| |
I saw this linked on Slashdot:
http://www.prweb.com/releases/2005/12/prweb316686.htm
Allow me to cut through the inventor’s verbosity and translate the concept:
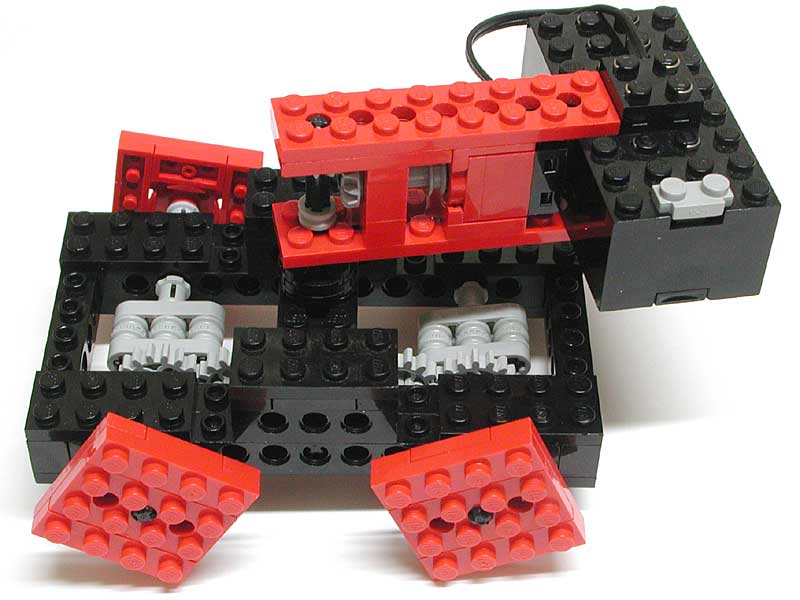
The square wheels are mechanically linked and turn in unison, but they’re offset
from each other. The weight at the top of the vehicle forces one of the squre
wheels to stay flat on the ground. As the weight rotates to a new square, that
square has to turn to become flat, which makes all the others turn.
I think I’ll try building one of these, if I can get the offset angle to work.
It’s 1/4 of 90 degrees, according to the article.
The way this vehicle is set up, it only moves in a straight line. How might one
steer it? Shifting the center of gravity? Disconnecting one of the wheels from
the others temporarily?
|
|
| |
On Tue, December 6, 2005 10:29 am, Jordan Bradford wrote:
> I saw this linked on Slashdot:
>
> <http://www.prweb.com/releases/2005/12/prweb316686.htm>
>
> Allow me to cut through the inventor's verbosity and translate the concept:
>
> The square wheels are mechanically linked and turn in unison, but they're offset
> from each other. The weight at the top of the vehicle forces one of the squre
> wheels to stay flat on the ground. As the weight rotates to a new square, that
> square has to turn to become flat, which makes all the others turn.
>
> I think I'll try building one of these, if I can get the offset angle to work.
> It's 1/4 of 90 degrees, according to the article.
>
> The way this vehicle is set up, it only moves in a straight line. How might one
> steer it? Shifting the center of gravity? Disconnecting one of the wheels from
> the others temporarily?
I think one way to steer it is to split the robot in half, and twist in the middle.
However, that will make it hard to keep the front and back wheels in sync.
Steve
|
|
| |
In lugnet.technic, Steve Hassenplug wrote:
> On Tue, December 6, 2005 10:29 am, Jordan Bradford wrote:
> > I saw this linked on Slashdot:
> >
> > <http://www.prweb.com/releases/2005/12/prweb316686.htm>
> >
> > Allow me to cut through the inventor's verbosity and translate the concept:
> >
> > The square wheels are mechanically linked and turn in unison, but they're offset
> > from each other. The weight at the top of the vehicle forces one of the squre
> > wheels to stay flat on the ground. As the weight rotates to a new square, that
> > square has to turn to become flat, which makes all the others turn.
> >
> > I think I'll try building one of these, if I can get the offset angle to work.
> > It's 1/4 of 90 degrees, according to the article.
> >
> > The way this vehicle is set up, it only moves in a straight line. How might one
> > steer it? Shifting the center of gravity? Disconnecting one of the wheels from
> > the others temporarily?
>
> I think one way to steer it is to split the robot in half, and twist in the middle.
> However, that will make it hard to keep the front and back wheels in sync.
>
> Steve
Right, Steve - keeping the wheels in sync may be the problem. You're onto
something with the split in the chassis, though, and I thought of a
three-wheeled version, where the front single wheel can pivot, like on a
tricycle.
I found this article on the subject too:
http://www.maa.org/mathland/mathtrek_04_05_04.html
Ed
|
|
| |
In lugnet.technic, Ed McGlynn wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > On Tue, December 6, 2005 10:29 am, Jordan Bradford wrote:
> > > I saw this linked on Slashdot:
> > >
> > > <http://www.prweb.com/releases/2005/12/prweb316686.htm>
> > >
> > > Allow me to cut through the inventor's verbosity and translate the concept:
> > >
> > > The square wheels are mechanically linked and turn in unison, but they're offset
> > > from each other. The weight at the top of the vehicle forces one of the squre
> > > wheels to stay flat on the ground. As the weight rotates to a new square, that
> > > square has to turn to become flat, which makes all the others turn.
