Subject:
|
Re: SSC: Re: Classic timing circuits and XOR gates (long)
|
Newsgroups:
|
lugnet.technic
|
Date:
|
Tue, 9 Aug 2005 21:41:38 GMT
|
Viewed:
|
5632 times
|
| |

|
|
In lugnet.technic, Steve Hassenplug wrote:
> On Tue, August 9, 2005 3:10 pm, Kevin L. Clague wrote:
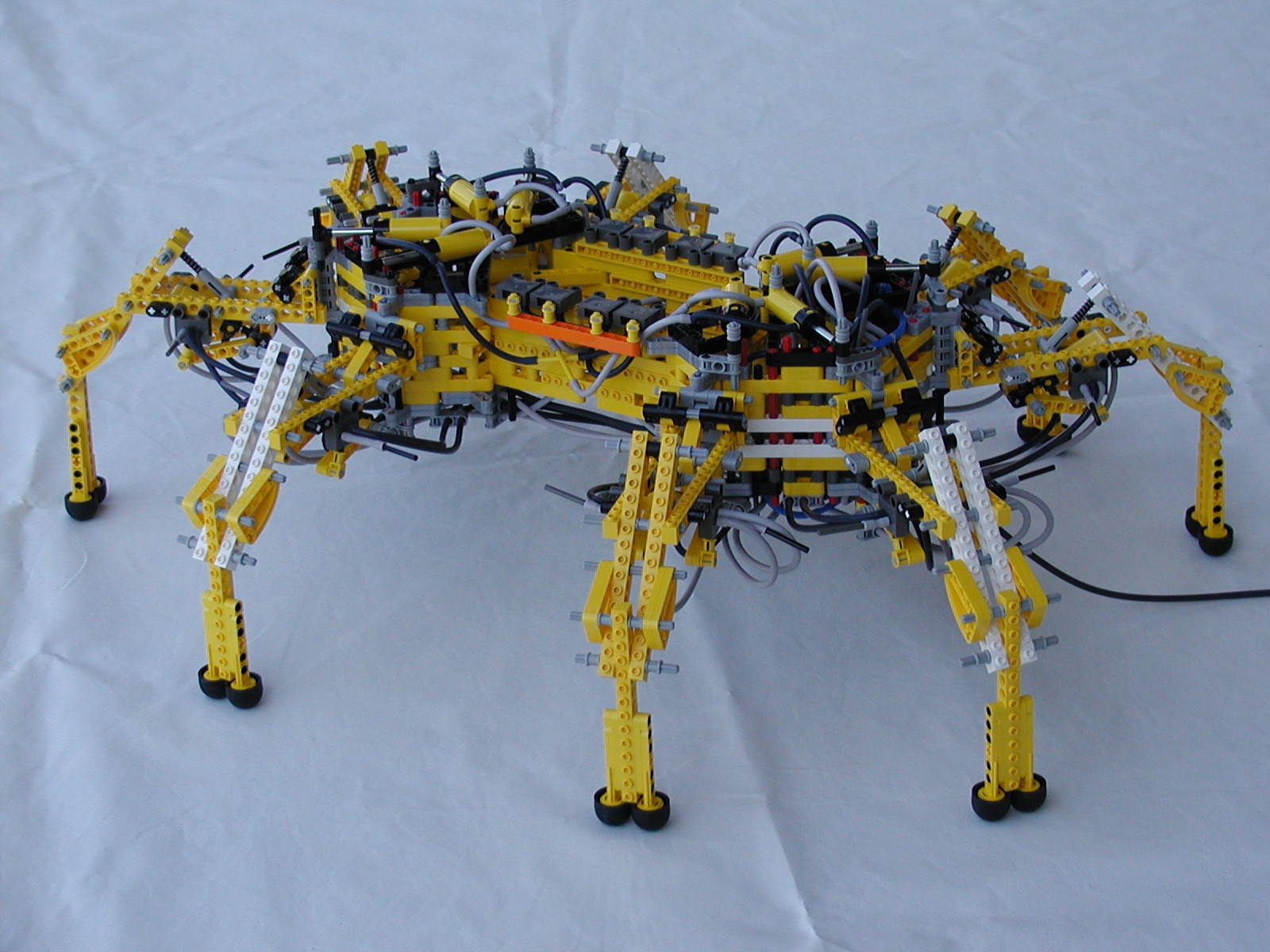
> > Here is a picture of SSC1
> >
> > http://www.brickshelf.com/gallery/kclague/SSClagorpion1/p8040144.jpg
> >
> > SSClagorpion 1 has eight legs broken into two groups of four.
>
> I don't care what Eric says. This is pretty just like it is. :)
>
> (sorry to stray from pneumatics)
>
> It looks like a totally studless design. (some of the beams used are studded, but
> could be replaced with studless) Is that correct? I don't see any plates, just
> beams.
No plates, but the studded beams are chosen for the superior strength they
provide.
>
> Do all the legs have the same sweep?
No, and this is a problem. SSClagorpion 2 will have all the legs have the same
sweep, *but* the body will not be rectangular. I've been trying to avoid
rectangular, because it doesn't look very organic.
>
> Do the shocks compress much when it walks?
Well, it was walking very slowly because the body was stretching and twisting.
This led to the gravity well I was trying to avoid in the first place. To make
leg drop and lift go faster, I added a second set of pistons. Nothing is for
free, so the body twisted more. The front and back legs completely compressed
their shocks, and one end would fall to the ground.....
I replaced the shocks on the end legs with 1x7 straight liftarms. Tis helped a
lot.
I also braced the body up *some* and this helped.
This is at least three times as big as anything I've ever created, so there are
a lot of structural support issues. I *hated* static stresses and strains in
college, but now *need* to be good at them... LOL
With the extra weight of the pistons, and extra pieces needed to add them, the
sweep pistons didn't have enough strength to move forward. I had to double up
the sweep pistons too! Four pistons per leg (32 plus 4 timing pistons!) Wish I
had bout about 10 more 8455's before they ran out of stock!
I have to start over with a new body that is structurally sound *first*, and
allows symmetric sweep.
Next I have to modify the leg design so that the legs don't deform as easily
when sweeping from front to back. Right now, all the torque goes through one
poor little axle. Not good. Hey, whaddaya want for a couple weeks work?!?!
This is not really true, because I did a bunch of experiments throughout the
year to make it this far.
On the next version, when the legs sweep symmetrically, it might be good to use
shocks to allow the legs to bow in. The feet sweep out an arc, and in doing so,
they fight each other a little bit. Shocks might let the legs bow and reduce
the fighting.
But..... I doing better than last year where I had nothing to show with respect
to SSClagorpion.
>
> So many questions. I'm looking forward to seeing it at BF.
>
> Steve
I look forward to seeing you too.
Kevin
|
|
Message has 2 Replies:
 | | Re: SSC: Re: Classic timing circuits and XOR gates (long)
|
| (...) you don't need a rectangular body when you used elbow extention like i did in my hexapod, the front leg's contracts whane it's sweep back and extend when it sweep's forward so the front legs can stay where the are, on the front of the body :) (...) (21 years ago, 9-Aug-05, to lugnet.technic, FTX)
|
Message is in Reply To:
| | SSC: Re: Classic timing circuits and XOR gates (long)
|
| (...) I don't care what Eric says. This is pretty just like it is. :) (sorry to stray from pneumatics) It looks like a totally studless design. (some of the beams used are studded, but could be replaced with studless) Is that correct? I don't see (...) (21 years ago, 9-Aug-05, to lugnet.technic)
|
25 Messages in This Thread:
  
 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|

{kind=link}