 | | | | | | |
| |

|
Hi All,
I just snapped some pictures of my latest MOC. It is a pneumatic quadraped
that has an advanced walking gait made completely out of lego pneumatics.
Instant walking, just add air pressure.
Quad242's front left and back right legs are paired together, so that they
both move up and down, as well as forward backward at the same time. Quad242's
front right and back left legs are also paired.
My goal with this quad was to make the pneumatics sequence in a way that the
two leg pairs never transition up/down at the same time. Typically, one pair of
legs are weight bearing, and the other pair are off the ground. Quad242
transitions the non-weight bearing legs down to weight bearing, before it takes
the next leg pair off the ground. This means the body of the quad does not
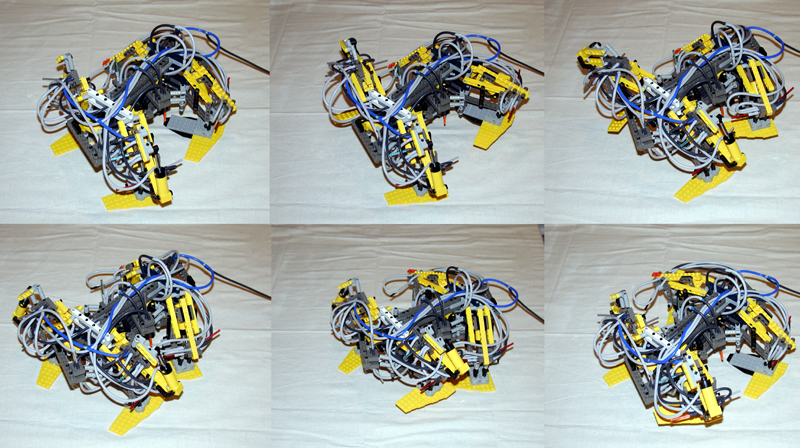
raise and lower as the quad walks. Quad242 uses a six stage sequence to achieve
this walking, as shown in this picture:
http://www.brickshelf.com/gallery/kclague/Quad242/q242-sequence.jpg
Quad242 starts in the upper left hand picture with all four feet on the ground.
The sequence is top row, left to right, and then bottom row left to right. One
Quad242 makes it to the lower right picture, it restarts the sequence in the
upper right picture.
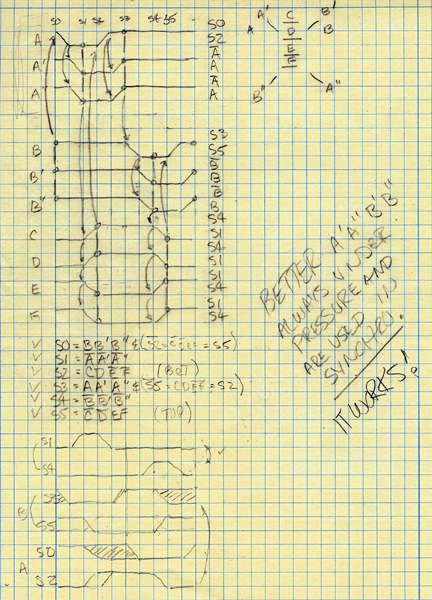
Quad242 is comprised of 10 pistons, and 19 pneumatic switches.
The pneumatic circuit was designed on paper in my LEGO log book. Here is the
page. I'll be describing these rather cryptic drawings on my web site
http://www.users.qwest.net/~kclague very soon.
http://www.brickshelf.com/gallery/kclague/Quad242/quad242-design.jpg
I also have to buy myself a camcorder so I can make movies.
More pictures of Quad242 are available here after moderation:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
PLMKWYT.
Kevin
| | | | | | | | | | | | | | | |
> More pictures of Quad242 are available here after moderation:
>
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
>
> PLMKWYT.
Wow, that's massive!
And a video of at least one cycle would be helpful :)
Why the large footprint?
--
Best regards,
/Tobbe
<http://www.lotek.nu>
(remove SPAM when e-mailing)
| | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Tobbe Arnesson wrote:
> > More pictures of Quad242 are available here after moderation:
> >
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
> >
> > PLMKWYT.
>
> Wow, that's massive!
That happens with large pistons.
>
> And a video of at least one cycle would be helpful :)
I knew you would ask :^)
>
> Why the large footprint?
