 | | | | | | |
| |

|
"travis" <phree@attbi.com> wrote in message news:HCpBuo.1CIw@lugnet.com...
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=38966
> this moc uses 38 pieces including the elastic and the electrode.
> can a walker be smaller?
hi
it's me again :)))
well i need some help with mlcad
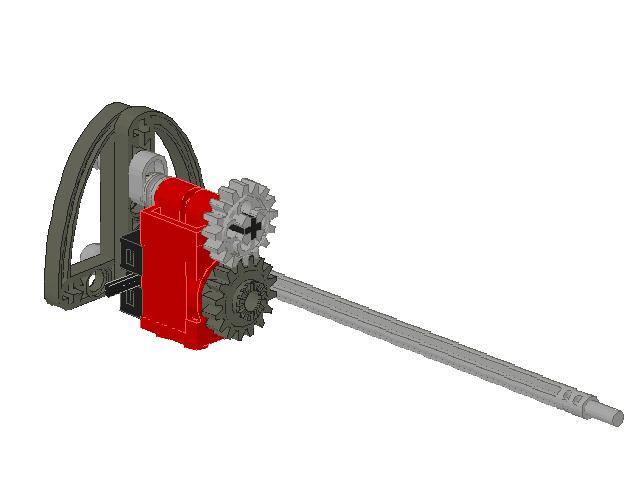
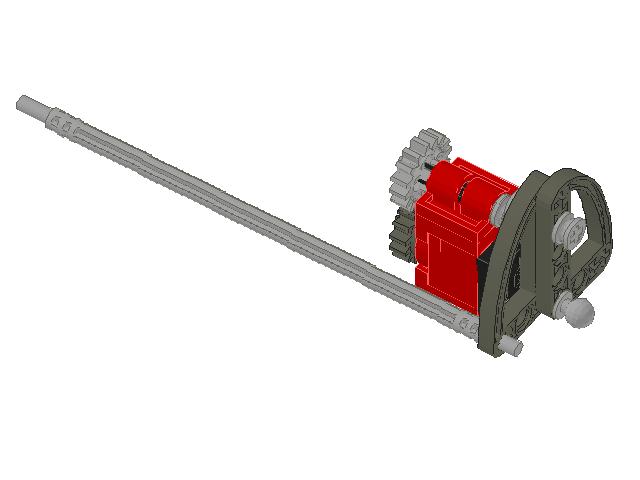
as you can see on the ldr file
i didn't bent flex axle
if someone would tell me if there is a primitive part
of the end shape of flexible axle...
i would use it in flexible tubbing plugin in mlcad
but i belive that everyone will imagine
how it should be in model
the free end of flex axle sould be put into the second triangle part
to suround the walker body
so
my baby walker uses... 16 pieces
it has just one leg :)
but works (walks) perfectly ok
DL
http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
PM
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
let me know what do you think
is it still walker? :)))
regards
pixel
| | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Paul Kleniewski writes:
>
> "travis" <phree@attbi.com> wrote in message news:HCpBuo.1CIw@lugnet.com...
>
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=38966
> > this moc uses 38 pieces including the elastic and the electrode.
> > can a walker be smaller?
>
> hi
> it's me again :)))
> well i need some help with mlcad
> as you can see on the ldr file
> i didn't bent flex axle
> if someone would tell me if there is a primitive part
> of the end shape of flexible axle...
> i would use it in flexible tubbing plugin in mlcad
>
> but i belive that everyone will imagine
> how it should be in model
> the free end of flex axle sould be put into the second triangle part
> to suround the walker body
>
> so
> my baby walker uses... 16 pieces
>
> it has just one leg :)
> but works (walks) perfectly ok
>
> DL
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
>
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
>
> PM
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
>
> let me know what do you think
> is it still walker? :)))
>
> regards
> pixel
Man, these things are gettin' small :). I just had an idea for something
like this. I'm not sure if this could be called a walker because the body
touches the ground as it goes along, but it's a cute little monopod :).
-jrl
| | | | | | | | | | | | | | | | | |
Hi Pixel,
That's minimalist art !
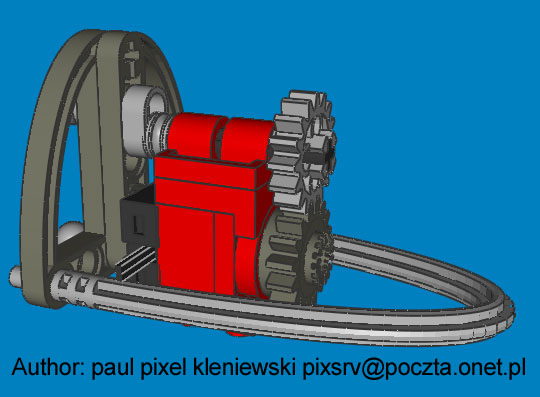
The end primitive is a stretched stud3a.dat
Here is a modified ldr, done with Orion Pobursky's flexible part plugin for
LDDesignPad (http://www.pobursky.com/Ldraw.htm)
http://www.philohome.com/misc/mini05bent.ldr
Image: http://www.philohome.com/misc/mini05.jpg
(brickshelf seems to be down at this time)
Cheers,
Philo
www.philohome.com
> well i need some help with mlcad
> as you can see on the ldr file
> i didn't bent flex axle
> if someone would tell me if there is a primitive part
> of the end shape of flexible axle...
