 | | | | | |
Here's a "rover robot" built,apparently, out of the new IR Bulldozer. August is
much too far away. I like the look of those motors, not just for this but for
GBC modules and other "simple" automation, and (if the IR system is compatiable)
with the RCX and perhaps the NXT IR bridges. Take a look:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226242
(no, not mine... I wish... Oh mister Be-llis...)
--
Brian Davis
| | | | | | | | | | | | | | | |
"Brian Davis" <brdavis@iusb.edu> wrote in message
news:JDvpqM.JGG@lugnet.com...
> Here's a "rover robot" built,apparently, out of the new IR Bulldozer.
> August is
> much too far away. I like the look of those motors, not just for this but
> for
> GBC modules and other "simple" automation, and (if the IR system is
> compatiable)
> with the RCX and perhaps the NXT IR bridges. Take a look:
>
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226242
>
> (no, not mine... I wish... Oh mister Be-llis...)
>
> --
> Brian Davis
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=2335910
Based on the gap in the motor housing (between the light bley and dark bley)
, it looks like Mark already has taken his motor apart (or dropped it). Oh
Mark!?! And are the new battery connectors compatible with the old ones?
-Rob
www.brickmodder.net
| | | | | | | | | | | | | | | | | | |
| |

|
In lugnet.technic, Brian Davis wrote:
> Here's a "rover robot" built,apparently, out of the new IR Bulldozer. August is
> much too far away. I like the look of those motors, not just for this but for
> GBC modules and other "simple" automation, and (if the IR system is compatiable)
> with the RCX and perhaps the NXT IR bridges. Take a look:
>
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226242
>
> (no, not mine... I wish... Oh mister Be-llis...)
Well spotted Brian :-)
The electric elements are those that will feature in the new Bulldozer. The
rest of the MOC is parts from my own collection, NOT the rest of the Bulldozer!
(that many beams with studs would be too much to hope for :-) )
Two large motors (with great torque!) do the tank drive on channel 1, with two
smaller motors doing the stilts at the back, to tip the robot up for picking up
objects) and the grab at the front on channel 2. On a single handset you change
channel to select the different functions in pairs.
For automation, the centre of rotation of the handset levers is aligned with one
of the beam holes on the side, so you can have a motor controlled by one handset
move the levers on another handset. This means you can have sequential
automation and all sorts of fun! The system can branch too, by having more than
one receiver set to each channel number. It could also do an "OR" function by
having two handsets transmit on the same channel (OK as long as the directions
don't conflict).
There is also my experiment in fitting the large motors to a walker chassis,
where the great torque comes into its own:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226243
This robot has enough torque to buck if the legs are aligned rather than being
opposed, but it can make the 24-tooth cogs jump on the axles! I think the large
motors are what many fans have wanted for years. The jumping of 24-tooth cogs
was why I used 12 and 36-tooth cogs for the rover.
More MOC pictures built with the bulldozer electric elements (battery box,
handset, receiver, large and medium motors) will appear in my Power Functions
Brickshelf folder (when moderated) as I build them, so this is the space to
watch :-) http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241
I advise saving up for as many bulldozers as you can carry! (BTW I don't have
the kit).
There are some differences between the RCX, IR Train and Power Function IR
systems. I'm not an expert in that but Stefan Vorst has worked it out in more
detail.
There will be some compatibility of the Power Function system with the 9V
system, such that you will be able to drive a 9V motor or light from a Power
Function receiver or battery box if you use the right elements. I'll say more
about that when I can. This compatibility is something we AFOLs have pushed for
and shows the benefit of us being involved.
Mark
| | | | | | | | | | | | | | | | | | | | | |
I guess it is too much to wish for to ask if the bigger motors also have
encoders?
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Mark Bellis wrote:
snip
| |
Well spotted Brian :-)
The electric elements are those that will feature in the new Bulldozer. The
rest of the MOC is parts from my own collection, NOT the rest of the
Bulldozer! (that many beams with studs would be too much to hope for :-) )
Two large motors (with great torque!) do the tank drive on channel 1, with two
smaller motors doing the stilts at the back, to tip the robot up for picking
up objects) and the grab at the front on channel 2. On a single handset you
change channel to select the different functions in pairs.
For automation, the centre of rotation of the handset levers is aligned with
one of the beam holes on the side, so you can have a motor controlled by one
handset move the levers on another handset. This means you can have
sequential automation and all sorts of fun! The system can branch too, by
having more than one receiver set to each channel number. It could also do an
“OR” function by having two handsets transmit on the same channel (OK as long
as the directions don’t conflict).