So it doesn't tip!?! The center of mass is not always in line with the center
of the footprint, so it can tip to one side or the other of the down feet
diagonal.
Also the model is not symmetric because two of the four legs have an extra
piston.
Adding two more legs would make a hexapod, and the feet could be very small.
I've two pneumatic polarity reversers and now it can calk backwards and forwards
with just a flip of a few pneumatic switches.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Tobbe Arnesson wrote:
> I've two pneumatic polarity reversers and now it can calk backwards and forwards
> with just a flip of a few pneumatic switches.
I've added a total of four polarity reversers and now it can walk forward,
backward, and turn right and left (within its own footprint)!
The transistions from turning to walking and walking to turning involves
flipping two of the polarity reversers and manually adjusting two of the legs'
horizontal positions.
I'd like to eliminate the manual adjustment of the legs making it possible to
remotely control the walking/turning adjustments.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Tobbe Arnesson wrote:
> > More pictures of Quad242 are available here after moderation:
> >
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=63133
> >
> > PLMKWYT.
>
> Wow, that's massive!
>
> And a video of at least one cycle would be helpful :)
As you wish:
http://www.brickshelf.com/gallery/kclague/Quad242/q242-forward.mpg
shows Quad242 walking forward.
http://www.brickshelf.com/gallery/kclague/Quad242/q242-left.mpg
shows Quad242 turning left
I've got two more but I'm having trouble uploading them.... I'll let you know
when I get them uploaded.
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
Does anyone know what is going on at BrickShelf with regard to movie files? I
sent email to the webmaster but haven't gotten a reply.
Jona
LEGO Robotics Group of Ann Arbor
http://www.24tooth.com
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Jona Jeffords wrote:
> Does anyone know what is going on at BrickShelf with regard to movie files? I
> sent email to the webmaster but haven't gotten a reply.
Mike Thorn tells us that movies are only available on Brickshelf during low
bandwidth hours.
I'm working on a website that does not depend on Brickshelf to hold my movies.
I hope to have that up in a week.
>
> Jona
> LEGO Robotics Group of Ann Arbor
> http://www.24tooth.com
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Jona Jeffords wrote:
> > Does anyone know what is going on at BrickShelf with regard to movie files? I
> > sent email to the webmaster but haven't gotten a reply.
>
> Mike Thorn tells us that movies are only available on Brickshelf during low
> bandwidth hours.
>
> I'm working on a website that does not depend on Brickshelf to hold my movies.
> I hope to have that up in a week.
>
> >
> > Jona
> > LEGO Robotics Group of Ann Arbor
> > http://www.24tooth.com
>
> Kevin
Thanks. I hadn't heard that yet and I have to say it is dissapointing, but
totally understandable.
Jona
LEGO Robotics Group of Ann Arbor
http://www.24tooth.com
| | | | | | | | | | | | | | | | | | |
I got a new web site with plenty of room, so I've uploaded Quad242 movies.
The website is http://www.kclague.net As usual, my creations are listed in
chronological order, so Quad242 (http://www.kclague.net/Quad242) is at the end
of the creation list. There are movies for walking forward and backward, as
well as turning right and left.
I also spent a lot of time this week writing up a page about pneumatic
sequencers (http://www.kclague.net/Sequencer). It is not done, because I don't
have all the movies finished, but I thought I'd put it up for those who might be
interested.
Kevin
| | | | | | | | | | | | | | | | | | | | | |
Thanks, Kevin, quadraped explanations are very interesting, and you sequencer
paper is a "must read" !!!
Philo
| | | | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Philippe Hurbain wrote:
> Thanks, Kevin, quadraped explanations are very interesting, and you sequencer
> paper is a "must read" !!!
Thanks Philo! So far the feedback on the sequencer paper has been positive.
Now that I've learned enough to write that paper, I'm prepared to make some
really complicated pneumatic circuits. The cornerstone of the sequencer design
methodology is Mark Tarrabain's simple AND gate made of two pneumatic switches
in series. It makes boolean logic so simple.
Using my pneumatic mux, it is simple to make an XOR comparable to Mark's AND
gate (three switches instead of two). This can be used to allow a piston to be
on more than once in a cycle through the sequence. I've not written that up
yet.....
>
> Philo
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
> I got a new web site with plenty of room, so I've uploaded Quad242 movies.
Cool!
Would it benefit from turntables between the feet and legs?
