|
|
| |
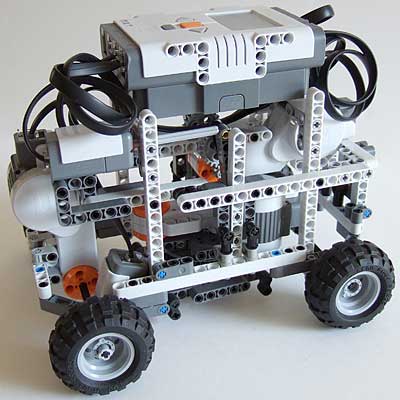
Here is our new sound localizing robot called Nic_3. It is capable of fixing the
azimuth of a sound source that is located in the horizontal plane. The
localizing process is done using the stereo audio amplifier that we already used
with Nic_1 and Nic_2. (For several reasons Nic_2 has not been published yet.)
The amplifier is directly connected to the RCX inputs 2 and 3. (input 1 is used
to power the sensor).
The RCX samples 2 x 1000 data-points on each ear at a frequency of 36kHz. Then
it processes the time-lag between both signals within 100ms. This is
impressively fast, because we apply a high speed phase detection.
The RCX repeats the sampling and detection process 10 times and takes the
average of the measurements. Then the RCX computes the azimuth from the time-lag
and sends the angle to the NXT through the HiTechnic IR-link.
The RCX program has been written in ULTIMATE ROBOLAB and H8-Assembler, while the
NXT has been programmed using the LabVIEW NXT-toolkit.
http://www.convict.lu/htm/rob/phase_detection.htm
|
|
| |
In lugnet.robotics, William Toenjes wrote:
> Congrats to Steve Hassenplug on the mention at
> http://blog.wired.com/geekdad/2008/09/geekdad-invents.html
> PSumo Programmable Sumo Robots with LEGO MINDSTORMS at Brickfair
> For all the details see http://www.teamhassenplug.org/sumo/PSumo.html
> Even Tormod Askildsen (Head of LEGO Community Development) got in on the action
> :)
> RFID Sensors available at http://www.codatex.com/shop/
> Looking forward to the documentation so that less technically minded "Geek Dads"
> and our kids can wrap our brains around the constructions & programming.
> Hope to see this at Brickworld 2009!
> --
> Bill
> (TooMuchDew)
> G.M.L.T.C.
That's very cool!! Almost like using pre-programmed building blocks in a
computer (like Visual-Orieneted Programming), but instead..on cards! How cool
would it be for TLG to see "NXT motion packs" like trading cards? TLG could
make an NXT add-on pack for something like this.
Great job, Steve!!!
|
|
| |
Hi all,
My Mindstorms kit has been gathering dust for sometime but I just unpacked
it (my daughter is now old enough to join in). However I'm having loads of
grief trying to run it under XP. I read that RIS2.0 supports XP and the
brick can be flashed with RIS 2.0 with the more powerful instruction.
However I can't find a RIS2.0 CD. I tried Lego, but they couldn't supply
one.
Does anyone know how/where I can get RIS 2.0?
Cheers... Martin
--
View this message in context: http://www.nabble.com/Help-locating-RIS-2.0-and-updating-from-1.5-tp19357571p19357571.html
Sent from the LEGO Robotics mailing list archive at Nabble.com.
|
|
| |
Many thanks to John who pointed me to a torrent site.
wotua_doinov wrote:
>
> Hi all,
> My Mindstorms kit has been gathering dust for sometime but I just unpacked
> it (my daughter is now old enough to join in). However I'm having loads
> of grief trying to run it under XP. I read that RIS2.0 supports XP and
> the brick can be flashed with RIS 2.0 with the more powerful instruction.
> However I can't find a RIS2.0 CD. I tried Lego, but they couldn't supply
> one.
>
> Does anyone know how/where I can get RIS 2.0?