> regards
> pixel
| | | | | | | | | | | | | | | | | | | | |
"Philippe Hurbain" <philohome@free.fr> wrote in message news:HCtLrG.2454@lugnet.com...
> Hi Pixel,
>
> That's minimalist art !
i've got another one idea to make it smaller
> The end primitive is a stretched stud3a.dat
>
> Here is a modified ldr, done with Orion Pobursky's flexible part plugin for
> LDDesignPad (http://www.pobursky.com/Ldraw.htm)
> http://www.philohome.com/misc/mini05bent.ldr
>
> Image: http://www.philohome.com/misc/mini05.jpg
> (brickshelf seems to be down at this time)
thanx a lot philo
| | | | | | | | | | | | | | | | | | | |
| |
|
Hi Paul,
My flexible part synthesizer named LSynth
(http://www.users.qwest.net/~kclague) supports flexible axles.
Kevin
In lugnet.technic, Paul Kleniewski writes:
>
> "travis" <phree@attbi.com> wrote in message news:HCpBuo.1CIw@lugnet.com...
>
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=38966
> > this moc uses 38 pieces including the elastic and the electrode.
> > can a walker be smaller?
>
> hi
> it's me again :)))
> well i need some help with mlcad
> as you can see on the ldr file
> i didn't bent flex axle
> if someone would tell me if there is a primitive part
> of the end shape of flexible axle...
> i would use it in flexible tubbing plugin in mlcad
>
> but i belive that everyone will imagine
> how it should be in model
> the free end of flex axle sould be put into the second triangle part
> to suround the walker body
>
> so
> my baby walker uses... 16 pieces
>
> it has just one leg :)
> but works (walks) perfectly ok
>
> DL
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
>
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
>
> PM
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
>
> let me know what do you think
> is it still walker? :)))
>
> regards
> pixel
| | | | | | | | | | | | | | | | | | | | |
"Kevin L. Clague" <kevin_clague@yahoo.com> wrote in message news:HCtM1A.24v6@lugnet.com...
> Hi Paul,
>
> My flexible part synthesizer named LSynth
> (http://www.users.qwest.net/~kclague) supports flexible axles.
i have some problems with installing it
but during weekend i'll try to do it
thanx mate
pixel
| | | | | | | | | | | | | | | | | | | | | | |
Hi Paul,
FYI. I tried to add the flexible axle using LSynth, and it didn't do as
well as Orion's LLDP plug in.
Looks like work on LSynth might start up soon to improve things.
Kevin
In lugnet.technic, Paul Kleniewski writes:
>
> "Kevin L. Clague" <kevin_clague@yahoo.com> wrote in message news:HCtM1A.24v6@lugnet.com...
> > Hi Paul,
> >
> > My flexible part synthesizer named LSynth
> > (http://www.users.qwest.net/~kclague) supports flexible axles.
>
> i have some problems with installing it
> but during weekend i'll try to do it
> thanx mate
>
> pixel
| | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Paul Kleniewski writes:
>
> "travis" <phree@attbi.com> wrote in message news:HCpBuo.1CIw@lugnet.com...
>
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=38966
> > this moc uses 38 pieces including the elastic and the electrode.
> > can a walker be smaller?
>
> hi
> it's me again :)))
> well i need some help with mlcad
> as you can see on the ldr file
> i didn't bent flex axle
> if someone would tell me if there is a primitive part
> of the end shape of flexible axle...
> i would use it in flexible tubbing plugin in mlcad
>
> but i belive that everyone will imagine
> how it should be in model
> the free end of flex axle sould be put into the second triangle part
> to suround the walker body
>
> so
> my baby walker uses... 16 pieces
>
> it has just one leg :)
> but works (walks) perfectly ok
Paul,
Very cool! It has two legs though... The second leg is the motor itself
IMHO. It just doesn't have a body :^)
Kevin
>
> DL
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
>
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
>
> PM
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
>
> let me know what do you think
> is it still walker? :)))
>
> regards
> pixel
| | | | | | | | | | | | | | | | | |
Subject:
|
Re: baby walker
|
Newsgroups:
|
lugnet.technic
|
Date:
|
Fri, 4 Apr 2003 16:48:17 GMT
|
Reply-To:
|
Øyvind Steinnes <phoenix@online.=stopspammers=no>
|
Viewed:
|
4269 times
|
| |
|
> hi
> it's me again :)))
> well i need some help with mlcad
> as you can see on the ldr file
> i didn't bent flex axle
> if someone would tell me if there is a primitive part
> of the end shape of flexible axle...
> i would use it in flexible tubbing plugin in mlcad
>
> but i belive that everyone will imagine
> how it should be in model
> the free end of flex axle sould be put into the second triangle part
> to suround the walker body
>
> so
> my baby walker uses... 16 pieces
>
> it has just one leg :)
> but works (walks) perfectly ok
Well, I'm sure you can make it smaller :)
I don't have the micromotor myself so I cant try it out.
