| |
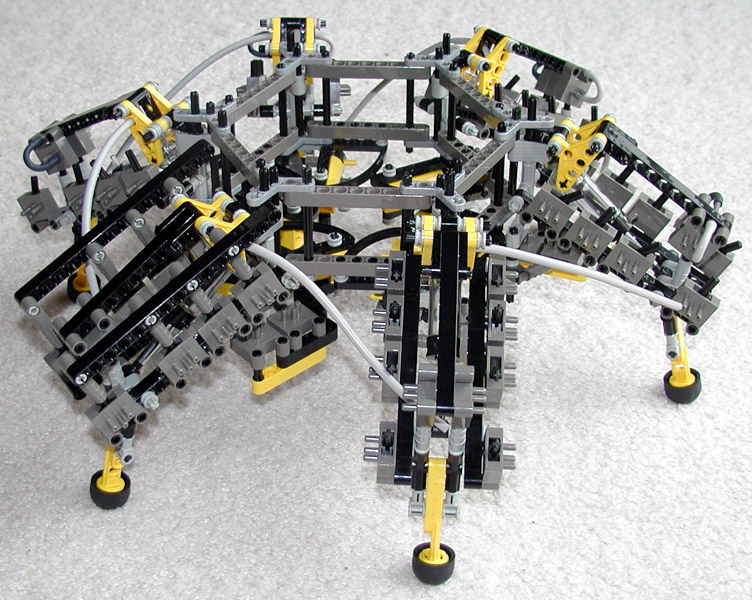
I pleased to announce my newest pneumatic walker, hex363.
http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
http://www.kclague.net/hex363/hex363.MOV
Hex363 is similar in pneumatic circuit design to Quad242
(http://www.kclague.net/Quad242/index.htm)
Hex363 is completely pneumatic. Hex363 is a pneumatic sequencer that can walk
forward. Each leg can extend to the ground, or contract to lift itself off the
ground. It does this using a single large piston and two pneumatic switches.
Each leg can sweep right and left using a single large piston and two switches.
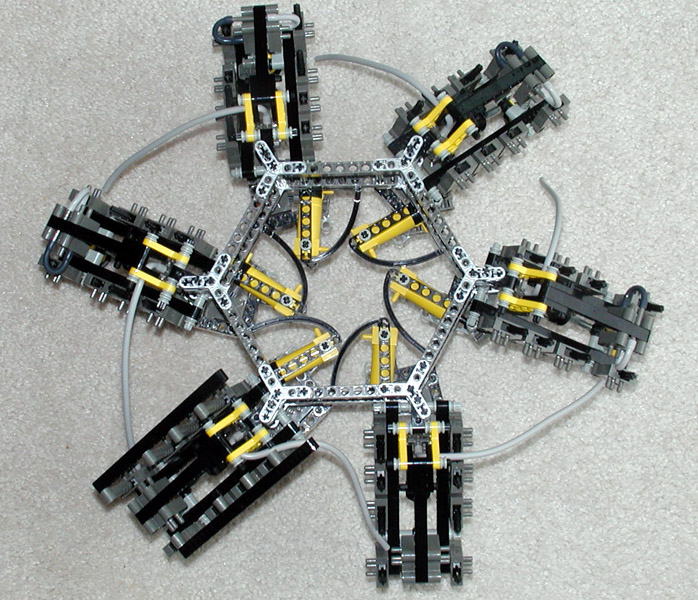
Hex363's six legs are split into two groups of three legs. When a given
group's three legs are extended to touch the ground, the footprint of those feet
form a triangle. The center of gravity of hex363 always stays within the
triangles formed by the down feet. This allows hex363 to have very small feet.
As hex363 walks it either has one or both feet groups on the ground at a time.
When hex363 wants to transfer weight from one foot group to the other, it places
all six feet on the ground, and then lifts the feet that are not to be weight
bearing. Once three of the feet are retracted, it sweeps all six hips
horizontally to take a step. Hex363 then places all six feet on the ground, and
transfer's weight to the other three feet by lifting the legs that were weight
bearing. Once the feet are retracted, it sweeps the hips horizontally to
complete a stride. Once the hip sweep is complete, hex363 puts all six feet on
the ground. It repeats the above pattern over and over to walk forwards.