>
> Cheers... Martin
--
View this message in context: http://www.nabble.com/Help-locating-RIS-2.0-and-updating-from-1.5-tp19357571p19363548.html
Sent from the LEGO Robotics mailing list archive at Nabble.com.
|
|
| |
What's the url for the torrent site?
Thanks!
-- Perry
On Sep 7, 2008, at 4:07 PM, wotua_doinov wrote:
>
> Many thanks to John who pointed me to a torrent site.
>
>
> wotua_doinov wrote:
> >
> > Hi all,
> > My Mindstorms kit has been gathering dust for sometime but I just
> > unpacked
> > it (my daughter is now old enough to join in). However I'm having
> > loads
> > of grief trying to run it under XP. I read that RIS2.0 supports XP
> > and
> > the brick can be flashed with RIS 2.0 with the more powerful
> > instruction.
> > However I can't find a RIS2.0 CD. I tried Lego, but they couldn't
> > supply
> > one.
> >
> > Does anyone know how/where I can get RIS 2.0?
> >
> > Cheers... Martin
>
>
> --
> View this message in context: http://www.nabble.com/Help-locating-RIS-2.0-and-updating-from-1.5-tp19357571p19363548.html
> Sent from the LEGO Robotics mailing list archive at Nabble.com.
|
|
| |
Please pardon if this is a FAQ. I thought I would write some simple NXT-G
blocks, but couldn't google up anything that looked like a HowTo on the topic.
I've downloaded the SDK material, etc. What I'm really looking for is a simple
"hello world" style example that walks through how to create a skeletal block.
TIA -dave
|
|
| |
On Sat, Sep 13, 2008 at 7:48 PM, Dave Curtis <n6nz@arrl-nospam.net> wrote:
>
> Please pardon if this is a FAQ. I thought I would write some simple NXT-G
> blocks, but couldn't google up anything that looked like a HowTo on the topic.
> I've downloaded the SDK material, etc. What I'm really looking for is a simple
> "hello world" style example that walks through how to create a skeletal block.
> TIA -dave
Dave,
While I don't know of anything like that, all the blocks on my page
are unlocked, so you can check them out.
http://www.teamhassenplug.org/NXT/
Hope that helps
Steve
|
|
| |
Right now I don't know of any better resource than just looking at examples like
Steve's. However, there is a book I wrote titled "LabVIEW for LEGO MINDSTORMS"
that will be out this Fall that contains a primer on writing NXT-G blocks as
well as general programming in LabVIEW for the NXT.
|
|
| |
In lugnet.robotics, Michael Gasperi wrote:
> Right now I don't know of any better resource than just looking at examples like
> Steve's. However, there is a book I wrote titled "LabVIEW for LEGO MINDSTORMS"
> that will be out this Fall that contains a primer on writing NXT-G blocks as
> well as general programming in LabVIEW for the NXT.
Thanks for the input, guys. Right now I'm stuck waiting for NI to act on my
request for the student edition of LabVIEW -- they don't seem to be very speedy.
How long do they usually take?
-dave
|
|
| |
Well, they sometimes need to be inquired after a while - in my case, I never
got an answer to my first request. Only when having asked about it on some
"informal" channel, they sent it rather quickly.
But that's just my personal experience and might be a singular exception to
the rule (?).
- MP
-----Ursprüngliche Nachricht-----
Von: news-gateway@lugnet.com [mailto:news-gateway@lugnet.com] Im Auftrag von
Dave Curtis
Gesendet: Dienstag, 16. September 2008 18:06
An: lugnet.robotics@lugnet.com
Betreff: Re: Primer on writing NXT-G blocks?
In lugnet.robotics, Michael Gasperi wrote:
> Right now I don't know of any better resource than just looking at • examples like
> Steve's. However, there is a book I wrote titled "LabVIEW for LEGO • MINDSTORMS"
> that will be out this Fall that contains a primer on writing NXT-G blocks • as
> well as general programming in LabVIEW for the NXT.
Thanks for the input, guys. Right now I'm stuck waiting for NI to act on my
request for the student edition of LabVIEW -- they don't seem to be very
speedy.