There is also my experiment in fitting the large motors to a walker chassis,
where the great torque comes into its own:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226243
This robot has enough torque to buck if the legs are aligned rather than being
opposed, but it can make the 24-tooth cogs jump on the axles! I think the
large motors are what many fans have wanted for years. The jumping of
24-tooth cogs was why I used 12 and 36-tooth cogs for the rover.
More MOC pictures built with the bulldozer electric elements (battery box,
handset, receiver, large and medium motors) will appear in my Power Functions
Brickshelf folder (when moderated) as I build them, so this is the space to
watch :-) http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241
I advise saving up for as many bulldozers as you can carry! (BTW I don’t have
the kit).
There are some differences between the RCX, IR Train and Power Function IR
systems. I’m not an expert in that but Stefan Vorst has worked it out in more
detail.
There will be some compatibility of the Power Function system with the 9V
system, such that you will be able to drive a 9V motor or light from a Power
Function receiver or battery box if you use the right elements. I’ll say more
about that when I can. This compatibility is something we AFOLs have pushed
for and shows the benefit of us being involved.
Mark
|
Wow mark, thank you for the info on this really cool controller and all of the
pictures we would otherwise not see. I personally can’t wait to get my hands on
3-4 sets but until then I’ll have to keep wiping the drool off my keyboard.
A few comments:
I’m not a huge fan of IR-rc because of its directional limitations but it’s
something I can live with and i think others agree. I can see this system being
used in several themes including TRAINS, as it is a pretty cool solution the
extremely limited train IR system. Now granted it’s still IR and not RC as most
would prefer, but I’ll take what I can get as it’s still a cool product.
Some have commented that they don’t like the integrated wires but I see this as
a plus. There are a couple of reasons for this but for the large part it will be
nice to not have to hunt for wires to connect everything. Now I’m not saying
they shouldn’t offer extension wires but for compact projects and or tight
spaces integrated wires is a good thing.
inny’s!!!!! I was a very happy camper when the monkey set came out several
years ago with an inny for the output shaft on the motor and I’m glad to see it
stuck around. This seemingly simple design change makes the motor harder to
produce but it increases its usability by 100%.
That motor is huge! I’m not sure I’ll get much use out of it in the train world
but robot builders are going to love it. It makes me want to start building
techinc models again or at least that 1/16th scale M1 Abrams tank I’ve wanted to
build for years.
I’ll wait for Stefan Vorst to chime in for info on IR compatibility between
systems but I do have several questions I hope you can answer.
questions
- On the controller I noticed that there appears to be 4 channels. Is assumption correct?
- Does this system act like an on/off switch or does it have some limited speed control?
- Does this system use 3 batteries or 6? i can’t tell from the photo
- In set 4958 “dinosaur” which also uses the same IR control system, there seems to be something white that looks like either a small sound box or small motor. What is it?
- Will extension wires be available?
- Did you happen to check the range on the controler/reciver?
- The hacker in me has to ask: is the receiver unit glued, screwed or snapped together?
- I noticed little black switches next to the main controls on the controller. Are these to fine-tune the controls much in the same way as RC controllers and if pushed to the extreme will the controller remain in an “on” position?
Ok I’m sorry that was a lot of questions. I hope you don’t mind. I’m just
extremely curious.
Again thank you for the photos and the info as It’s extremely appreciated,
Ondrew
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Ondrew Hartigan wrote:
| |
In lugnet.technic, Mark Bellis wrote:
snip
| |
Well spotted Brian :-)
The electric elements are those that will feature in the new Bulldozer. The
rest of the MOC is parts from my own collection, NOT the rest of the
Bulldozer! (that many beams with studs would be too much to hope for :-) )
Two large motors (with great torque!) do the tank drive on channel 1, with
two smaller motors doing the stilts at the back, to tip the robot up for
picking up objects) and the grab at the front on channel 2. On a single
handset you change channel to select the different functions in pairs.
For automation, the centre of rotation of the handset levers is aligned with
one of the beam holes on the side, so you can have a motor controlled by one
handset move the levers on another handset. This means you can have
sequential automation and all sorts of fun! The system can branch too, by
having more than one receiver set to each channel number. It could also do
an “OR” function by having two handsets transmit on the same channel (OK as
long as the directions don’t conflict).
