Subject:
|
Re: Classic timing circuits and XOR gates (long)
|
Newsgroups:
|
lugnet.technic
|
Date:
|
Tue, 9 Aug 2005 19:36:09 GMT
|
Viewed:
|
5189 times
|
| |

|
|
In lugnet.technic, Mark Bellis wrote:
> In lugnet.technic, Kevin L. Clague wrote:
(SNIP)
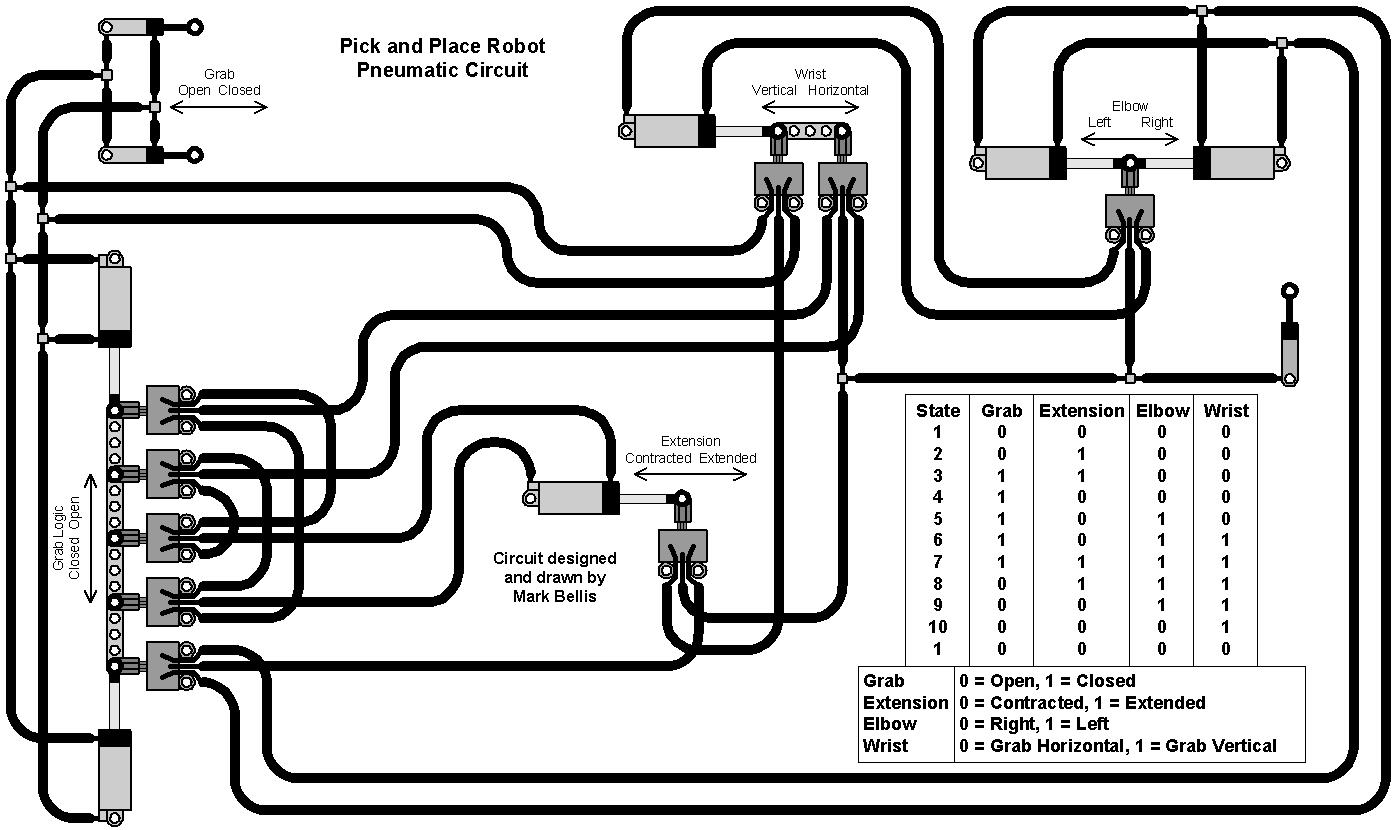
> Can I suggest that in order to avoid leaks (very important in walking robots!)
> you use the full XOR gate from my diagram:
> http://www.brickshelf.com/gallery/mbellis/Technic/Pneumatics/PnP-Robot/pnp_robot_circuit.jpg
I've never had leak problems with a four switch XOR gate. The fifth gate in
your diagram is particular to your overall circuit, right?
> The single switch is the right one of two moved by the wrist and the four switch
> reverser is made from the top four of five moved by the grab. The outputs to
> the XOR result cylinder come from the middle ports of the switches to avoid
> leaks. This is important since your XOR result will be driving load-bearing
> cylinders.
>
> The additional cylinders pushing switches is simply power versus load. One
> cylinder to two switches with a bit to spare, so 2 cylinders can do 5 switches.
Absolutely..... I've found that a single can do the task, but only at maximum
pressure.
>
> I don't recommend cylinders moving one way and then immediately the other way as
> this can lead to race conditions (going into undesirable lock-up states). The
> principle is to always have at least one other cylinder movement between two
> movements of the same cylinder.
Agreed... I had to add race killing by synchronizing leg up and down (meaning I
added switches to each leg that are hooked serially creating big single pressure
AND gates).
>
> For my octopus arm (circuit being drawn) I put one switch on each joint and used
> a 32x32 plate for the logic, knowing that none of those cylinders was load
> bearing, so that none of them would leak. I used 24 switches on the logic
> board, but that was reduced logic to optimise switch use. It used quite a few
> stoppers too (aerials in short tubes blocking unused switch ports to prevent
> leaks). This circuit was based more on combinational logic than on loops.
Yes, I use a lot of stoppers too, when making single pressure AND gates.
>
> For my 6-legged robot (one leg forward at a time and all back together) I used a
> central loop of 7 cylinders each with 2 switches. Six of the seven sets of
> 1c+2s each drove a leg loop of 1c+2s and 1c+3s. Each leg would go up, forward,
> down and tell the central loop to advance to the next leg. When the loop got to
> the seventh cylinder it reversed, but supplied air to pull all legs back
> together. This used fewer stoppers, about 2 per leg. This circuit was based on
> one main loop and six smaller loops, each enabled in turn by the central loop.
Understood.
>
> For SSClagorpion do you have 8 legs in four groups of 2?
No. I have two groups of four legs (for now ;^)
> You can use XOR gates on pairs of legs to show whether they are both in the same