These turntable 2 x 2:
http://peeron.com/inv/parts/3680c01
or these turntable 4 x 4:
http://peeron.com/inv/parts/3403b
Looks like it looses alot of traction, perhaps if the foot could remain more
still it would be better?
--
Best regards,
/Tobbe
<http://www.lotek.nu>
(remove SPAM when e-mailing)
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Tobbe Arnesson wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I got a new web site with plenty of room, so I've uploaded Quad242 movies.
>
> Cool!
Thanks Tobbe!
>
> Would it benefit from turntables between the feet and legs?
>
> These turntable 2 x 2:
> http://peeron.com/inv/parts/3680c01
>
> or these turntable 4 x 4:
> http://peeron.com/inv/parts/3403b
>
> Looks like it looses alot of traction, perhaps if the foot could remain more
> still it would be better?
How would turntables help the design? Right now the whole thing is studless
except for the feet. To use the studly turntables would require major framework
redesign (not that that is a bad thing :^)
You are right it is not very efficient. Quad242 was primarily an excersize in
pneumatic circuit design. Very few walkers ever have their feet have changing
phase relationships. Typically they have static phase differences of 180
degrees (or 90 degrees for some quads). I've used differentials to get dynamic
phase change, but this is my first time for pneumatics.
The current leg design would work better on a hexapod. The feet could be points
on the ground, instead of the big plates. Extending the pneumatics to Hex363
would be (will be) very simple. I've already ordered up a bunch of those rubber
tipped competition arrows for hexapod feet.
Currently the feet have to be as big as they are to compensate for the fact that
there are only two feet on the ground, and that the feet turn with respect to
the diagonal between the feet in a pair. Making the legs longer, so that the
arc length of the horizontal sweep was longer, might improve things a bit. I
think that converting the leg sweep to a vertical plane would help efficiency,
but would reintroduce gravity wells.
Leg design will be an interesting place to focus.
Kevin
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
>
> I also spent a lot of time this week writing up a page about pneumatic
> sequencers (http://www.kclague.net/Sequencer). It is not done, because I don't
> have all the movies finished, but I thought I'd put it up for those who might be
> interested.
Hi Kevin and all,
I wanted to experiment with your sequencers without fussing too much with time
consuming building, so I used simulation...
I used a free electronics simulator, CircuitMaker Student
(http://www.microcode.com/downloads/student.htm). Piston + switch are equivalent
to an RS flip-flop, and you can add tubing (wires...), AND gates and SCOPE
displays. A good tutorial and help file are provided with the program.
Here are two screen captures of two simulated sequencers from your paper:
http://www.brickshelf.com/gallery/Philo/Misc/2pistons.gif
http://www.brickshelf.com/gallery/Philo/Misc/3pistons4switches.gif
Caveats:
- this does not simulate mechanical loading or speed variations between pistons
(perhaps adding delay line can simulate that - not tested)
- it's much more fun to build real sequencers ;o)
Cheers,
Philo
www.philohome.com
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain wrote:
> >
> > I also spent a lot of time this week writing up a page about pneumatic
> > sequencers (http://www.kclague.net/Sequencer). It is not done, because I don't
> > have all the movies finished, but I thought I'd put it up for those who might be
> > interested.
>
> Hi Kevin and all,
>
> I wanted to experiment with your sequencers without fussing too much with time
> consuming building, so I used simulation...
>
> I used a free electronics simulator, CircuitMaker Student
> (http://www.microcode.com/downloads/student.htm). Piston + switch are equivalent
> to an RS flip-flop, and you can add tubing (wires...), AND gates and SCOPE
> displays. A good tutorial and help file are provided with the program.
>
> Here are two screen captures of two simulated sequencers from your paper:
> http://www.brickshelf.com/gallery/Philo/Misc/2pistons.gif
> http://www.brickshelf.com/gallery/Philo/Misc/3pistons4switches.gif
>
> Caveats:
> - this does not simulate mechanical loading or speed variations between pistons
> (perhaps adding delay line can simulate that - not tested)
> - it's much more fun to build real sequencers ;o)
Philo,
Hey! Great stuff!
I've been aware of the electrical equivalence, but not mentioned it.
Maybe if you put capacitors in series at the inputs of each flop, your test
points might have less vertical slope.
I'll probably use the simulator to check out my paper designs.
In the end, my design process assumes all pistons and loads are exactly the
same (makes it easier to draw the graphs.)