Hex363 contains a total of 12 large pistons, four small pistons, and 26
pneumatic switches.
I had shown images of hex363 in the past, but until today it did not walk
correctly. I finally figured out what was wrong, rewired the foot sweep portion
of the circuit and it walked forward.
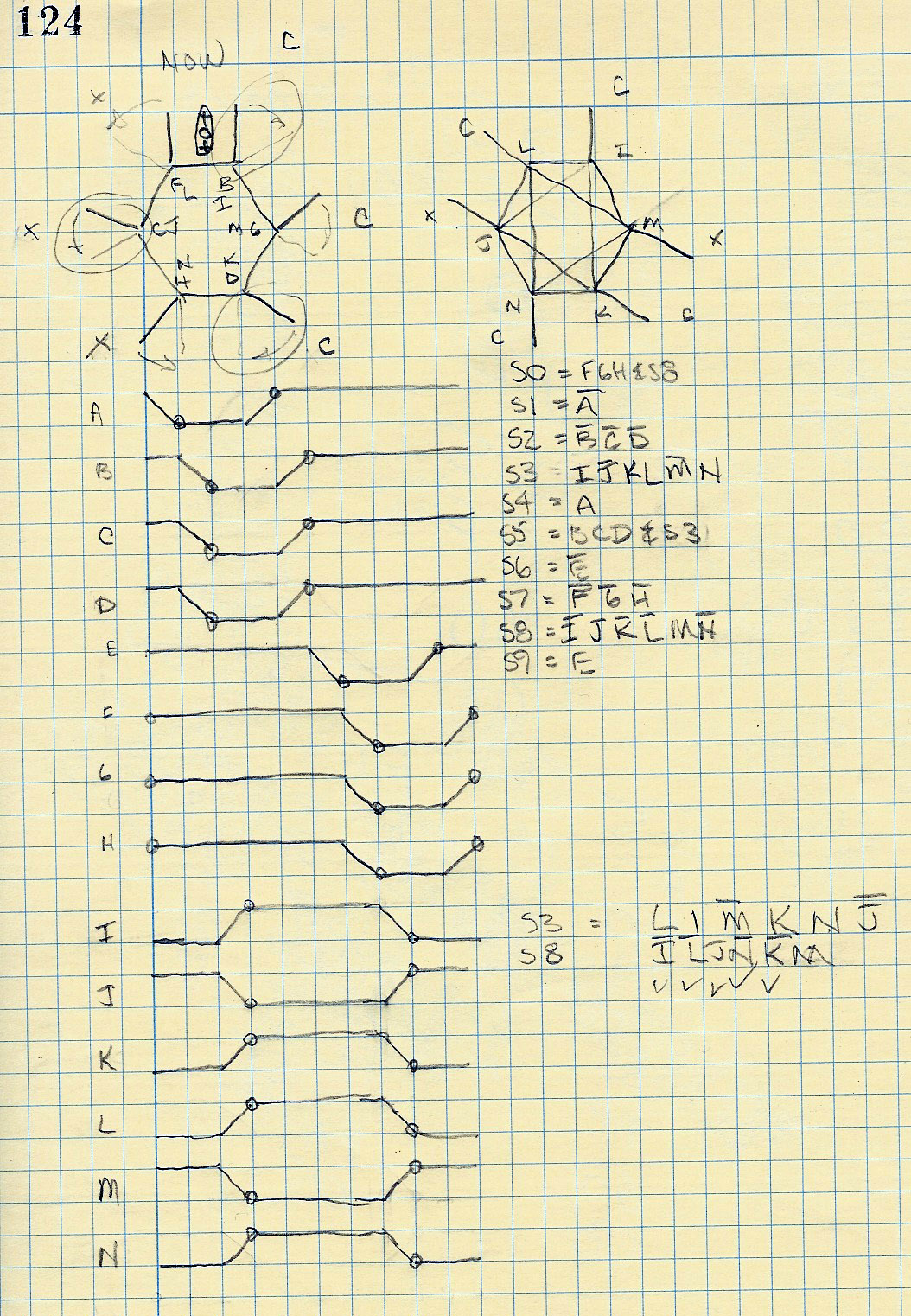
Timing diagram and circuit description is described rather tersly in this
image http://www.brickshelf.com/gallery/kclague/phd/circuit.jpg
hex363 is the most complicated pneumatic design I've ever created.