How long do they usually take?
-dave
|
|
| |
Brian,
This is a nice robot. Ive not been on RTL for a bit (computer angst) but this
was a nice video and robot to watch.
Keep up the good work
Regards
Chris
In lugnet.org.ca.rtltoronto, Brian Davis wrote:
> OK, I had to post this in rtl because I confess the main inspiration for this
> was watching Ian's amazing LEGO industrial P&P automations over the years. This
> isn't nearly as fast as his, but it's the first time I've captured a motion I
> really like, and I'm happy with the extensibility of it:
>
> http://www.youtube.com/watch?v=-ZolqjEnhB4
>
> OK, it could use a better name, but still. The other inspiration for this was a
> contest I was in a while ago, to replicate a cube of 2x4 bricks. A lot of the
> folks involved seemed to think that the lack of easy linear mechanism in the NXT
> set was a significant problem. I didn't see it quite that way, at least not when
> I had all these motor encoders "free" with the NXT, and decided to base mine
> entirely on non-linear motion. I didn't quite finish it (gearing to push the
> 2x4's firmly together was a stumbling point), but really liked the manipulative
> mechanism, so I improved it and started testing it. Since one of these "arms"
> only needs two NXT motors, two NXT sets could drive three of these setups,
> leading to a fun looking assembly line.
>
> I'll toss some pics up on Brickshelf if anyone is interested, but really, this
> is awfully simple - most folks here could replicate it from the video alone.
> It's just fun to watch it work with that precision for a long period of time.
|
|
| |
In lugnet.robotics, Chris Magno wrote:
> This is a nice robot.
Thank you. Like I said, you guys (rtl) are at least partially responsible (or to
blame) for this, so I thought I'd flag it your way.
> Ive not been on RTL for a bit (computer angst)
Well, speaking of computer angst, I only realized after the fact that PnP can
literally push it's own off button, turning the NXT brick off on it's own. Maybe
these creations are getting a bit to powerful...
--
Brian Davis
|
|
| |
On Wed, Sep 17, 2008 at 09:23, Brian Davis <brdavis@iusb.edu> wrote:
>
> [...] Well, speaking of computer angst, I only realized after the fact that PnP can
> literally push it's own off button, turning the NXT brick off on it's own. Maybe
> these creations are getting a bit to powerful...
Nah. Pressing the OFF button is OK. It's when it starts pressing the
ON button that
you have to worry. That's why one of my personal rules is "the
deadlier the robot,
the shorter the extension cord."
BTW, not only is the 'bot nice, simple and clean, but so is the video
presentation.
Too many of us build nice stuff, but then fail completely in
presenting it. I wonder
how many time the wheel was invented and lost, because nobody but the inventor
knew about it? (This is back in the days when acing a course in mechanical
engineering at MIT was a lot easier.)
--j
|
|
| |
Hi All,
I've just updated a sample chapter of the LEGO NXT Mechatronics:Intelligent
Machine Concepts book I'm writing to my blog.
<http:www.family-science.net/Blog.htm>. My goal is have the manuscript completed
by the end of the year. Enjoy!!!
Don W.
|
|
| |
I've seen web pages about Lego clocks such as this one:
http://www.popbubble.com/Lego/LegoClocks/
and it want it to be my hobby to make a clock out of Legos. I'm trying to
copy a foreign clock and I'm waiting to get contacted back with info about
the number of teeth for every gear.
Lego gears only have 8, 16, 24, or 40 teeth. I can't remember off of the
top of my head if Lego gears are 24 or 36 pitch.
Does anybody know what companies I can buy custom-cut plastic gears from
that will mesh with Lego gears?
--
View this message in context: http://www.nabble.com/Ordering-custom-cut-plastic-gears-for-Legos-tp19694614p19694614.html
Sent from the LEGO Robotics mailing list archive at Nabble.com.
|
|
| |
In lugnet.robotics, stathmk <stathmk@yahoo.com> wrote:
> Lego gears only have 8, 16, 24, or 40 teeth.