Can you connect the crankshaft directly too the motor some way?
What is the output from the micromotor? A short cross axel or what?
I've seen somebody used part 2983 (Electric Technic Micromotor Pulley) on
the micromotor, is there a way to connect a Technic Axel 2 to this pulley
and then the Chrankshaft to that axel?
Just an idea without having the micromotor myself....
I want one now, after seeing all those microsize robots :)
Regards
Øyvind Steinnes
http://www.brickshelf.com/cgi-bin/gallery.cgi?m=Phoenix
>
> DL
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
>
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
>
> PM
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
>
> let me know what do you think
> is it still walker? :)))
>
> regards
> pixel
>
>
| | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Øyvind Steinnes writes:
> > hi
> > it's me again :)))
> > well i need some help with mlcad
> > as you can see on the ldr file
> > i didn't bent flex axle
> > if someone would tell me if there is a primitive part
> > of the end shape of flexible axle...
> > i would use it in flexible tubbing plugin in mlcad
> >
> > but i belive that everyone will imagine
> > how it should be in model
> > the free end of flex axle sould be put into the second triangle part
> > to suround the walker body
> >
> > so
> > my baby walker uses... 16 pieces
> >
> > it has just one leg :)
> > but works (walks) perfectly ok
>
> Well, I'm sure you can make it smaller :)
> I don't have the micromotor myself so I cant try it out.
> Can you connect the crankshaft directly too the motor some way?
> What is the output from the micromotor? A short cross axel or what?
> I've seen somebody used part 2983 (Electric Technic Micromotor Pulley) on
> the micromotor, is there a way to connect a Technic Axel 2 to this pulley
> and then the Chrankshaft to that axel?
>
> Just an idea without having the micromotor myself....
> I want one now, after seeing all those microsize robots :)
>
>
> Regards
> Øyvind Steinnes
> http://www.brickshelf.com/cgi-bin/gallery.cgi?m=Phoenix
>
>
>
>
>
> >
> > DL
> > http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
> > http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
> >
> > http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
> >
> > PM
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
> >
> > let me know what do you think
> > is it still walker? :)))
> >
> > regards
> > pixel
> >
> >
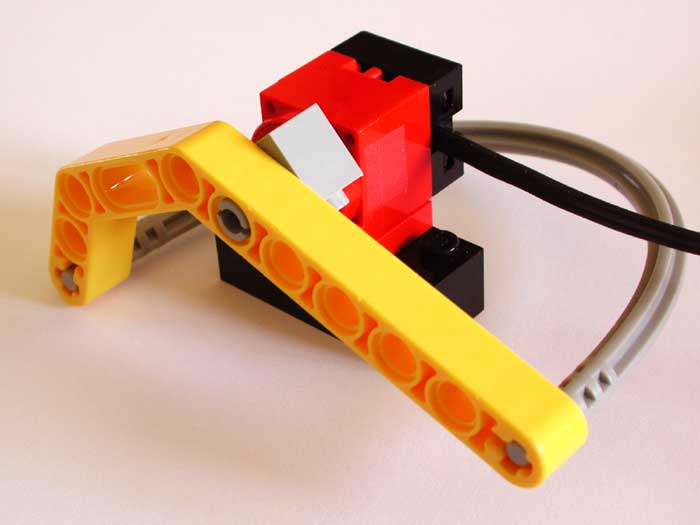
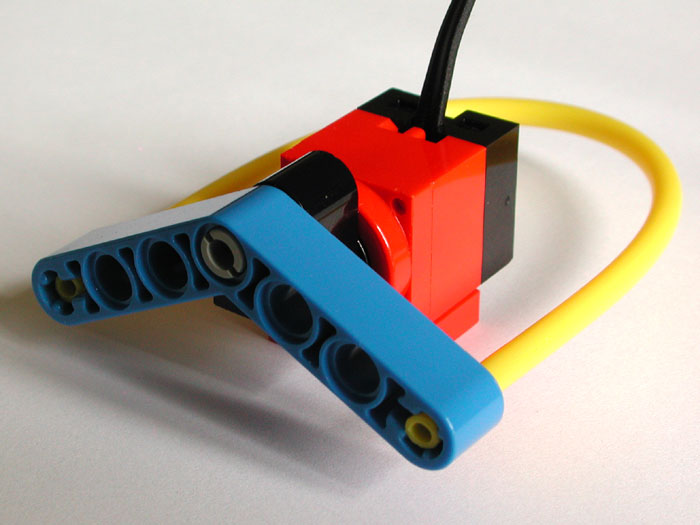
I've got an idea for a walker similar to this one that only uses seven pieces!
I can't try it out yet because I don't have a micro motor yet either, but it
seems like it should work. It uses a 1x2 technic brick with 2 holes
connected directly to the micro motor (the output is the shape of a regular
stud BTW) which is then connected to an 11.5 long double bent liftarm with a
technic pin. Also, it has a 2x4 brick under the motor for stability and uses
a 19 long flexible axle to make up the rest of the foot.
-jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | |
It works!
http://www.philohome.com/misc/walker7.jpg
http://www.philohome.com/misc/walker7b.jpg
...but stability is obtained more from wire stiffness than from 2x4 brick
(not heavy enough, without wire motor would turn over when in topmost position)
Cheers,
Philo
www.philohome.com
>
> I've got an idea for a walker similar to this one that only uses seven pieces!
> I can't try it out yet because I don't have a micro motor yet either, but it
> seems like it should work. It uses a 1x2 technic brick with 2 holes
> connected directly to the micro motor (the output is the shape of a regular
> stud BTW) which is then connected to an 11.5 long double bent liftarm with a
> technic pin. Also, it has a 2x4 brick under the motor for stability and uses
> a 19 long flexible axle to make up the rest of the foot.
>
> -jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain writes:
> It works!
> http://www.philohome.com/misc/walker7.jpg
> http://www.philohome.com/misc/walker7b.jpg
>
> ...but stability is obtained more from wire stiffness than from 2x4 brick
> (not heavy enough, without wire motor would turn over when in topmost position)
>
> Cheers,
>
> Philo
> www.philohome.com
>
> >
> > I've got an idea for a walker similar to this one that only uses seven pieces!
> > I can't try it out yet because I don't have a micro motor yet either, but it
> > seems like it should work. It uses a 1x2 technic brick with 2 holes
> > connected directly to the micro motor (the output is the shape of a regular
> > stud BTW) which is then connected to an 11.5 long double bent liftarm with a
> > technic pin. Also, it has a 2x4 brick under the motor for stability and uses
> > a 19 long flexible axle to make up the rest of the foot.
> >
> > -jrl
Cool! I figured that the stiffness of the wire would help. I guess I'll call
it Shorty ,as it's only a little over an inch tall :). Now I've just got to
get that micro motor ordered so I can try it out myself. I'm wondering if
you could try out a slightly different design for me. It wouldn't use the
block under the motor (because as you said, the wire helps more than it
does) and it would use a 1x7 bent liftarm connected to a 16 long flexible
axle or flex hose of similar length. You could try it without a brick under
the motor or with a 2x2 plate there. If you could let me know how it works
out, I'd appreciate it.
Thanks,
jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
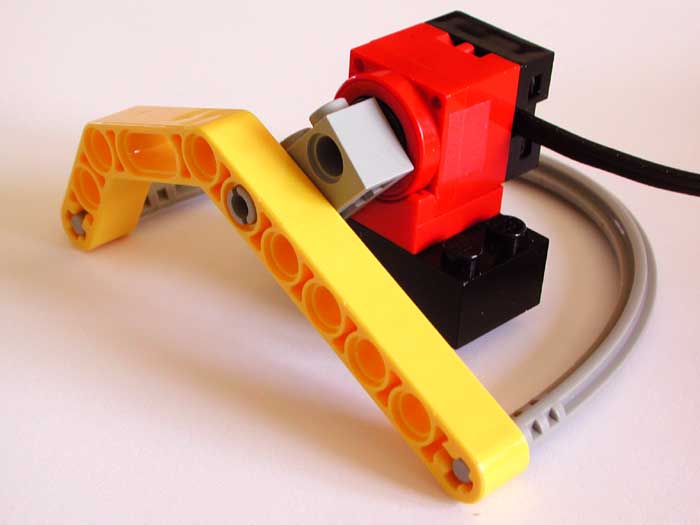
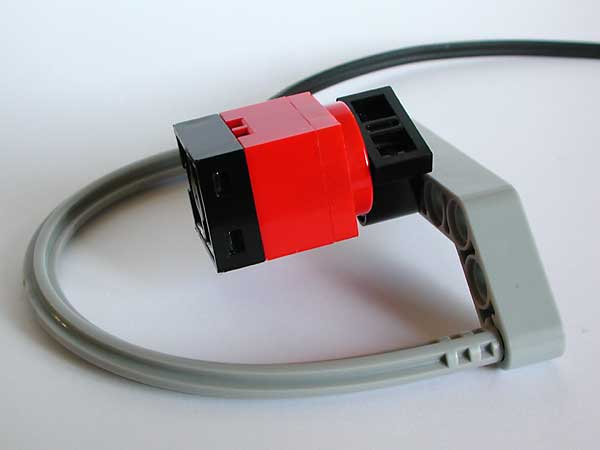
...and then they were five...
The 1x7 liftarm is a bit short and the motor bumps against the flexible axle.
So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor bottom.
I used a 1x2 liftarm with plate only for aestetical reasons...
Photos:
http://www.philohome.com/misc/monopod5a.jpg
http://www.philohome.com/misc/monopod5b.jpg
http://www.philohome.com/misc/monopod5c.jpg
Small QuickTime movie:
http://www.philohome.com/misc/monopod5b.mov (200KB)
I guess it will be hard to get a lower part count ;o)
Philo
www.philohome.com
> Cool! I figured that the stiffness of the wire would help. I guess I'll call
> it Shorty ,as it's only a little over an inch tall :). Now I've just got to
> get that micro motor ordered so I can try it out myself. I'm wondering if
> you could try out a slightly different design for me. It wouldn't use the
> block under the motor (because as you said, the wire helps more than it
> does) and it would use a 1x7 bent liftarm connected to a 16 long flexible
> axle or flex hose of similar length. You could try it without a brick under
> the motor or with a 2x2 plate there. If you could let me know how it works
> out, I'd appreciate it.