PLMKWYT,
Kevin
|
|
| |
In lugnet.technic, Kevin L. Clague wrote:
> I pleased to announce my newest pneumatic walker, hex363.
>
> http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
>
> http://www.kclague.net/hex363/hex363.MOV
>
> Hex363 is similar in pneumatic circuit design to Quad242
> (http://www.kclague.net/Quad242/index.htm)
[snip]
> hex363 is the most complicated pneumatic design I've ever created.
>
> PLMKWYT,
I think you're a very scary man, Kevin.
That walker is absolutely *brilliant*. I don't normally
check out the .technic or .robotics side of things, but
today I'm very glad I did. That is absolutely incredible--
and not least of the achievements is keeping it looking so
very nice. The design is very sound--how robust is it?
Have you tried getting it to bear a load on its back (as
the triangular foot groups and internal center of gravity
might allow)? It seems like it would be very sure-footed
generally. How does it handle inclines or obstacles?
Just wow. Wow.
all best
LFB
|
|
| |
In lugnet.technic, Lindsay Frederick Braun wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I pleased to announce my newest pneumatic walker, hex363.
> >
> > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
> >
> > http://www.kclague.net/hex363/hex363.MOV
> >
> > Hex363 is similar in pneumatic circuit design to Quad242
> > (http://www.kclague.net/Quad242/index.htm)
>
>
> [snip]
>
> > hex363 is the most complicated pneumatic design I've ever created.
> >
> > PLMKWYT,
>
> I think you're a very scary man, Kevin.
Lindsay,
Thanks, I think. LOL!
>
> That walker is absolutely *brilliant*. I don't normally
> check out the .technic or .robotics side of things, but
> today I'm very glad I did. That is absolutely incredible--
> and not least of the achievements is keeping it looking so
> very nice. The design is very sound--how robust is it?
> Have you tried getting it to bear a load on its back (as
> the triangular foot groups and internal center of gravity
> might allow)? It seems like it would be very sure-footed
> generally. How does it handle inclines or obstacles?
>
> Just wow. Wow.
Thanks very much! The vertical strength of the legs is quite robust. Plenty of
force and good leverage to hold weight. The weakness in the design is the
structural stability associated with the leg sweeping. There seems to be a lot
of twisting happening leading to the leg not remaining vertical through the
weight bearing leg sweep. I suspect that this twisting would be made worse with
more weight. I would like to make it structurally robust enough to hold an RCX,
three motors, and a pneumatic compressor.
I'm sure it would do fine on mild inclines. But as the inclines get steeper,
the twisting of the legs will be a problem. I'll have to try some obstacles,
but I imagine it should do well. Possibly a suspension would help even more
with obstacles (allowing feet to touch even when other feet are higher off the
ground due to obstacles.
Hex363 is the first phase of a two phase project. As soon as I receive my
bricklink order that has more pneumatic switches, I'll start phase two of the
project.
>
> all best
>
> LFB
Thanks, I appreciate the input.
Kevin
|
|
| |
Amazing, Stunning, Fantastic, Spectacular........
None of these do this creation justice Kevin! That is by far the most
complicated Lego creation I have ever seen! Makes me want to go out and buy
10 backhoe sets. :)
So, when will the K.C. Mastering Lego Pneumatics Handbook be coming out?
Pre-order my copy today. :)
Greg
"Kevin L. Clague" <kevin_clague@yahoo.com> wrote in message
news:Huy3E9.1G57@lugnet.com...
> I pleased to announce my newest pneumatic walker, hex363.
>
> http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
>
> http://www.kclague.net/hex363/hex363.MOV
>
> Hex363 is similar in pneumatic circuit design to Quad242
> (http://www.kclague.net/Quad242/index.htm)
>
> Hex363 is completely pneumatic. Hex363 is a pneumatic sequencer that • can walk
> forward. Each leg can extend to the ground, or contract to lift itself • off the
> ground. It does this using a single large piston and two pneumatic • switches.