There is also my experiment in fitting the large motors to a walker chassis,
where the great torque comes into its own:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226243
This robot has enough torque to buck if the legs are aligned rather than
being opposed, but it can make the 24-tooth cogs jump on the axles! I think
the large motors are what many fans have wanted for years. The jumping of
24-tooth cogs was why I used 12 and 36-tooth cogs for the rover.
More MOC pictures built with the bulldozer electric elements (battery box,
handset, receiver, large and medium motors) will appear in my Power
Functions Brickshelf folder (when moderated) as I build them, so this is the
space to watch :-) http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241
I advise saving up for as many bulldozers as you can carry! (BTW I don’t
have the kit).
There are some differences between the RCX, IR Train and Power Function IR
systems. I’m not an expert in that but Stefan Vorst has worked it out in
more detail.
There will be some compatibility of the Power Function system with the 9V
system, such that you will be able to drive a 9V motor or light from a Power
Function receiver or battery box if you use the right elements. I’ll say
more about that when I can. This compatibility is something we AFOLs have
pushed for and shows the benefit of us being involved.
Mark
|
Wow mark, thank you for the info on this really cool controller and all of
the pictures we would otherwise not see. I personally can’t wait to get my
hands on 3-4 sets but until then I’ll have to keep wiping the drool off my
keyboard.
A few comments:
I’m not a huge fan of IR-rc because of its directional limitations but it’s
something I can live with and i think others agree. I can see this system
being used in several themes including TRAINS, as it is a pretty cool
solution the extremely limited train IR system. Now granted it’s still IR and
not RC as most would prefer, but I’ll take what I can get as it’s still a
cool product.
Some have commented that they don’t like the integrated wires but I see this
as a plus. There are a couple of reasons for this but for the large part it
will be nice to not have to hunt for wires to connect everything. Now I’m not
saying they shouldn’t offer extension wires but for compact projects and or
tight spaces integrated wires is a good thing.
inny’s!!!!! I was a very happy camper when the monkey set came out several
years ago with an inny for the output shaft on the motor and I’m glad to see
it stuck around. This seemingly simple design change makes the motor harder
to produce but it increases its usability by 100%.
That motor is huge! I’m not sure I’ll get much use out of it in the train
world but robot builders are going to love it. It makes me want to start
building techinc models again or at least that 1/16th scale M1 Abrams tank
I’ve wanted to build for years.
I’ll wait for Stefan Vorst to chime in for info on IR compatibility between
systems but I do have several questions I hope you can answer.
questions
- On the controller I noticed that there appears to be 4 channels. Is assumption correct?
|
Yes, 4 channels, each controlling 2 motors at once. 8-motor RC MOCs for anyone
who buys 2 bulldozers!
| |
- Does this system act like an on/off switch or does it have some limited speed control?
|
This one is on-off. I hope that a proportional control of some kind will
develop but I have no information and couldn’t tell you if I did! I have found
it OK to feather the on-off control of a tank drive robot in order to steer
accurately. It helps that my robot has the large motors geared down 12:36 nto
82mm wheels, which gives a good in-house controllable robot speed and enough
torque to run over an undulating duvet on a bed.
| |
- Does this system use 3 batteries or 6? i can’t tell from the photo • 3 AAA batteries in the handset and 6 AAs in the battery box.
- In set 4958 “dinosaur” which also uses the same IR control system, there seems to be something white that looks like either a small sound box or small motor. What is it?
|
I think it’s a sound module. There is a motorbike one in some racer sets but I
think this one might roar.
| |
- Will extension wires be available?
|
Yes, no word on a date though. Compatibility with existing 9V connectors will
be included in these.
| |
- Did you happen to check the range on the controler/reciver?
|
No. This would probably be under wraps till the kits are in the shops anyway.
I expect the range is at least as good as the RC train. The range will depend
to some extent on ambient light conditions.
| |
- The hacker in me has to ask: is the receiver unit glued, screwed or snapped together?
|
Screwed. I have opened one but of course I can’t tell you what’s inside :-) It
still worked 100% after I put it back together :-)
| |
- I noticed little black switches next to the main controls on the controller. Are these to fine-tune the controls much in the same way as RC controllers and if pushed to the extreme will the controller remain in an “on” position?
|
They permanently reverse the direction commanded by each main lever (one for
each). This gets round situations of opposite rotation of the 2 channels in
tank drive models.
One advantage of the design of the handset is that a rotating axle could operate
the levers. Indeed the centre of rotation of the levers lines up with a hole in
the beam on the side of the handset. This has possibilities for 2 or more
machines controlling each other. Let’s say machine 1 receives on channel 2 but
transmits on channel 1 and machine 2 does the same with the channels swapped.