And 12, and 14, and 20, and 36, and then there's that worm-gear. And that's not
even getting into the old-style gears, or that odd 4-tooth knob gear (though
that's really only useful with other 4-tooth knob gears, so it doesn't really
help you).
|
|
| |
In lugnet.cad, Brian Davis wrote:
> In lugnet.cad, Kevin L. Clague wrote:
>
> > the sin of the angle is height/hypotenuse
> > from there you take the sin inverse to get the angle.
>
> Hmm. Is there some reason you couldn't just jump right to using Tan?
> Tan(theta) = opposite/adjacent
Indeed. I make it 31 degrees.
Tim
|
|
| |
> Does anybody know what companies I can buy custom-cut plastic gears from
> that will mesh with Lego gears?
One problem is that changing teeth number also change gear diameter... and you
will run into some troubles with LEGO grids.
Philo
|
|
| |
> Indeed. I make it 31 degrees.
...but if you look at the overall slope of the part, it is closer to 38 degrees.
Philo
|
|
| |
In lugnet.robotics, Philippe Hurbain wrote:
> > Indeed. I make it 31 degrees.
>
> ...but if you look at the overall slope of the part, it is closer to 38 degrees.
So what name do we give this piece? Slopebrick 33, 45 or rather 38?
|
|
| |
In lugnet.parts, Brian Davis wrote:
> In lugnet.parts, Sam Pagel wrote:
>
> > anyone know of a part or combination of parts that would
> > make a 15 degree angle... i have lots of room to work
> > with, just have no idea how to achieve the angle.
>
> Well... as a Technic type, I'd do that with triangles. A long Technic beam as
> the base, and another almost-as-long for the slope, with a small beam for the
> "back" or "support" - since you can join these by pins, the geometry is rather
> variable. How close you need to get to 15°, and how much space you need,
> constrain the problem quite a lot - but an adjustable framework of beam-and-pin
> pieces should give you just about any angle you need.
It doesn't need to be exact, just repeatable. I need to make an armature of 4
or 5 successive 15degree "turns" to support some panels that are making sort of
a jointed arc. I'll give the technic pieces a try. Almost jumped for joy at
Nick Kappatos's suggestion of technic angle connector #3, but it is, alas, 30
degrees.
|
|
| |
In lugnet.robotics, Sam Pagel wrote:
> In lugnet.parts, Brian Davis wrote:
> > In lugnet.parts, Sam Pagel wrote:
> >
> > > anyone know of a part or combination of parts that would
> > > make a 15 degree angle... i have lots of room to work
> > > with, just have no idea how to achieve the angle.
> >
> > Well... as a Technic type, I'd do that with triangles. A long Technic beam as
> > the base, and another almost-as-long for the slope, with a small beam for the
> > "back" or "support" - since you can join these by pins, the geometry is rather
> > variable. How close you need to get to 15°, and how much space you need,
> > constrain the problem quite a lot - but an adjustable framework of beam-and-pin
> > pieces should give you just about any angle you need.
>
> It doesn't need to be exact, just repeatable. I need to make an armature of 4
> or 5 successive 15degree "turns" to support some panels that are making sort of
> a jointed arc. I'll give the technic pieces a try. Almost jumped for joy at
> Nick Kappatos's suggestion of technic angle connector #3, but it is, alas, 30
> degrees.
Further measurements show that connector #3 is 22.5 degrees - this means you can
use these to make a jointed 90 degree arc with 5 panels (the ends would be
perpendicular to each other). Would this meet your design requirement?
|
|
| |
In lugnet.robotics, Nick Kappatos wrote:
> Further measurements show that connector #3 is 22.5 degrees - this means you can
> use these to make a jointed 90 degree arc with 5 panels (the ends would be
> perpendicular to each other). Would this meet your design requirement?