> Each leg can sweep right and left using a single large piston and two • switches.
>
> Hex363's six legs are split into two groups of three legs. When a given
> group's three legs are extended to touch the ground, the footprint of • those feet
> form a triangle. The center of gravity of hex363 always stays within the
> triangles formed by the down feet. This allows hex363 to have very small • feet.
>
> As hex363 walks it either has one or both feet groups on the ground at a • time.
> When hex363 wants to transfer weight from one foot group to the other, it • places
> all six feet on the ground, and then lifts the feet that are not to be • weight
> bearing. Once three of the feet are retracted, it sweeps all six hips
> horizontally to take a step. Hex363 then places all six feet on the • ground, and
> transfer's weight to the other three feet by lifting the legs that were • weight
> bearing. Once the feet are retracted, it sweeps the hips horizontally to
> complete a stride. Once the hip sweep is complete, hex363 puts all six • feet on
> the ground. It repeats the above pattern over and over to walk forwards.
>
> Hex363 contains a total of 12 large pistons, four small pistons, and 26
> pneumatic switches.
>
> I had shown images of hex363 in the past, but until today it did not • walk
> correctly. I finally figured out what was wrong, rewired the foot sweep • portion
> of the circuit and it walked forward.
>
> Timing diagram and circuit description is described rather tersly in • this
> image http://www.brickshelf.com/gallery/kclague/phd/circuit.jpg
>
> hex363 is the most complicated pneumatic design I've ever created.
>
> PLMKWYT,
>
> Kevin
|
|
| |
In lugnet.technic, Thomas Avery wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I pleased to announce my newest pneumatic walker, hex363.
> >
> > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
>
> That is awesome! It's very complex and impressive to see. And then it moves!!!
> Great creation, Kevin.
Thanks TJ!
>
> Any chance for a Ldraw file of the beast? ;-)
Now that you've asked there is a much higher probability of an MPD for this
beast! ;^)
Needless to say, phase two of this beast will be able to walk backwards, turn
and *much* more. There is a very important reason why the body is hexagonal,
not rectangular..... besides the fact that it looks more ogranic this way.
>
> <snip>
> > hex363 is the most complicated pneumatic design I've ever created.
>
> And light years beyond what us mere mortals can fumble together with pneumatics
> :-)
:^)
>
> -TJ
Kevin
|
|
| |
omg, wow and whoa, I'm trying to follow all the lines!
But I can't!
errrhmmm, I want to hear all of it's 'whishing sounds as the pistons expand and
contract, IRL.
jeesh man, that is great.
So, you applied many useful techniques you developed and found the design paths
as you went along or did you start on a new technique, including the valave
control sequences? Is it an expansion on current pnemo king tech, or did you get
to create a new expound based upon a new idea in control?
Just making talk, I think its facinating.
Great hex.
e
|
|
| |
In lugnet.technic, Eric Sophie wrote:
> omg, wow and whoa, I'm trying to follow all the lines!
>
> But I can't!
>
> errrhmmm, I want to hear all of it's 'whishing sounds as the pistons expand and
> contract, IRL.
The movie has sound..... mostly what you hear is all the pumping of the three
large pumps.
>
> jeesh man, that is great.
Thanks!
> So, you applied many useful techniques you developed and found the design paths
> as you went along or did you start on a new technique, including the valave
> control sequences? Is it an expansion on current pnemo king tech, or did you get
> to create a new expound based upon a new idea in control?
This is the third design based on the design methodology I figured out about 9
months ago. Hex363 is an extension of the circuit used for Quad242, the only
significant change is the addition of two more legs, I guess that makes it an
expansion on the current Pneumo-king-tech.
The next phase called Pneumatic Hexapod omni-Directional (PHD) will be even
cooler. The changes will be similar to the changes to Quad242, that allowed it
to walk backwards and turn right and left. I will be adding two pneumatic
polarity reversors for each leg, allowing me to reverse the sweep direction on
each of the legs individually.