Machine 1 commands machine 2 to do something and as part of the task, machine 2
pushes a lever to send a command back to machine 1. The exchange of commands
contines, making a repeating sequence. A whole factory is possible :-)
| |
Ok I’m sorry that was a lot of questions. I hope you don’t mind. I’m just
extremely curious.
Again thank you for the photos and the info as It’s extremely appreciated,
Ondrew
|
That’s OK. I’m quite happy to tell you what I can. I see the full set of
photos at http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 is now visible.
I’ll have some more MOCs to post there soon.
I’ve added to my point mechanisms folder my successful test of the PF medium
motor as a switch point control motor:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=230517 It’s a good substitute
for a 71427, 43362 or 47154 motor.
Mark
| | | | | | | | | | | | | | | | | |
1). I am envious...
2). Can you post pictures of the underside of the connector, the battery box
connector and the IR connector?
I would much appreciate it, thanks.
"Brian Davis" <brdavis@iusb.edu> wrote in message
news:JDvpqM.JGG@lugnet.com...
> Here's a "rover robot" built,apparently, out of the new IR Bulldozer.
> August is
> much too far away. I like the look of those motors, not just for this but
> for
> GBC modules and other "simple" automation, and (if the IR system is
> compatiable)
> with the RCX and perhaps the NXT IR bridges. Take a look:
>
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226242
>
> (no, not mine... I wish... Oh mister Be-llis...)
>
> --
> Brian Davis
| | | | | | | | | | | | | | | | |
In lugnet.technic, Dan Berladyn wrote:
> 1). I am envious...
>
> 2). Can you post pictures of the underside of the connector, the battery box
> connector and the IR connector?
>
> I would much appreciate it, thanks.
Here are the pictures of the Power Functions elements from the Bulldozer 8275,
including pictures of the plugs.
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 (when modified).
You can see it's a 4-wire system. There are basically 2 wires for power and 2
for control. I'll give more details when I can.
There will be compatibility with the 9V system sufficient to allow existing 9V
motors, lights and leads to be used with this system. It will also be a route
to facilitate end-to-end connections. This is not yet obvious but, again, I
will post more details and pictures when I can.
Mark
| | | | | | | | | | | | | | | | | |
In lugnet.robotics, Mark Bellis wrote:
>
> Here are the pictures of the Power Functions elements from the Bulldozer 8275,
> including pictures of the plugs.
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 (when modified).
You probably mean moderated ;)
> You can see it's a 4-wire system. There are basically 2 wires for power and 2
> for control. I'll give more details when I can.
>
> There will be compatibility with the 9V system sufficient to allow existing 9V
> motors, lights and leads to be used with this system. It will also be a route
> to facilitate end-to-end connections. This is not yet obvious but, again, I
> will post more details and pictures when I can.
Thanks for the info, can't wait to see the pics.
ROSCO
| | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> In lugnet.technic, Dan Berladyn wrote:
> > 1). I am envious...
> >
> > 2). Can you post pictures of the underside of the connector, the battery box
> > connector and the IR connector?
> >
> > I would much appreciate it, thanks.
>
> Here are the pictures of the Power Functions elements from the Bulldozer 8275,
> including pictures of the plugs.
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 (when modified).
>
> You can see it's a 4-wire system. There are basically 2 wires for power and 2
> for control. I'll give more details when I can.
>
> There will be compatibility with the 9V system sufficient to allow existing 9V
> motors, lights and leads to be used with this system. It will also be a route
> to facilitate end-to-end connections. This is not yet obvious but, again, I
> will post more details and pictures when I can.
>
> Mark
hey mark,
thank you for posting all of this info. i look forward to seeing the gallery
but it seems to be taking forever to be moderated. is there a chance you could
post some deep links?
ondrew
| | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.robotics, Ondrew Hartigan wrote:
> In lugnet.technic, Mark Bellis wrote:
> > In lugnet.technic, Dan Berladyn wrote:
> > > 1). I am envious...
> > >
> > > 2). Can you post pictures of the underside of the connector, the battery box
> > > connector and the IR connector?
> > >
> > > I would much appreciate it, thanks.
> >
> > Here are the pictures of the Power Functions elements from the Bulldozer 8275,
> > including pictures of the plugs.
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 (when modified).
> >
> > You can see it's a 4-wire system. There are basically 2 wires for power and 2
> > for control. I'll give more details when I can.