>
> Thanks,
>
> jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
after watching that film, i got to say that this is fun but its totally not
a walker. first foremost for that leg drag, I'd rename this Igor or
somthing.
-tk
"Philippe Hurbain" <philohome@free.fr> wrote in message
news:HCvtts.nF@lugnet.com...
> ...and then they were five...
>
> The 1x7 liftarm is a bit short and the motor bumps against the flexible • axle.
> So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor • bottom.
> I used a 1x2 liftarm with plate only for aestetical reasons...
>
> Photos:
> http://www.philohome.com/misc/monopod5a.jpg
> http://www.philohome.com/misc/monopod5b.jpg
> http://www.philohome.com/misc/monopod5c.jpg
> Small QuickTime movie:
> http://www.philohome.com/misc/monopod5b.mov (200KB)
>
> I guess it will be hard to get a lower part count ;o)
>
> Philo
> www.philohome.com
>
> > Cool! I figured that the stiffness of the wire would help. I guess I'll • call
> > it Shorty ,as it's only a little over an inch tall :). Now I've just got • to
> > get that micro motor ordered so I can try it out myself. I'm wondering if
> > you could try out a slightly different design for me. It wouldn't use the
> > block under the motor (because as you said, the wire helps more than it
> > does) and it would use a 1x7 bent liftarm connected to a 16 long flexible
> > axle or flex hose of similar length. You could try it without a brick • under
> > the motor or with a 2x2 plate there. If you could let me know how it • works
> > out, I'd appreciate it.
> >
> > Thanks,
> >
> > jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain writes:
> ...and then they were five...
>
> The 1x7 liftarm is a bit short and the motor bumps against the flexible axle.
> So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor bottom.
> I used a 1x2 liftarm with plate only for aestetical reasons...
>
> Photos:
> http://www.philohome.com/misc/monopod5a.jpg
> http://www.philohome.com/misc/monopod5b.jpg
> http://www.philohome.com/misc/monopod5c.jpg
> Small QuickTime movie:
> http://www.philohome.com/misc/monopod5b.mov (200KB)
>
> I guess it will be hard to get a lower part count ;o)
>
> Philo
> www.philohome.com
Very cool!
Thanks for trying out the design for me, I would have worked on it myself,
but I'm glad you could help me out. I'm wondering, did the design with 7
pieces get its foot totally off the ground? I think lego is actually making
a two-long liftarm now, but I used the closest thing I had. I'm also
wondering if it would be okay with you if I used some of your pictures for
my gallery at brickshelf, since I can't take any right now.
Thanks again,
jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain writes:
> ...and then they were five...
>
> The 1x7 liftarm is a bit short and the motor bumps against the flexible axle.
> So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor bottom.
> I used a 1x2 liftarm with plate only for aestetical reasons...
>
> Photos:
> http://www.philohome.com/misc/monopod5a.jpg
> http://www.philohome.com/misc/monopod5b.jpg
> http://www.philohome.com/misc/monopod5c.jpg
> Small QuickTime movie:
> http://www.philohome.com/misc/monopod5b.mov (200KB)
>
> I guess it will be hard to get a lower part count ;o)
>
> Philo
> www.philohome.com
>
> > Cool! I figured that the stiffness of the wire would help. I guess I'll call
> > it Shorty ,as it's only a little over an inch tall :). Now I've just got to
> > get that micro motor ordered so I can try it out myself. I'm wondering if
> > you could try out a slightly different design for me. It wouldn't use the
> > block under the motor (because as you said, the wire helps more than it
> > does) and it would use a 1x7 bent liftarm connected to a 16 long flexible
> > axle or flex hose of similar length. You could try it without a brick under
> > the motor or with a 2x2 plate there. If you could let me know how it works
> > out, I'd appreciate it.
> >
> > Thanks,
> >
> > jrl
I was just thinking about the design and that I would really like to have it
lift its foot off the ground, and I think I have something. I think that a
1x7 liftarm with an 18 long flex tube would be a touch smaller and allow the
foot to clear the ground. The diameter of the flex tube is slightly smaller
than the flexible axle and I don't think the motor would bump it. Please let
me know if it works, and I don't mean to bother you.
Thanks,
jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
> Very cool!
>
> Thanks for trying out the design for me, I would have worked on it myself,
> but I'm glad you could help me out. I'm wondering, did the design with 7
> pieces get its foot totally off the ground?
Actually no, the double bent liftarm has no point where it balances perfectly.
> I think lego is actually making
> a two-long liftarm now, but I used the closest thing I had.
yes, http://peeron.com/inv/parts/43857 (but I've none yet!)
> I'm also
> wondering if it would be okay with you if I used some of your pictures for
> my gallery at brickshelf, since I can't take any right now.
Sure you can !!!