One of my long term goals has been to make a Daddy Long Legs spider. I think
I'm getting very close.
>
> Just making talk, I think its facinating.
>
> Great hex.
Thanks Eric! When I grow up I want to be able to design creatures that look
cool like your mechs, *and* have them animated like my creatures.
>
> e
Kevin
|
|
| |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Eric Sophie wrote:
> > omg, wow and whoa, >> So, you applied many useful techniques you developed and found the design paths
> > as you went along or did you start on a new technique, including the valave
> > control sequences? Is it an expansion on current pnemo king tech, or did you get
> > to create a new expound based upon a new idea in control?
>
> This is the third design based on the design methodology I figured out about 9
> months ago. Hex363 is an extension of the circuit used for Quad242, the only
> significant change is the addition of two more legs, I guess that makes it an
> expansion on the current Pneumo-king-tech.
Yay I knew it! More coolness brings more coolness.
> The next phase called Pneumatic Hexapod omni-Directional (PHD) will be even
> cooler. The changes will be similar to the changes to Quad242, that allowed it
> to walk backwards and turn right and left. I will be adding two pneumatic
> polarity reversors for each leg, allowing me to reverse the sweep direction on
> each of the legs individually.
Egads man! That is magnificent!
>
> One of my long term goals has been to make a Daddy Long Legs spider. I think
> I'm getting very close.
Oooh Oooh can I make the coverings? for the body and and and and....
We could have standard connections like the Moonbase Project and call it the
Sophie-Clague connection. You build the Armature then I detail it. Before it
over loads from weight, I play and test it.
:)
> >
> > Just making talk, I think its facinating.
> >
> > Great hex.
>
> Thanks Eric! When I grow up I want to be able to design creatures that look
> cool like your mechs, *and* have them animated like my creatures.
Let's make a Scorpion! I'll cover the Brick! You do the Pnemo for the Arms a
tail. Or if I restrain myself we'll keep it smallish and you can do the legs
too, I'll just build the sub frame, then you install the accutators then I do
the final detail.
> >
> > e
>
> Kevin
e
|
|
| |
In lugnet.technic, Eric Sophie wrote:
<snip>
> > The next phase called Pneumatic Hexapod omni-Directional (PHD) will be even
> > cooler. The changes will be similar to the changes to Quad242, that allowed it
> > to walk backwards and turn right and left. I will be adding two pneumatic
> > polarity reversors for each leg, allowing me to reverse the sweep direction on
> > each of the legs individually.
>
> Egads man! That is magnificent!
Thanks!
> > One of my long term goals has been to make a Daddy Long Legs spider. I think
> > I'm getting very close.
>
> Oooh Oooh can I make the coverings? for the body and and and and....
> We could have standard connections like the Moonbase Project and call it the
> Sophie-Clague connection. You build the Armature then I detail it. Before it
> over loads from weight, I play and test it.
>
> :)
Most certainly! I'd love to do that!
> > > Just making talk, I think its facinating.
> > >
> > > Great hex.
> >
> > Thanks Eric! When I grow up I want to be able to design creatures that look
> > cool like your mechs, *and* have them animated like my creatures.
>
> Let's make a Scorpion! I'll cover the Brick! You do the Pnemo for the Arms a
> tail. Or if I restrain myself we'll keep it smallish and you can do the legs
> too, I'll just build the sub frame, then you install the accutators then I do
> the final detail.
Awesome! Sounds like great fun!
> e
Kevin
|
|
| |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Thomas Avery wrote:
> Thanks TJ!
> > Any chance for a Ldraw file of the beast? ;-)
>
> Now that you've asked there is a much higher probability of an MPD for this
> beast! ;^)
>
> Needless to say, phase two of this beast will be able to walk backwards, turn
> and *much* more. There is a very important reason why the body is hexagonal,
> not rectangular..... besides the fact that it looks more ogranic this way.
Cool. Looking forward to that!
Any plans for the Octa484? :-)
-TJ
|
|
| |
In lugnet.technic, Thomas Avery wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > In lugnet.technic, Thomas Avery wrote:
> > Thanks TJ!