The arc in question only covers 75degrees (5 panels, the first starting at a 15
degree angle). i managed to make it effectively with the suggestion of
triangles out of technic pieces. triangles made of two 1X6 technic bricks and
one 1X2 brick with two holes. it makes a 14 and some degree angle, which is
close enough for my purposes. Thanks everyone for your suggestions, i really
appreciate it. I'll follow up with a render of the armature. Doing all this in
MLCad, so experimentation with angles goes kind of slow, but the final product
is nice.
|
|
| |
Here is the finished frame.
http://www.flickr.com/photos/27256177@N06/2906476210/in/set-72157607558855598/
If you look at the other pictures in the photostream for the ship (yeah, it's a
spaceship) you'll see the paneling on the frame and a mockup of what the
paneling looked like on the ship before i had a frame. The original spacing and
angles were a little different than the final result. Not sure how i feel about
that yet. Comments and criticism are of course welcome.
|
|
| |
Hello again all,
It's been awhile since I've frequented these parts, but I thought I would throw
this out there anyway and see if anyone could help me.
I teach CAD at a Community College in Southern California. Our Electronics
Department Head is helping to organize a FIRST Robotics League for this area,
and he invited me to participate.
Questions:
Is LDD (or any CAD system) used by FLL teams? If so, how? Is there someone (e.g.
at Lego) I can contact for more information on this?
I seem to recall asking this in the past and having mentors tell me the kids
don't have the time/skills to learn CAD (they're too busy learning the Lego
structures and building to be concerned with virtual tools). Is this still the
case?
Should I mention LDraw at all? Or is that way beyond the scope of what rookie
teams should consider?
I know Autodesk is a major sponsor of FIRST at the High School level, where they
give the kids Inventor and 3DSMAX to use for designing and presenting their
robots. But do they do anything with FLL?
Any help would be greatly appreciated!
Darrell Urbien
|
|
| |
I had a rather out-of-the blue request recently, and thought I'd toss it out to
the community at large. A women from the National Society of Black Engineers got
in touch with me about making sumo rings for them: they have six events
scattered around the nation with a national final in Las Vegas. I think this may
be the first time they've done this, and I sent them instructions on how to make
a ring. They asked if there might be anyone local to the events that could help
out by renting or loaning a ring (I think they're going with 4' diameter, 2"
white border). So, I thought I'd give people the chance. Here are the
times/places of the regionals; can anybody help these folks out? I'll put you in
touch if you think you could.
2008 FRC Locations:
Region I
Sheraton Parsippany
Parsippany, New Jersey
November 6 – 9, 2008
Region II
Sheraton Norfolk Waterside
Norfolk, Virginia
October 31 – November 2, 2008
Region III
Wyndham Jacksonville
Jacksonville, Florida
November 21 – 23, 2008
Region IV
Marriott Renaissance Detroit
Detroit, Michigan
November 21 – 23, 200
Region V
Crowne Plaza Dallas Galleria
Dallas, Texas
October 30 – November 2, 2008
Region VI
Marriott Redmond
Microsoft Conference Center
Redmond, WA
November 7 – 9, 2008
Can anybody help them out with a ring or two, or on-site advice?
--
Brian Davis
|
|
| |
OK, so I got roped into going to a meeting of a fledgling Robotics League in
Orange County, California. They invited me because one of the founders of the
League knew I was into Lego. There were several FIRST and FLL coaches,
mentors,and club organizers from other areas of SoCAL present. The idea was to
use their expertise to help start up new teams in my area. But while there was
plenty of talk about involving local schools, afterschool programs, churches,
etc. no one had any idea ADULTS were into this stuff.
Huh? I've never been involved with FLL before, and I've been out of the AFOL
scene entirely for years now, but I thought AFOL groups and FLL were intimately
connected. When I told these people there were internantional conventions, LUGs,
websites, Lego trains run by RCXs, GBCs, Moonbase, etc., they looked at me like
I was speaking in tongues. Then after humoring me for awhile they went on with
the "real" organizing...
Has this been the normal reaction most of you have experienced getting into FLL?
Or is FLL something AFOL are just aware of and not really interested in?