>
> I was just thinking about the design and that I would really like to have it
> lift its foot off the ground, and I think I have something. I think that a
> 1x7 liftarm with an 18 long flex tube would be a touch smaller and allow the
> foot to clear the ground. The diameter of the flex tube is slightly smaller
> than the flexible axle and I don't think the motor would bump it. Please let
> me know if it works, and I don't mean to bother you.
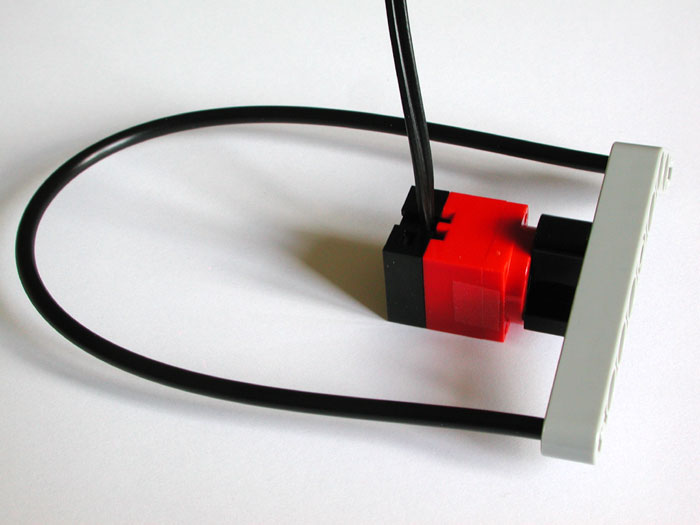
Yes it works, but to rise the foot completely you have to add the bottom
motor part. I had a completely lifting foot using the 5 pieces design by
replacing the flex axle with a 29L flex tube (thats a bigfoot!!!), the added
weight compensate better 1x7 liftarm weight.
Philo
www.philohome.com
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain writes:
> > Very cool!
> >
> > Thanks for trying out the design for me, I would have worked on it myself,
> > but I'm glad you could help me out. I'm wondering, did the design with 7
> > pieces get its foot totally off the ground?
> Actually no, the double bent liftarm has no point where it balances perfectly.
>
> > I think lego is actually making
> > a two-long liftarm now, but I used the closest thing I had.
> yes, http://peeron.com/inv/parts/43857 (but I've none yet!)
>
> > I'm also
> > wondering if it would be okay with you if I used some of your pictures for
> > my gallery at brickshelf, since I can't take any right now.
>
> Sure you can !!!
>
> >
> > I was just thinking about the design and that I would really like to have it
> > lift its foot off the ground, and I think I have something. I think that a
> > 1x7 liftarm with an 18 long flex tube would be a touch smaller and allow the
> > foot to clear the ground. The diameter of the flex tube is slightly smaller
> > than the flexible axle and I don't think the motor would bump it. Please let
> > me know if it works, and I don't mean to bother you.
>
> Yes it works, but to rise the foot completely you have to add the bottom
> motor part. I had a completely lifting foot using the 5 pieces design by
> replacing the flex axle with a 29L flex tube (thats a bigfoot!!!), the added
> weight compensate better 1x7 liftarm weight.
>
> Philo
> www.philohome.com
Thanks,
I'll be trying it out soon myself. I figured that if it lifted its foot off
the ground, it would more easily be considered a walker. I hope you have fun
watching it stomp around :).
-jrl
P.S. Are you planning on taking any pics?
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
>
> I'll be trying it out soon myself. I figured that if it lifted its foot off
> the ground, it would more easily be considered a walker. I hope you have fun
> watching it stomp around :).
>
> -jrl
>
> P.S. Are you planning on taking any pics?
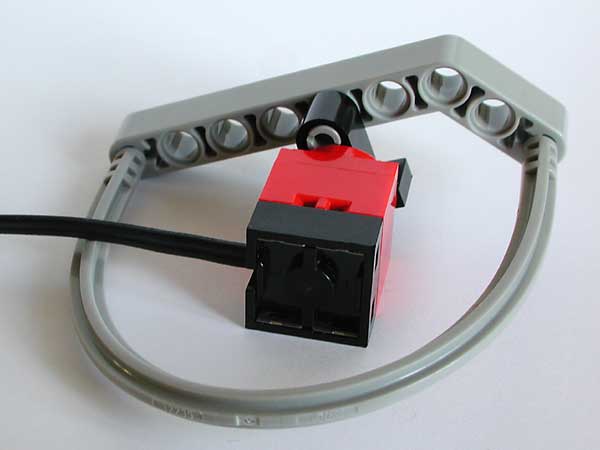
Here they are:
The 5 pieces version looks really disproportionate:
http://www.philohome.com/misc/monopod5d.jpg
The 6 pieces is nicer and "walks" well:
http://www.philohome.com/misc/monopod6.jpg
http://www.philohome.com/misc/monopod6.mov (350K)
Philo
www.philohome.com
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Philippe Hurbain writes:
> >
> > I'll be trying it out soon myself. I figured that if it lifted its foot off
> > the ground, it would more easily be considered a walker. I hope you have fun
> > watching it stomp around :).
> >
> > -jrl
> >
> > P.S. Are you planning on taking any pics?
