM!!!!
>
> (over 7 years ago, iirc)...
>
> Let's see if I have some pics from that one...
>
> Oh right--here we are--
>
> <http://www.sandysparky.net/sumo.htm>
>
> And Chris's 'bot at that event--
>
> <<http://www.sandysparky.net/sumo/tn_p004514_jpg.jpg>>
>
> :)
>
> Dave K
WOW - those were the good old days.
thats when I could make a robot in less than 10 min, on the same day of
the game.
If I recall, the day went like this:
my bot starts to push your bot;
http://www.sandysparky.net/sumo/tn_p004465_jpg.jpg
then,
my bot pushes your out of the ring.
http://www.sandysparky.net/sumo/tn_p004466_jpg.jpg
:)
As to the worm to 24 - I love that design.
Chris
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> If I recall, the day went like this:
>
> my bot starts to push your bot;
>
> http://www.sandysparky.net/sumo/tn_p004465_jpg.jpg
>
> then,
>
> my bot pushes your out of the ring.
>
> http://www.sandysparky.net/sumo/tn_p004466_jpg.jpg
>
> :)
yeah, that's about how i remembered it as well
Dave K
| | | | | | | | | | | | | | | | | | | | | | |
David Koudys wrote:
> In lugnet.org.ca.rtltoronto, Chris Magno wrote:
>
> > If I recall, the day went like this:
> >
> > my bot starts to push your bot;
> >
> > http://www.sandysparky.net/sumo/tn_p004465_jpg.jpg
> >
> > then,
> >
> > my bot pushes your out of the ring.
> >
> > http://www.sandysparky.net/sumo/tn_p004466_jpg.jpg
> >
> > :)
>
>
> yeah, that's about how i remembered it as well
>
> Dave K
ok, who are you and what did you do with the REAL Dave K?
I set you up for some good classic rtl smack, and thats what I got?
Dave, go back and please try again. I rate that at D-.
Chris
| | | | | | | | | | | | | | | | | |
In lugnet.technic, Chris Magno wrote:
| |
After a few long weeks of tinkering, I think Ive settled on a final design
that I would like to display at the Toronto Hobby show.
|
That’s a very neat walker. I believe
this tractor used a very similar mechanism, but I didn’t bother to do a sketch.
If you want to check it out yourself it’s at the transport museum in Wetaskiwin
Alberta. Or at least it was in 2001.
I don’t have a video either.
ROSCO
| | | | | | | | | | | | | | | | |
Ross Crawford wrote:
> In lugnet.technic, Chris Magno wrote:
> > After a few long weeks of tinkering, I think Ive settled on a final design
> > that I would like to display at the <http://news.lugnet.com/org/ca/obb/?n=22
> > Toronto Hobby show.>
>
> That's a very neat walker. I believe
> <http://www.br-eng.info/gallery/v/general/holidays/na2001/TransportMuseum/Picture_0215.jpg.html
> this tractor> used a very similar mechanism, but I didn't bother to do a sketch.
> If you want to check it out yourself it's at the transport museum in Wetaskiwin
> Alberta. Or at least it was in 2001.
>
> I don't have a video either.
>
> ROSCO
thanks Ross.
Thats also a neat looking tractor. Im going to go look at it some more.
Chris
| | | | | | |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}