I'm very impressed Philo!
Kevin
>
> Cheers,
>
> Philo
> www.philohome.com
| | | | | | | | | | | | | | | | | | | | | | | | | | |
> Philo,
> Hey! Great stuff!
>
> I've been aware of the electrical equivalence, but not mentioned it.
>
> Maybe if you put capacitors in series at the inputs of each flop, your test
> points might have less vertical slope.
To do that you have to use the simulator in analog mode, I'm not sure it would
work on that kind of circuit (and if it did the simulation would be MUCH slower)
Philo
| | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain wrote:
> >
> > I also spent a lot of time this week writing up a page about pneumatic
> > sequencers (http://www.kclague.net/Sequencer). It is not done, because I don't
> > have all the movies finished, but I thought I'd put it up for those who might be
> > interested.
>
> Hi Kevin and all,
>
> I wanted to experiment with your sequencers without fussing too much with time
> consuming building, so I used simulation...
>
> I used a free electronics simulator, CircuitMaker Student
> (http://www.microcode.com/downloads/student.htm). Piston + switch are equivalent
> to an RS flip-flop, and you can add tubing (wires...), AND gates and SCOPE
> displays. A good tutorial and help file are provided with the program.
>
> Here are two screen captures of two simulated sequencers from your paper:
> http://www.brickshelf.com/gallery/Philo/Misc/2pistons.gif
> http://www.brickshelf.com/gallery/Philo/Misc/3pistons4switches.gif
>
> Caveats:
> - this does not simulate mechanical loading or speed variations between pistons
> (perhaps adding delay line can simulate that - not tested)
> - it's much more fun to build real sequencers ;o)
Philo,
Have you seen this?
http://www.kclague.net/pedmatic/schematic.jpg
Looks amazingly like your SR flop schematics.
Kevin
> Cheers,
>
> Philo
> www.philohome.com
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain wrote:
> >
> > I also spent a lot of time this week writing up a page about pneumatic
> > sequencers (http://www.kclague.net/Sequencer). It is not done, because I don't
> > have all the movies finished, but I thought I'd put it up for those who might be
> > interested.
>
> Hi Kevin and all,
>
> I wanted to experiment with your sequencers without fussing too much with time
> consuming building, so I used simulation...
>
> I used a free electronics simulator, CircuitMaker Student
> (http://www.microcode.com/downloads/student.htm). Piston + switch are equivalent
> to an RS flip-flop, and you can add tubing (wires...), AND gates and SCOPE
> displays. A good tutorial and help file are provided with the program.
>
> Here are two screen captures of two simulated sequencers from your paper:
> http://www.brickshelf.com/gallery/Philo/Misc/2pistons.gif
> http://www.brickshelf.com/gallery/Philo/Misc/3pistons4switches.gif
>
> Caveats:
> - this does not simulate mechanical loading or speed variations between pistons
> (perhaps adding delay line can simulate that - not tested)
> - it's much more fun to build real sequencers ;o)
Philo,
I downloaded the tools, and entered the base schematic for Quad242. Quad242
depends on some initial conditions where 4 of the 5 flops have a value of 1.
I've read the docs and not found a way to preset the flops.
Any ideas?
Your choice to model the pistons as SR flops is perfect. With SR's you can
set or reset but not set and reset. Pistons are exactly like that. Pressure at
both ports on the piston provides unpredictable results.
>
> Cheers,
> Philo
> www.philohome.com
Kevin
| | | | | | | | | | | | | | | | | | | | | | |
> I downloaded the tools, and entered the base schematic for Quad242. Quad242
> depends on some initial conditions where 4 of the 5 flops have a value of 1.
> I've read the docs and not found a way to preset the flops.
>
> Any ideas?
>
> Your choice to model the pistons as SR flops is perfect. With SR's you can
> set or reset but not set and reset. Pistons are exactly like that. Pressure at
> both ports on the piston provides unpredictable results.
Hi Kevin,
Here is a simple circuit that also require some initialisation:
http://www.brickshelf.com/gallery/Philo/Misc/simul3.gif
I didn't find the digital equivalent of the .IC (initial condition) used in
analog simulations, but if you use the probe tool (arrow on the screen capture)
and click on a node, you toggle its state.
There may be better ways, but this one works (I'm not that fluent in the use of
CircuitMaker...)