> >
> > There will be compatibility with the 9V system sufficient to allow existing 9V
> > motors, lights and leads to be used with this system. It will also be a route
> > to facilitate end-to-end connections. This is not yet obvious but, again, I
> > will post more details and pictures when I can.
> >
> > Mark
>
> hey mark,
> thank you for posting all of this info. i look forward to seeing the gallery
> but it seems to be taking forever to be moderated. is there a chance you could
> post some deep links?
I'm guessing there's a video. If so, I would recommend putting the video in a
sub-folder by itself, as it is probably what is causing the delay.
ROSCO
| | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Ondrew Hartigan wrote:
> In lugnet.technic, Mark Bellis wrote:
> > In lugnet.technic, Dan Berladyn wrote:
> > > 1). I am envious...
> > >
> > > 2). Can you post pictures of the underside of the connector, the battery box
> > > connector and the IR connector?
> > >
> > > I would much appreciate it, thanks.
> >
> > Here are the pictures of the Power Functions elements from the Bulldozer 8275,
> > including pictures of the plugs.
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 (when modified).
> >
> > You can see it's a 4-wire system. There are basically 2 wires for power and 2
> > for control. I'll give more details when I can.
> >
> > There will be compatibility with the 9V system sufficient to allow existing 9V
> > motors, lights and leads to be used with this system. It will also be a route
> > to facilitate end-to-end connections. This is not yet obvious but, again, I
> > will post more details and pictures when I can.
> >
> > Mark
>
> hey mark,
> thank you for posting all of this info. i look forward to seeing the gallery
> but it seems to be taking forever to be moderated. is there a chance you could
> post some deep links?
> ondrew
OK, here's a few while you wait :-)
Basic system as used in the creator dinosaur set 4958 (inc handset & battery
box):
http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_basic_system_for_dinosaur.jpg
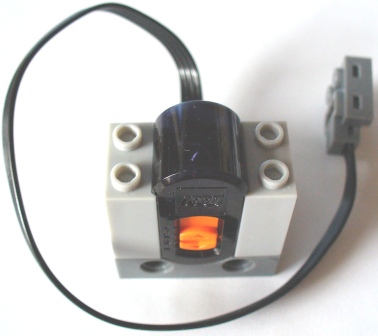
RC IR receiver:
http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_front.jpg
http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_rear.jpg
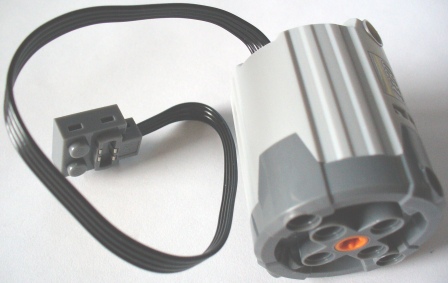
Large motor (inc plug top):
http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_large_motor.jpg
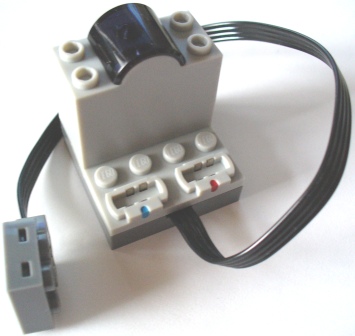
Medium motor (inc stud recesses on bottom and plug bottom):
http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor.jpg
http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor_bottom.jpg
Mark
| | | | | | | | | | | | | | | | | |
Subject:
|
cool robot
|
Newsgroups:
|
lugnet.robotics
|
Date:
|
Tue, 27 Feb 2007 22:52:41 GMT
|
Original-From:
|
dan miller <DANBMIL99@YAHOOantispam.COM>
|
Viewed:
|
4882 times
|
| |
|
it's not lego, but here's a robot I'm working on:
http://anybots.com/
Personally, I think a balancing biped can be built with NXT. It's an open
challenge!
-dbm
| | | | | | | | | | | | | | | | | | | | |
Subject:
|
RE: cool robot
|
Newsgroups:
|
lugnet.robotics
|
Date:
|
Wed, 28 Feb 2007 14:00:26 GMT
|
Original-From:
|
Tac Tacelosky/Smokefree DC <tac@cheztac.*spamcake*com>
|
Viewed:
|
4776 times
|
| |
|
Wow, that's very cool!
It's hard to get a sense of scale from the video -- how tall is the
robot?
What technology are you using for the balancing? I would think this to
be quite difficult with the standard NXT set, but maybe possible with
some additional third-party sensors.
Anyway, congrats on a very slick robot!