Anyone in OC (or anywhere, for that matter) know how to root out some closet
AFOL who might be interested in starting up/mentoring new FLL teams? Evidently
there are only FOUR teams between LA and SD county!
Darrell
|
|
| |
A robot able to move around along pre-defined paths, and keep an estimation of
its position from encoders in its wheels and central pivot.

Its mechanical structure allows it to go straight with 4 fixed direction wheels,
and to turn precisely around a retractable central pivot.

After a round trip Odin will come back at its starting position with some
position and bearing offset A light sensor placed below Odin enables it to
return home guided by a L-shaped mark on the floor.
More details, images, video, programs and full building instructions available
here.
Enjoy!
Philo
|
|
| |
In lugnet.robotics, Philippe Hurbain wrote:
| |
A robot able to move around along pre-defined paths, and keep an estimation
of its position from encoders in its wheels and central pivot.
Its mechanical structure allows it to go straight with 4 fixed direction
wheels, and to turn precisely around a retractable central pivot.
After a round trip Odin will come back at its starting position with some
position and bearing offset A light sensor placed below Odin enables it to
return home guided by a L-shaped mark on the floor.
More details, images, video, programs and full building instructions
available here.
Enjoy!
Philo
|
Very nice work,... as usual ;-) (Noblesse oblige!)
-Claude
|
|
| |
THE CAN GAME!
Summary
Build a robot made completely out of Lego parts that can find and retain a can.
The robot with the heaviest can at the end of the round wins.
Date and Time
Sat 24-Jan-2009
10:00 AM - 04:30 PM
Location
New Toronto Library
Alex J. Faulkner - Community Room
110 Eleventh St.
Toronto, ON, M8V 3G5
416-394-5350
Google Map
Prizes
1st prize: Set 9604 - LEGO Technic and
Pneumatic elements - (In opened condition)
2nd Prize: Set 4404 - Land Buster -
3rd Prize: Set B100 - LEGO Crazy Action
Contraptions
The Winner can Choose his prize.
Details
Premise of the Game:
Build a robot that can find the heaviest can in the play field.
The play field will contain multiple (unlabeled?) cans of different sizes and
shapes, the Largest can is not necessarily the heaviest.
Rules:
- 2 to 4 Robots can play at the same time
- Each robot will start in one corner of the play area at a 45 degree
- Robot will** travel around the play area and try to find the
- Games will last 3 minutes
- At the end of the game your robot must only be holding one can
- Your robot can hold two cans for weighing purposes only (i.e. no
- Contestants aren’t allowed to weight the cans
- Can can be switched out
- Cans can fall over during the game, so keep that in
Can Specifications:
Largest can possible (i.e. 1 Liter Juice can)
Max weight of a can 1kg (assuming that 1 Liter of Juice weighs the same as 1
Liter of water)
Cans do not have to be
round.
Meat cans
come in a rectangular can with curved sides.
Canned Ham
in a Egg Shaped can
Food Drive.
- Labels will be left on the cans, and covered in white paper (in order to
- Contestants are asked to bring in cans
Robot restrictions:
Your robot should not exceed 18 x 18 x 18 inch cube at the start of the game.
You can build with either the RCX platform or the NXT platform Depending on what
entries we have we may decide to split the competition into 2 different classes.
Definition of an RCX Platform
* RCX’s, Scout, Cybermaster Unit, Micro Scouts, Code Pilot, Spybotics
module, Power Functions Remote and IR sensor (built into your robot) only *
Battery boxes * Any type of Lego Motor
* Any Non custom and non NXT sensors.
* No Custom Parts (non LEGO String or cutting Flex tubing may be allowed)
Definition of an NXT Platform
NXT
NXT + any programmable brick mentioned in the RCX Platform
Battery boxes
Any type of Lego Motor
Any Non custom sensors. Basically any sensor found on the
LEGO Shop @ Home site
No Custom Parts (non LEGO String or cutting Flex tubing may be allowed)
Play field:
The play field will be a 8 x 8 foot Arena using the walls from the old play
field (Dave can we still transport these to the Competition?) I will attempt to
find a library with non carpeted floors.