> > > Any chance for a Ldraw file of the beast? ;-)
> >
> > Now that you've asked there is a much higher probability of an MPD for this
> > beast! ;^)
> >
> > Needless to say, phase two of this beast will be able to walk backwards, turn
> > and *much* more. There is a very important reason why the body is hexagonal,
> > not rectangular..... besides the fact that it looks more ogranic this way.
>
> Cool. Looking forward to that!
The fixed shape parts are easy. It is all the pneumatic tubes that are a pain
to route.
>
> Any plans for the Octa484? :-)
You *know* the answer to this one!
>
> -TJ
Kevin
|
|
| |
In lugnet.technic, Lindsay Frederick Braun wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I pleased to announce my newest pneumatic walker, hex363.
> >
> > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
> >
> > http://www.kclague.net/hex363/hex363.MOV
> >
> > Hex363 is similar in pneumatic circuit design to Quad242
> > (http://www.kclague.net/Quad242/index.htm)
<snip>
> That walker is absolutely *brilliant*. I don't normally
> check out the .technic or .robotics side of things, but
> today I'm very glad I did. That is absolutely incredible--
> and not least of the achievements is keeping it looking so
> very nice. The design is very sound--how robust is it?
> Have you tried getting it to bear a load on its back (as
> the triangular foot groups and internal center of gravity
> might allow)? It seems like it would be very sure-footed
> generally. How does it handle inclines or obstacles?
>
> Just wow. Wow.
I did some test driving and it was not very robust.
I tried to have it walk over an upside-down cake pan. It fell back on a
triangle made of two feet from one group, and one foot from the other (this one
was retracted.) I didn't bother to find out what amount of elevation was OK. I
also tried it on what I considered a very reasonable include, and it fell over.
I attribute this lack of robustness due to high center of gravity, and lack of
rigidity in the leg extension/retraction mechanism.
I figured out how to place the hip pistons on the under side of the frame,
lowering the center of gravity. Now the body looks like an empty hexagonal box.
Room enough for a couple of RCX's I suppose.
http://www.brickshelf.com/gallery/kclague/PhD-Mark-2/p3270027.jpg
Obviously the pneumatics are not hooked, up, but the structure is sound and
compact.
I like the symmetry this new design gives:
http://www.brickshelf.com/gallery/kclague/PhD-Mark-2/p3270029.jpg
I've also added the pneumatic switches needed for the next version called PhD
(Pneumatic Hexapod omni-Directional).
>
> all best
>
> LFB
Once I get it walking, I'll check its robustness. Hopefully the lower center of
gravity will increase robustness.
Kevin
|
|
| |
In lugnet.technic, Thomas Avery wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I pleased to announce my newest pneumatic walker, hex363.
> >
> > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
>
> That is awesome! It's very complex and impressive to see. And then it moves!!!
> Great creation, Kevin.
>
> Any chance for a Ldraw file of the beast? ;-)
I have created a web page for hex363, pretty scant, but it communicates what is
needed. Included in the page is a link to hex363.mpd. It does not contain the
pneumatic hookups needed to make it walk. Sorry that was too much work.
The final version will be fully documented including pneumatic hoses.
> <snip>
> > hex363 is the most complicated pneumatic design I've ever created.
>
> And light years beyond what us mere mortals can fumble together with pneumatics
> :-)
>
> -TJ
Kevin
|
|
| |
hi kevin,
i must first say that this is just amazing work!
is that 12 new switches on each leg? that's going to take a lot of
bricklink orders to get enough switches.
i'm was wondering where to find p_swtch.dat, p_lcyl.dat, and p_larm.dat. i
can't seem to find these on ldraw.org. your hex363.mpd file is looking for
these.
thanks,
bob
At 06:06 PM 3/30/2004 +0000, you wrote:
> In lugnet.technic, Thomas Avery wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > > I pleased to announce my newest pneumatic walker, hex363.
> > >
> > > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
> >
> > That is awesome! It's very complex and impressive to see. And then it • moves!!!
> > Great creation, Kevin.