Tac
-----Original Message-----
From: dan miller [mailto:danbmil99@yahoo.com]
Sent: Tuesday, February 27, 2007 5:53 PM
To: lego-robotics@crynwr.com
Subject: cool robot
it's not lego, but here's a robot I'm working on:
http://anybots.com/
Personally, I think a balancing biped can be built with NXT. It's an
open challenge!
-dbm
| | | | | | | | | | | | | | | | | | | | |
| |
|
> OK, here's a few while you wait :-)
>
> Basic system as used in the creator dinosaur set 4958 (inc handset &
> battery
> box):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_basic_system_for_dinosaur.jpg
>
> RC IR receiver:
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_front.jpg
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_rear.jpg
>
> Large motor (inc plug top):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_large_motor.jpg
>
> Medium motor (inc stud recesses on bottom and plug bottom):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor.jpg
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor_bottom.jpg
>
> Mark
I can't say that I am a fan of the "permanent wires" or the connector end
itself, but perhaps I just don't like change. I wonder if there will be
extension cables for sale? Actually the more I think about it, the more I
forsee the attached cables being a problem (either too long or too short).
Thanks for the pics.
Dan
| | | | | | | | | | | | | | | | | | | | | |
| |
|
On 28/02/07, Dan Berladyn <dberladyn@hotmail.com> wrote:
> > OK, here's a few while you wait :-)
> >
> > Basic system as used in the creator dinosaur set 4958 (inc handset &
> > battery
> > box):
> > http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_basic_system_for_dinosaur.jpg
> >
> > RC IR receiver:
> > http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_front.jpg
> > http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_rear.jpg
> >
> > Large motor (inc plug top):
> > http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_large_motor.jpg
> >
> > Medium motor (inc stud recesses on bottom and plug bottom):
> > http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor.jpg
> > http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor_bottom.jpg
> >
> > Mark
>
>
>
> I can't say that I am a fan of the "permanent wires" or the connector end
> itself, but perhaps I just don't like change. I wonder if there will be
> extension cables for sale? Actually the more I think about it, the more I
> forsee the attached cables being a problem (either too long or too short).
>
> Thanks for the pics.
>
> Dan
Hmm, I will add my voice in saying thanks for the pics. Definitely interesting.
I agree that I would prefer to have connector terminals on active
bricks, and not permanently attached cables.
What also I find awkward is that we now have divergence in Lego
connector styles, which is not a great thing. There is the old style
two core, which I can reasonably agree is no longer adequate. the NXT
connector, and this connector. It does not bode well for expanding
sets with compatible pieces. I realise that the NXT connectors are in
many ways not quite "Lego Like", but they are a very appropriate
connector, with good firm connections.
Will adaptor cables be available for this new style to be usable with
the NXT maybe? I would love to be able to connect that IR receiver
there to it.
One more thing (and I am in danger of having missed another thread if
it was mentioned there) - has the IR been figured out here yet? Is it
similar to the Manas protocol?
Cheers,
Danny
--
Danny Staple MBCS
OrionRobots
http://orionrobots.co.uk/blogs/dannystaple
(Full contact details available through website)
| | | | | | | | | | | | | | | | | | | | |
| |
|
I searched for the dinosaur set on Brickshelf and got a fuzzy pic of the
box. Apart from the elements you mention there appears to be a white box
which could be a sound system. Can you explain what it is and how it
ties into all of this?
linmix
Mark Bellis wrote:
> In lugnet.technic, Ondrew Hartigan wrote:
>
> > In lugnet.technic, Mark Bellis wrote:
> >
> > > In lugnet.technic, Dan Berladyn wrote:
> > >
> > > > 1). I am envious...
> > > >
> > > > 2). Can you post pictures of the underside of the connector, the battery box
> > > > connector and the IR connector?
> > > >
> > > > I would much appreciate it, thanks.
> > >
> > > Here are the pictures of the Power Functions elements from the Bulldozer 8275,
> > > including pictures of the plugs.
> > > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241 (when modified).
> > >
> > > You can see it's a 4-wire system. There are basically 2 wires for power and 2
> > > for control. I'll give more details when I can.
> > >
> > > There will be compatibility with the 9V system sufficient to allow existing 9V
> > > motors, lights and leads to be used with this system. It will also be a route
> > > to facilitate end-to-end connections. This is not yet obvious but, again, I
> > > will post more details and pictures when I can.
> > >
> > > Mark
> >
> > hey mark,
> > thank you for posting all of this info. i look forward to seeing the gallery
> > but it seems to be taking forever to be moderated. is there a chance you could
> > post some deep links?