>
> Here they are:
>
> The 5 pieces version looks really disproportionate:
> http://www.philohome.com/misc/monopod5d.jpg
> The 6 pieces is nicer and "walks" well:
> http://www.philohome.com/misc/monopod6.jpg
> http://www.philohome.com/misc/monopod6.mov (350K)
>
> Philo
> www.philohome.com
Great!
The six piece design is nicer all around, but I guess if someone wants the
design with one less piece, the fiver is kind of neat in its own way. This
is actually less than an inch tall! I guess that probably classifies it as
the shortest walker (or at least stomper) made from Legos so far, so I think
the name Shorty fits :) Thanks for testing the designs for me, and also the
pictures are very nice :)
-jrl
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
"Philippe Hurbain" <philohome@free.fr> wrote in message news:HCxAx3.1zrL@lugnet.com...
> The 5 pieces version looks really disproportionate:
> http://www.philohome.com/misc/monopod5d.jpg
> The 6 pieces is nicer and "walks" well:
> http://www.philohome.com/misc/monopod6.jpg
> http://www.philohome.com/misc/monopod6.mov (350K)
>
> Philo
> www.philohome.com
hi
i suspected that you guys can beat me during weekend
it's true
with just one "but"
do we count the electric connector?
i do
see my design (however lately presented)
http://www.brickshelf.com/gallery/pixsrv/robots/mini7/mini7_01.jpg
btw: i cannot understand how to use extra created parts in mlcad
:(((
best regards to all competitors
i'm waiting for new competition :)
pixel
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
Hello !
> hi
> i suspected that you guys can beat me during weekend
> it's true
;o))
>
> with just one "but"
> do we count the electric connector?
> i do
No, it was not included in count. Actually,
your mini7_01 has the same part count as monopod6.
> see my design (however lately presented)
> http://www.brickshelf.com/gallery/pixsrv/robots/mini7/mini7_01.jpg
What did you use to secure triangle on the crankshaft ?
> btw: i cannot understand how to use extra created parts in mlcad
> :(((
Actually I didn't create the bent part in
http://www.philohome.com/misc/mini05bent.ldr as an individual part, it is
only a bunch of primitives.
Here is the flex axle as part (symmetrical):
http://www.philohome.com/misc/bentflex16x5.dat
and the modified cad file:
http://www.philohome.com/misc/mini05bent-part.ldr
You can place the part in your parts directory (not very wise as it adds
junk there), leave it in the same folder as the main file or better yet
create a .mpd with both files.
Philo
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
> What did you use to secure triangle on the crankshaft ?
Oh yes, it's a Technic Axle Towball !
Philo
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
hi philo
sorry i forgot to send PM folder
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39648
as you can see i used axle pin with tow ball
because the krankshaft is "reversed"
it saves one piece :)
> Actually I didn't create the bent part in
> http://www.philohome.com/misc/mini05bent.ldr as an individual part, it is
> only a bunch of primitives.
> Here is the flex axle as part (symmetrical):
> http://www.philohome.com/misc/bentflex16x5.dat
> and the modified cad file:
> http://www.philohome.com/misc/mini05bent-part.ldr
>
> You can place the part in your parts directory (not very wise as it adds
> junk there), leave it in the same folder as the main file or better yet
> create a .mpd with both files.
when i create .mpd file
i cannot use models on one drawing
i mean switching between models gives me nothing
i want to have these modeals and connect them after creating them separately
thanx for advices
best regards
pixel
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
>
> sorry i forgot to send PM folder
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39648
In your "readme" file
http://www.brickshelf.com/gallery/pixsrv/robots/mini7/info.txt, please give
credit to James Loewen, this is his design MUCH more than mine !!!
>
> when i create .mpd file
> i cannot use models on one drawing
> i mean switching between models gives me nothing
> i want to have these modeals and connect them after creating them separately
From MLcad help file:
"Inserting a sub-model as a part
In the "Available Parts" pane and in the "Part preview" pane there is a
section called document. In this section all sub-models are displayed. Drag
the sub-model from one of this panes into the active model."
Here is the modified .mpd:
http://www.philohome.com/misc/mini7.mpd
Cheers,
Philo
| | | | | | | | | | | | | | | | | | | | | | | | | | | | |
ok done with info.txt
thanx very much for your help philo
pixel
| | | | | | | | | | | | | | | | | | | | | | | | |
(canceled)
| | | | | | | | | | | | | | | | | | | | | | | | | | | |
Lars Gjerløw Jørgensen wrote:
>
> Trouble is.. the micro motor is equipped with a small
> platic ring that only fits the pulley what comes with it.
The micro motor's ring will acutally fit on more than that.
I have sucessfully used it with a "gear 16 tooth with clutch":
http://www.peeron.com/inv/parts/6542
as well as directly on to the bottom of a brick, or in one of the holes
of a beam.
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
it works well with part x 265
peeron:
http://www.peeron.com/inv/parts/x265
-tk
"Lars Gjerløw Jørgensen" <lgjPURGE@jyde.dk> wrote in message
news:Xns935471471AE22lgjatjydedotdk@209.68.63.236...