Philo
| | | | | | | | | | | | | | | | | |
In lugnet.technic, Kevin L. Clague wrote:
| |
Hi All,
I just snapped some pictures of my latest MOC. It is a pneumatic quadraped
that has an advanced walking gait made completely out of lego pneumatics.
Instant walking, just add air pressure.
|
Perfect!
| |
Quad242’s front left and back right legs are paired together, so that they
both move up and down, as well as forward backward at the same time.
Quad242’s front right and back left legs are also paired.
|
Way to go!
| |
My goal with this quad was to make the pneumatics sequence in a way that the
two leg pairs never transition up/down at the same time. Typically, one pair
of legs are weight bearing, and the other pair are off the ground. Quad242
transitions the non-weight bearing legs down to weight bearing, before it
takes the next leg pair off the ground. This means the body of the quad does
not raise and lower as the quad walks. Quad242 uses a six stage sequence to
achieve this walking, as shown in this picture
|

Facinating!
| |
Quad242 starts in the upper left hand picture with all four feet on the
ground. The sequence is top row, left to right, and then bottom row left to
right. One Quad242 makes it to the lower right picture, it restarts the
sequence in the upper right picture.
Quad242 is comprised of 10 pistons, and 19 pneumatic switches.
The pneumatic circuit was designed on paper in my LEGO log book. Here is the
page. I’ll be describing these rather cryptic drawings on my web site
http://www.users.qwest.net/~kclague very soon.
|
Intense!
| |
I also have to buy myself a camcorder so I can make movies.
More pictures of Quad242 are available
here
PLMKWYT.
Kevin
|
Can I build a Mecha Sheith for it? An outer skin? Can I can I!
Question: Any entertainment for a Tail of some sort to study the effect during
articulation?
Nice work.
e

| | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
| |
Hi All,
I just snapped some pictures of my latest MOC. It is a pneumatic
quadraped that has an advanced walking gait made completely out of lego
pneumatics. Instant walking, just add air pressure.
|
Perfect!
|
Thanks Eric!
| |
Can I build a Mecha Sheith for it? An outer skin? Can I can I!
|
Sure!
| |
Question: Any entertainment for a Tail of some sort to study the effect
during articulation?
|
I just ordered up 20 small pistons to make one that is faster.
I should add head and tail. I wonder if a tail and a head can be articulated so
I can reduce foot side.
Thanks Eric.
| |
e
|
Very cool Eric!
Kevin
| | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
| |
In lugnet.technic, Kevin L. Clague wrote:
|
snip
| |
Can I build a Mecha Sheith for it? An outer skin? Can I can I!
Question: Any entertainment for a Tail of some sort to study the effect
during articulation?
|
I started working on articulated head and tail. Quad242 has a very large
footprint, and walks inefficiently.
One of the reasons for large feet is center of gravity. The center of gravity on
Quad242 is just a little behind the center of the body (because of the two extra
pistons on the back.) When two feet are down, the feet form a folcrum that
Quad242 has to balance on. A diagonal drawn between the two down feet does not
intersect the center of gravity, so the feet have to be big enough to cover the
center of gravity.
Articulated head and tail will help move the center of gravity closer to the
folcrum. The head and tail will be able to move forward and back, as well as
side to side. By proper placement of head and tail when two feet are down I
might be able to get the center of gravity onto the folcrum with much smaller
feet.
The head/tail will have to move forward/backward twice each cycle (once for each
down pair of feet), so this has made me enhance my sequential design techniques.
It looks good on paper, but I’ve yet to build the prototype circuit. I’ll
update my sequencial design page if (when) it works.)
It is probably time to break out the artistic part of my creative brain and make
it look like some cool creature. The current structure makes me think of a
komodo dragon or some large lumbering dinosaur. We’ll see after I prototype a
head and a tail.
| |
Nice work.
e
|
As always, your designs are beautiful. I will attempt to acheive this scale of
beauty.
Dare I ask how many RCXs, sensors, motors, pistons and switches your hexapod
contains? It looks like a lot of stuff.
Quad242 uses 10 pistons and about 20 switches. 2 switches per piston seems
typical for my self synchronizing sequential designs.
I just ordered 24 small pistons from PITSCO ($11 for small piston, small pump
and 3 hoses). Merry Christmas to me! I plan on making a smaller and faster
quad242. I might have to get some more small pistons for head and tail.
Kevin
| | | | | | |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}