> > ondrew
>
>
> OK, here's a few while you wait :-)
>
> Basic system as used in the creator dinosaur set 4958 (inc handset & battery
> box):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_basic_system_for_dinosaur.jpg
>
> RC IR receiver:
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_front.jpg
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_rear.jpg
>
> Large motor (inc plug top):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_large_motor.jpg
>
> Medium motor (inc stud recesses on bottom and plug bottom):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor.jpg
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor_bottom.jpg
>
> Mark
>
>
| | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
> OK, here's a few while you wait :-)
Thank you! I like the small(er) size of the motors; do the large motors also
have a stud recesses down one side? It actually looks in both bases as if the
pin connections are fairly well placed. I'm not overjoyed with the "hard-wired"
nature of these either, but with those small thin cables it does allow you to
mount these motors into tighter spots without worrying as much about leaving the
connector plug avalible (or, for kids, loosing the wires). It also looks like
the outputs from the IR system are color-coded? And since you called them the
"large motor" and "medium motor", well... can I hope?
Out of curiosity, have you tried the "magic motor demo" with these yet? It
certainly looks like you could stack outputs, which could be interesting.
Heck, this stuff is small enough that now my large-scale NXT-guided robot could
arry a small-scale ROV for "tight space exploring". Line-of-sight IR back to the
NXT carrier, then BT control back to my handset, with the whole thing visible on
video with my minispycam attached to the main chassis or ROV. Ideas, ideas...
--
Brian Davis (who is wondering why, if those Power Function cables are flexible,
the NXT ones had to be thicker... not that I mind with the way I sometimes abuse
my cables, mind you...)
| | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Brian Davis wrote:
> In lugnet.technic, Mark Bellis wrote:
>
> > OK, here's a few while you wait :-)
>
> Thank you! I like the small(er) size of the motors; do the large motors also
> have a stud recesses down one side? It actually looks in both bases as if the
> pin connections are fairly well placed. I'm not overjoyed with the "hard-wired"
> nature of these either, but with those small thin cables it does allow you to
> mount these motors into tighter spots without worrying as much about leaving the
> connector plug avalible (or, for kids, loosing the wires). It also looks like
> the outputs from the IR system are color-coded? And since you called them the
> "large motor" and "medium motor", well... can I hope?
>
> Out of curiosity, have you tried the "magic motor demo" with these yet? It
> certainly looks like you could stack outputs, which could be interesting.
>
> Heck, this stuff is small enough that now my large-scale NXT-guided robot could
> arry a small-scale ROV for "tight space exploring". Line-of-sight IR back to the
> NXT carrier, then BT control back to my handset, with the whole thing visible on
> video with my minispycam attached to the main chassis or ROV. Ideas, ideas...
All the pics should be visible now, at
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=226241
The large motors have 2 half-depth pin recesses on opposite sides. They are
designed primarily for a Technic beam interface because of their high torque -
other models might fall apart!
I held them in my rover robot by as many holes as possible because of this, and
chose a beams-and-plates chassis for better rigidity, as I expected studless
construction to warp with the torque.
The IR handset and receiver have red and blue outputs - 2 outputs controlled for
each of 4 channels in turn.
You can hope, as I do, but even if I knew, I couldn't tell you! :-)
The magic motor test doesn't have the same coupling ability as 71427 gearmotors,
probably because the gearing is so much higher with the new motors. The extra
power and torque at similar speed makes them a good substitute for 71427, 43362
or 47154 motors.
Outputs can be stacked, yes. Not sure too many large motors on one output would
work too well, due to ultimate current output limits, but I've successfully used
multiple medium motors on each output, in cases where it makes more sense to use
2 medium motors without gearing than one large one geared up. MOCs (to follow
soon) will illustrate this.
To interface the PF motors with the NXT, I guess the NXT 9V adapter cables are
the official way to go, since the PF system will have 9V compatibility. I'm
sure it won't take long for AFOLs to cut the leads :-)
Mark
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Mark Bellis wrote:
>
> To interface the PF motors with the NXT, I guess the NXT 9V adapter cables are
> the official way to go, since the PF system will have 9V compatibility. I'm
> sure it won't take long for AFOLs to cut the leads :-)
>
> Mark
yep you're right. i allready have a few mods planned. i'm going to see if i
can't fit a step motor into a train motor case among other things.
ondrew
| | | | | | | | | | | | | | | | | | | | | | | |
> To interface the PF motors with the NXT, I guess the NXT 9V adapter cables
> are
> the official way to go, since the PF system will have 9V compatibility.