> Øyvind Steinnes's utterance expressed in news:HCtvwx.vt2@lugnet.com:
>
> > > hi
> > > it's me again :)))
> > > well i need some help with mlcad
> > > as you can see on the ldr file
> > > i didn't bent flex axle
> > > if someone would tell me if there is a primitive part
> > > of the end shape of flexible axle...
> > > i would use it in flexible tubbing plugin in mlcad
> > >
> > > but i belive that everyone will imagine
> > > how it should be in model
> > > the free end of flex axle sould be put into the second triangle part
> > > to suround the walker body
> > >
> > > so
> > > my baby walker uses... 16 pieces
> > >
> > > it has just one leg :)
> > > but works (walks) perfectly ok
> >
> > Well, I'm sure you can make it smaller :)
> > I don't have the micromotor myself so I cant try it out.
> > Can you connect the crankshaft directly too the motor some way?
> > What is the output from the micromotor? A short cross axel or what?
> > I've seen somebody used part 2983 (Electric Technic Micromotor Pulley) • on
> > the micromotor, is there a way to connect a Technic Axel 2 to this • pulley
> > and then the Chrankshaft to that axel?
> >
> > Just an idea without having the micromotor myself....
> > I want one now, after seeing all those microsize robots :)
>
> Trouble is.. the micro motor is equipped with a small
> platic ring that only fits the pulley what comes with it.
>
> http://www.peeron.com/inv/parts/2986 - motor
>
> http://www.peeron.com/inv/parts/2983 - pulley
>
> The pulley can hold an crossaxle or/and a rubber band,
> but it does take up 1 stud to the side :(
>
> Leg godt, sjovt og anderledes!
>
> --
> | lars gjerløw jørgensen | lgj[at]jyde[dot]dk |
> | N55 43.184 E12 32.405 | www.lgj.dk | oz2lgj |
> Mark Hamill:"I have a sneaking suspicion that if there were
> a way to make movies without actors, George (Lucas) would do it."
| | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
Øyvind Steinnes's utterance expressed in news:HCtvwx.vt2@lugnet.com:
> Well, I'm sure you can make it smaller :)
> I don't have the micromotor myself so I cant try it out.
> Can you connect the crankshaft directly too the motor some way?
> What is the output from the micromotor? A short cross axel or what?
> I've seen somebody used part 2983 (Electric Technic Micromotor Pulley) on
> the micromotor, is there a way to connect a Technic Axel 2 to this pulley
> and then the Chrankshaft to that axel?
>
> Just an idea without having the micromotor myself....
> I want one now, after seeing all those microsize robots :)
Trouble is.. the micro motor is equipped with a small
platic ring that only fits the pulley what comes with it.
http://www.peeron.com/inv/parts/2986 - motor
http://www.peeron.com/inv/parts/2983 - pulley
The pulley can hold an crossaxle or/and a rubber band,
but it does take up 1 stud to the side :(
Leg godt, sjovt og anderledes!
--
| lars gjerløw jørgensen | lgj[at]jyde[dot]dk |
| N55 43.184 E12 32.405 | www.lgj.dk | oz2lgj |
Mark Hamill:"I have a sneaking suspicion that if there were
a way to make movies without actors, George (Lucas) would do it."
| | | | | | | | | | | | | | | | | | |
| |
|
I got into a big debate at the bar last night as to whether this is a walker
or not. Believe me, by the end I found myself arguing for this bot's place
as a walker. but that was last night and I had too much to drink. this bot
deserves to be in a different category. whats different about this bot
essentially is that it doesn't ever fall forward or backward while moving.
it more or less lifts itself and shifts.
I guess that i'd say this is not a walker for that reason. its some kind of
stomp bot.
still its amazing how small you got this thing. However this bot is
definately not as cute as the twirp inspired symetrical upright walkers
though. I think that this bot might find a better use as part of a
caterpillar locomotion system or something.
good work.
-tk
"pixel" <pixsrv@poczta.onet.pl> wrote in message
news:HCt7zL.15qA@lugnet.com...
>
> "travis" <phree@attbi.com> wrote in message news:HCpBuo.1CIw@lugnet.com...
>
> > http://www.brickshelf.com/cgi-bin/gallery.cgi?f=38966
> > this moc uses 38 pieces including the elastic and the electrode.
> > can a walker be smaller?
>
> hi
> it's me again :)))
> well i need some help with mlcad
> as you can see on the ldr file
> i didn't bent flex axle
> if someone would tell me if there is a primitive part
> of the end shape of flexible axle...
> i would use it in flexible tubbing plugin in mlcad
>
> but i belive that everyone will imagine
> how it should be in model
> the free end of flex axle sould be put into the second triangle part
> to suround the walker body
>
> so
> my baby walker uses... 16 pieces
>
> it has just one leg :)
> but works (walks) perfectly ok
>
> DL
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_01.jpg
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05_02.jpg
>
> http://www.brickshelf.com/gallery/pixsrv/robots/mini05/mini05.ldr
>
> PM
> http://www.brickshelf.com/cgi-bin/gallery.cgi?f=39260
>
> let me know what do you think
> is it still walker? :)))
>
> regards
> pixel
>
>
| | | | | | |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}