> >
> > Any chance for a Ldraw file of the beast? ;-)
>
>
> I have created a web page for hex363, pretty scant, but it communicates
> what is
> needed. Included in the page is a link to hex363.mpd. It does not
> contain the
> pneumatic hookups needed to make it walk. Sorry that was too much work.
>
> The final version will be fully documented including pneumatic hoses.
>
> > <snip>
> > > hex363 is the most complicated pneumatic design I've ever created.
> >
> > And light years beyond what us mere mortals can fumble together with • pneumatics
> > :-)
> >
> > -TJ
>
> Kevin
Bob Kojima
ko@fial.com
Fial Incorporated
Telecom Monitoring Solutions
4343 SW Corbett Ave
Portland, OR 97239
503.227.7083
http://www.fial.com
|
|
| |
In lugnet.technic, Bob Kojima wrote:
> hi kevin,
>
> i must first say that this is just amazing work!
Thanks Bob. To my knowlege, you have recreated more of MOC's than anyone else.
I see your work on brickshelf.
>
> is that 12 new switches on each leg? that's going to take a lot of
> bricklink orders to get enough switches.
In PhD, there are 8 new switches per hip, making a total of 12 switches per leg.
The grand total is 74 pneumatic switches, 12 large dual ported pistons, and 4
small dual ported pistons.
The eight new switches create four pneumatic multiplexors. Two muxes are
combined into 1 polarity reversor. One reversor is used to reverse the sweep of
the leg (via the hip piston). The other reversor is used to swap the outputs of
the two switches that instrument the hip sweep.
PhD is not for the small of checking account I guess.
PhD will cost you eleven 8455 backhoes. Gack! That is $1,100....... I suggest
using bricklink instead.
>
> i'm was wondering where to find p_swtch.dat, p_lcyl.dat, and p_larm.dat. i
> can't seem to find these on ldraw.org. your hex363.mpd file is looking for
> these.
Thanks for the nudge Bob. I've added these parts to the MPD file and uploaded
it again as:
http://www.kclague.net/hex363/h3x363.mpd
Kevin
>
>
>
> thanks,
>
> bob
> At 06:06 PM 3/30/2004 +0000, you wrote:
> > In lugnet.technic, Thomas Avery wrote:
> > > In lugnet.technic, Kevin L. Clague wrote:
> > > > I pleased to announce my newest pneumatic walker, hex363.
> > > >
> > > > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > > > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
> > >
> > > That is awesome! It's very complex and impressive to see. And then it moves!!!
> > > Great creation, Kevin.
> > >
> > > Any chance for a Ldraw file of the beast? ;-)
> >
> >
> > I have created a web page for hex363, pretty scant, but it communicates
> > what is
> > needed. Included in the page is a link to hex363.mpd. It does not
> > contain the
> > pneumatic hookups needed to make it walk. Sorry that was too much work.
> >
> > The final version will be fully documented including pneumatic hoses.
> >
> > > <snip>
> > > > hex363 is the most complicated pneumatic design I've ever created.
> > >
> > > And light years beyond what us mere mortals can fumble together with pneumatics
> > > :-)
> > >
> > > -TJ
> >
> > Kevin
>
>
>
>
>
> Bob Kojima
> ko@fial.com
>
> Fial Incorporated
> Telecom Monitoring Solutions
> 4343 SW Corbett Ave
> Portland, OR 97239
> 503.227.7083
> http://www.fial.com
|
|
| |
At 07:55 PM 3/30/2004 +0000, you wrote:
> In lugnet.technic, Bob Kojima wrote:
> > hi kevin,
> >
> > i must first say that this is just amazing work!
>
> Thanks Bob. To my knowlege, you have recreated more of MOC's than anyone
> else.
> I see your work on brickshelf.
well thank you for posting such great pictures and descriptions. your
pnuematic creations are so fun to make and to figure out how they
work. i'm currently working on making your inchworm. i'm waiting for more
of the new switches from a bricklink order. i have made your
Asynchropillar already. it looks like Asynchropillar and inchworm both use
the same pneumatic hookups.
> In PhD, there are 8 new switches per hip, making a total of 12 switches
> per leg.