Scoring:
By Weight
First, Second and Third heaviest cans...
what is the best way to score this... It could be a fluke that some one finds
the heaviest cans first...
Thoughts? Ideas?
I have probably missed something, so Lets discuss and iron out some rules.
Foot notes
** or should, Chris’s robot will probably just sit there ;)
|
|
| |
Hi!
I have tried to get my old (old? It was the first one in Austria!) RCX
1.0 working again, but didn't succeed.
After all these years, the firmware seems to be gone, it doesn't even
run the on-board programs... I tried to install the original software
on WinXP, but it didn't work. Of course I tried the Win95
compatibility mode :-)
I can dive into an alternative system, but then it should look like
(visual) Basic, because that's all I know...
I have the following components:
* RCX 1.0 and the Ir-Tower, incl serial cable.
* a modern Laptop with Dual-Boot Windows XP and Vista.
* This laptop has IrDA and a Serial port.
* The original CD-ROM
* a fast internet connection and some time to download help and/or an
alternative system.
So, what would be the best idea to be able to use the RCX again? It
would be a pity to have 35year old LEGO bricks, but not being able to
use a 10 year old 'brick' anymore...
Thanks in advance!
Ardjan
|
|
| |
In lugnet.robotics, Ardjan Besse wrote:
> Hi!
> I have tried to get my old (old? It was the first one in Austria!) RCX
> 1.0 working again, but didn't succeed.
> After all these years, the firmware seems to be gone, it doesn't even
> run the on-board programs... I tried to install the original software
> on WinXP, but it didn't work. Of course I tried the Win95
> compatibility mode :-)
>
> I can dive into an alternative system, but then it should look like
> (visual) Basic, because that's all I know...
I suggest you use NQC with BricxCC (http://bricxcc.sourceforge.net/). Since your
tower is serial, you should not need to install any other software.
Though it is not VB, it is nonetheless very easy to learn.
Firmware file is on LEGO CD-rom, but it would be better to use the newer and
more powerful 2.0 firmware (look for "firm0328.lgo").
Philo
|
|
| |
On Thu, 23 Oct 2008 14:45:13 GMT, "Philippe hurbain"
<philohome@free.fr> wrote:
> In lugnet.robotics, Ardjan Besse wrote:
> > Hi!
> > I have tried to get my old (old? It was the first one in Austria!) RCX
> > 1.0 working again, but didn't succeed.
> I suggest you use NQC with BricxCC (http://bricxcc.sourceforge.net/). Since your
> tower is serial, you should not need to install any other software.
> Though it is not VB, it is nonetheless very easy to learn.
> Firmware file is on LEGO CD-rom, but it would be better to use the newer and
> more powerful 2.0 firmware (look for "firm0328.lgo").
Thanx for your answer, I'll definitely look into that.
But I just discovered Robolab, from TLG itself. Does that work (RCX1.0
on XP or Vista), and if yes, does it have Firmware coming with it?
A few years ago I worked a bit with LabView at the laboratory, and so
I think this will be more easy for me. Also, I'll have to explain my
son (5.5y) what I am doing. With drawings it will be easier, I
think... :-)
|
|
| |
In lugnet.robotics, Ardjan Besse wrote:
> But I just discovered Robolab, from TLG itself. Does that work (RCX1.0
> on XP or Vista), and if yes, does it have Firmware coming with it?
> A few years ago I worked a bit with LabView at the laboratory, and so
> I think this will be more easy for me. Also, I'll have to explain my
> son (5.5y) what I am doing. With drawings it will be easier, I
> think... :-)
Robolab comes with the RCX firmware and I agree it will probably be a lot easier
to grasp for your son than NXC/NBC. The advantage of the latter though is that
it is completely free.
Since you have a serial tower you'll need to load whatever software you want to
use in Windos XP since Vista doesn't support the serial port.
Regards,
Jetro
|
|
|
{kind=link}
{kind=link}
{kind=link}