> state or not, and not enable the next part of the circuit till they are.
>
> The XOR gate is far more important to the sequencing of the P+P robot than just
> hanging off for an auxiliary device. The cylinder driven by the XOR gate must
> have a switch that enables the supply to two halves of the circuit, such that
> the circuit can't continue till the XOR output has moved. In the P+P robot I
> have the grab on one side of the circuit and the elbow and wrist on the other
> side. The extension is the XOR result as it operates twice per cycle. It has
> an enabling switch (middle of diagram) that supplies air either to the grab
> cylinders (via the wrist switch) or to the elbow cylinders (via the bottom grab
> switch) but never both at the same time. The wrist cylinders just follow the
> elbow switch because the wrist always moves after the elbow. This circuit was
> based on one main loop split into two halves by one XOR gate.
I have found that in the case of SSC1, I've abandoned the full XOR gate (two
pressures in, two pressures out), for full AND gates (two pressures in, two
pressures out).
This cuts the number of pistons in the central feedback loop (timing circuit) in
half.
>
> I shall have to experiment with multiple XOR gates in a loop to prove the
> concept. I don't recommend throwing four at it immediately!
I don't recommend four XORs at all for my application! ;^)
>
> BTW I've been working on a circuit for a pneumatic "shuttle" that drives a
> 2-cylinder steam engine along a track and back again, stopping when it hits the
> end-stop, doing a function, then reversing when the function has completed. The
> idea is to do a function at each end of the track and then travel along it.
You can reverse the engine rotation using polarity reversors as I did here:
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=414995
Or with a differential as I did here:
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=559884
Or with linkages as used in regular steam engines.
>
> Hope this too is intelligible!
>
> Mark
I understand it very much!
Kevin
|
|
Message has 1 Reply:
 | | Re: Classic timing circuits and XOR gates (long)
|
| (...) Yes, four switches in one bank (grab) and one in the other bank (wrist) make the XOR gate. (SNIP) (...) I have the double reverser scheme in my shuttle circuit at the moment. I didn't see the need for finer phase adjustment yet, since the (...) (21 years ago, 9-Aug-05, to lugnet.technic)
|
Message is in Reply To:
| | Re: Classic timing circuits and XOR gates (long)
|
| In lugnet.technic, Kevin L. Clague wrote: (SNIP) (...) (SNIP) (...) (SNIP) (...) (SNIP) (...) Can I suggest that in order to avoid leaks (very important in walking robots!) you use the full XOR gate from my diagram: (URL) single switch is the right (...) (21 years ago, 8-Aug-05, to lugnet.technic)
|
25 Messages in This Thread:
 
 


- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|

{kind=link}