> I'm
> sure it won't take long for AFOLs to cut the leads :-)
>
> Mark
OK, I'm claiming retardism on my part for this next question:
I just don't see the compatibility between PF and 9V, can you elaborate?
-Rob
www.brickmodder.net
| | | | | | | | | | | | | | | | | | | | | | |
Hi Rob,
> OK, I'm claiming retardism on my part for this next question:
>
> I just don't see the compatibility between PF and 9V, can you elaborate?
I can't give too many details at the moment, but there WILL be a compatibility
between both systems, built in the extension cords.
Philo
| | | | | | | | | | | | | | | | | | | | | | |
Will those cords be part of the sets or have to be purchased separately?
linmix
Philippe Hurbain wrote:
> Hi Rob,
>
>
> > OK, I'm claiming retardism on my part for this next question:
> >
> > I just don't see the compatibility between PF and 9V, can you elaborate?
>
>
> I can't give too many details at the moment, but there WILL be a compatibility
> between both systems, built in the extension cords.
>
> Philo
>
>
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.robotics, linmix <linmix@gmail.com> wrote:
> Philippe Hurbain wrote:
> > Hi Rob,
> >
> >
> > > OK, I'm claiming retardism on my part for this next question:
> > >
> > > I just don't see the compatibility between PF and 9V, can you elaborate?
> >
> >
> > I can't give too many details at the moment, but there WILL be a compatibility
> > between both systems, built in the extension cords.
> >
> > Philo
> >
> >
> Will those cords be part of the sets or have to be purchased separately?
>
> linmix
AFAIK they will not be in the 2007 ferris wheel, dinosaur or bulldozer kits. I
don't have any news about a release date, nor about a place to purchase them. I
eagerly await developments and will let you know as soon as the information is
released.
Mark
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.robotics, Mark Bellis wrote:
> In lugnet.robotics, linmix <linmix@gmail.com> wrote:
> > Philippe Hurbain wrote:
> > > Hi Rob,
> > >
> > >
> > > > OK, I'm claiming retardism on my part for this next question:
> > > >
> > > > I just don't see the compatibility between PF and 9V, can you elaborate?
> > >
> > >
> > > I can't give too many details at the moment, but there WILL be a compatibility
> > > between both systems, built in the extension cords.
> > >
> > > Philo
> > >
> > >
> > Will those cords be part of the sets or have to be purchased separately?
> >
> > linmix
>
> AFAIK they will not be in the 2007 ferris wheel, dinosaur or bulldozer kits. I
> don't have any news about a release date, nor about a place to purchase them. I
> eagerly await developments and will let you know as soon as the information is
> released.
>
> Mark
Hey mark have you got any new info?
I just noticed that the bulldozer is out through S@H and want to know if the
adapters will be available there too. More importantly when. The official launch
date is just a few weeks away so surely it can't matter now.
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.robotics, Tommy Eriksson wrote:
> Hey mark have you got any new info?
>
> I just noticed that the bulldozer is out through S@H and want to know if the
> adapters will be available there too. More importantly when. The official launch
> date is just a few weeks away so surely it can't matter now.
Looks like i can answer my own question. According to the faq at customer
support the adapters will be out September 1st just like the bulldozer which all
ready is out. :) Good to know that it'll come out so soon.
I should point out that the email address in my posts is old. I've selected that
the adress should be hidden yet an old one appears. Will look into it.
| | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Mark Bellis wrote:
>
> OK, here's a few while you wait :-)
>
> Basic system as used in the creator dinosaur set 4958 (inc handset & battery
> box):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_basic_system_for_dinosaur.jpg
>
> RC IR receiver:
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_front.jpg
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_ir_rx_rear.jpg
>
> Large motor (inc plug top):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_large_motor.jpg
>
> Medium motor (inc stud recesses on bottom and plug bottom):
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor.jpg
> http://www.brickshelf.com/gallery/mbellis/Technic/Power-Functions/pf_medium_motor_bottom.jpg
>
> Mark
Man, I'm excited. A few design flaws I can't understand though:
Why the cable nub coming out of the cable's brick? There has to have been a way
to avoid that.
On the large motor, why all that wasted space on the drkGry part that could have
pin holes? Also, I wouldn't say no to a wege-belt wheel pin-hole layout, for
the half-stud offset. Other than that, it looks good :D
On the small motor, it seems you would always need the pins on the front for a
strong connection, but oh well.
Looks good!
--Peter
| | | | | | |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}