> The grand total is 74 pneumatic switches, 12 large dual ported pistons, and 4
> small dual ported pistons.
i have enough pistons. but 74 of the new switches? i'm hopping to find a
few more switches so i can make your hex363 but i can only dream about
making you PhD. i can't wait to see the finished pictures of it and a few
movies. have you figured out how many pneumatic T pieces it's going to
take. i can't even imaging how much hose you are going to need.
> Thanks for the nudge Bob. I've added these parts to the MPD file and uploaded
> it again as:
mlcad is still looking for: p_swtchb.dat, p-nozzle.dat, and
p_lbase.dat but i can see enough to figure out what goes where. it's just
kind of weird seeing only part of a piston.
bob
Bob Kojima
ko@fial.com
Fial Incorporated
Telecom Monitoring Solutions
4343 SW Corbett Ave
Portland, OR 97239
503.227.7083
http://www.fial.com
|
|
| |
In lugnet.technic, Bob Kojima wrote:
> At 07:55 PM 3/30/2004 +0000, you wrote:
> > In lugnet.technic, Bob Kojima wrote:
> > > hi kevin,
> > >
> > > i must first say that this is just amazing work!
> >
> > Thanks Bob. To my knowlege, you have recreated more of MOC's than anyone
> > else.
> > I see your work on brickshelf.
>
>
> well thank you for posting such great pictures and descriptions. your
> pnuematic creations are so fun to make and to figure out how they
> work. i'm currently working on making your inchworm. i'm waiting for more
> of the new switches from a bricklink order. i have made your
> Asynchropillar already. it looks like Asynchropillar and inchworm both use
> the same pneumatic hookups.
You are welcome. I document in hopes that others will enjoy and learn from
MOC's.
I think you are right about Asynchropillar and Inchworm, although Asynchropillar
is not documented well enough to tell easily. Let me know if you conclude they
are the same.
> > In PhD, there are 8 new switches per hip, making a total of 12 switches
> > per leg.
> > The grand total is 74 pneumatic switches, 12 large dual ported pistons, and 4
> > small dual ported pistons.
>
>
> i have enough pistons. but 74 of the new switches? i'm hopping to find a
> few more switches so i can make your hex363 but i can only dream about
> making you PhD. i can't wait to see the finished pictures of it and a few
> movies. have you figured out how many pneumatic T pieces it's going to
> take. i can't even imaging how much hose you are going to need.
You can start with hex363, and add 16 switches ala Hex363 and make it walk
forward, backward, and turn right, and left. Let me know if you need help
figuring that out.
I do not know how many T's. Not a lot(less than a dozen) I don't think.
> > Thanks for the nudge Bob. I've added these parts to the MPD file and uploaded
> > it again as:
>
>
> mlcad is still looking for: p_swtchb.dat, p-nozzle.dat, and
> p_lbase.dat but i can see enough to figure out what goes where. it's just
> kind of weird seeing only part of a piston.
I've tried it again. Please give it another try.
Kevin
|
|
| |
At 08:48 PM 3/30/2004 +0000, you wrote:
> You can start with hex363, and add 16 switches ala Hex363 and make it walk
> forward, backward, and turn right, and left. Let me know if you need help
> figuring that out.
it will be a while before i start to make hex363. i need to finish
inchworm. i will probably leave it together for a while to show off. and
i will need to order about 10 more switches. when i finally do get started
on hex363 i will probably need to ask you for help. i'm not sure if i will
be able to figure out where all the hose goes just from pictures.
> I do not know how many T's. Not a lot(less than a dozen) I don't think.
your right. i just finished wiring up about 80% of inchworm and it took a
lot of T pieces. but i think that is because of the 3 sets of 3 pistons
that had to be all hooked together. that took 12 T pieces by it self.
> > mlcad is still looking for: p_swtchb.dat, p-nozzle.dat, and
> > p_lbase.dat but i can see enough to figure out what goes where. it's just
> > kind of weird seeing only part of a piston.
>
> I've tried it again. Please give it another try.
it works perfectly now! thanks!
bob
Bob Kojima
ko@fial.com
Fial Incorporated
Telecom Monitoring Solutions
4343 SW Corbett Ave
Portland, OR 97239
503.227.7083
http://www.fial.com
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}