> > >
> > > I think I'll try building one of these, if I can get the offset angle to work.
> > > It's 1/4 of 90 degrees, according to the article.
> > >
> > > The way this vehicle is set up, it only moves in a straight line. How might one
> > > steer it? Shifting the center of gravity? Disconnecting one of the wheels from
> > > the others temporarily?
> >
> > I think one way to steer it is to split the robot in half, and twist in the middle.
> > However, that will make it hard to keep the front and back wheels in sync.
> >
> > Steve
>
> Right, Steve - keeping the wheels in sync may be the problem. You're onto
> something with the split in the chassis, though, and I thought of a
> three-wheeled version, where the front single wheel can pivot, like on a
> tricycle.
>
> I found this article on the subject too:
> http://www.maa.org/mathland/mathtrek_04_05_04.html
>
> Ed
Slashdot had a link to an article about that vehicle, too, but it requires a
specially-shaped surface to work. The one with the rotating weight works on a
flat surface.
|
|
| |
In lugnet.technic, Jordan Bradford wrote:
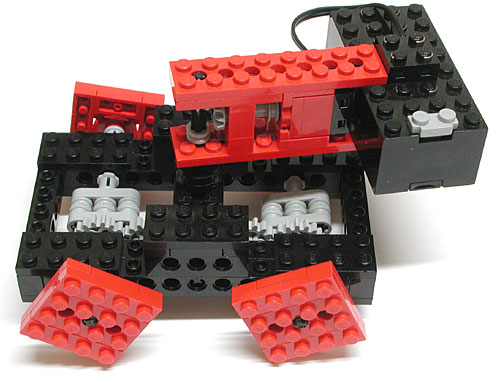
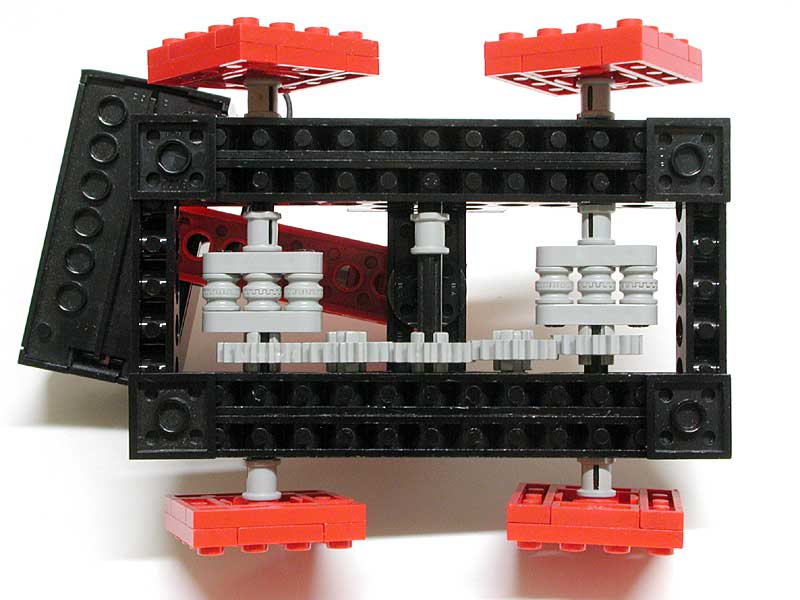
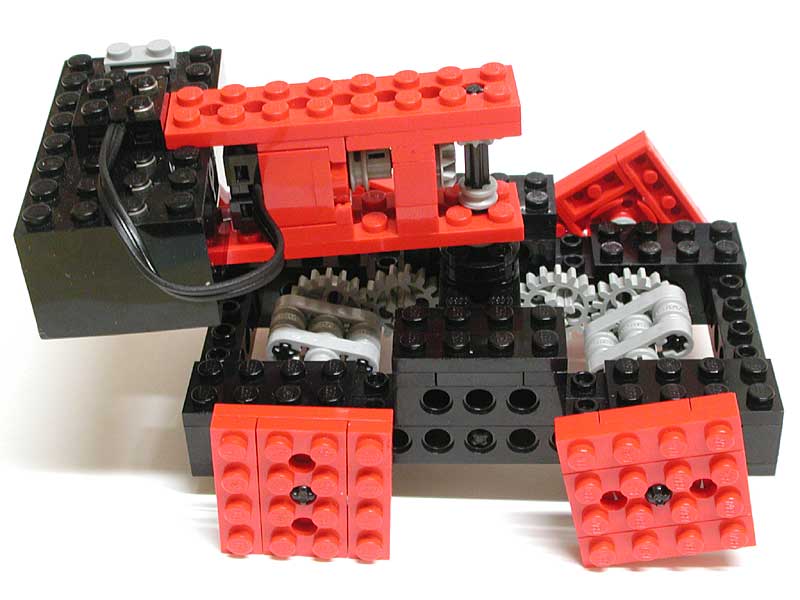
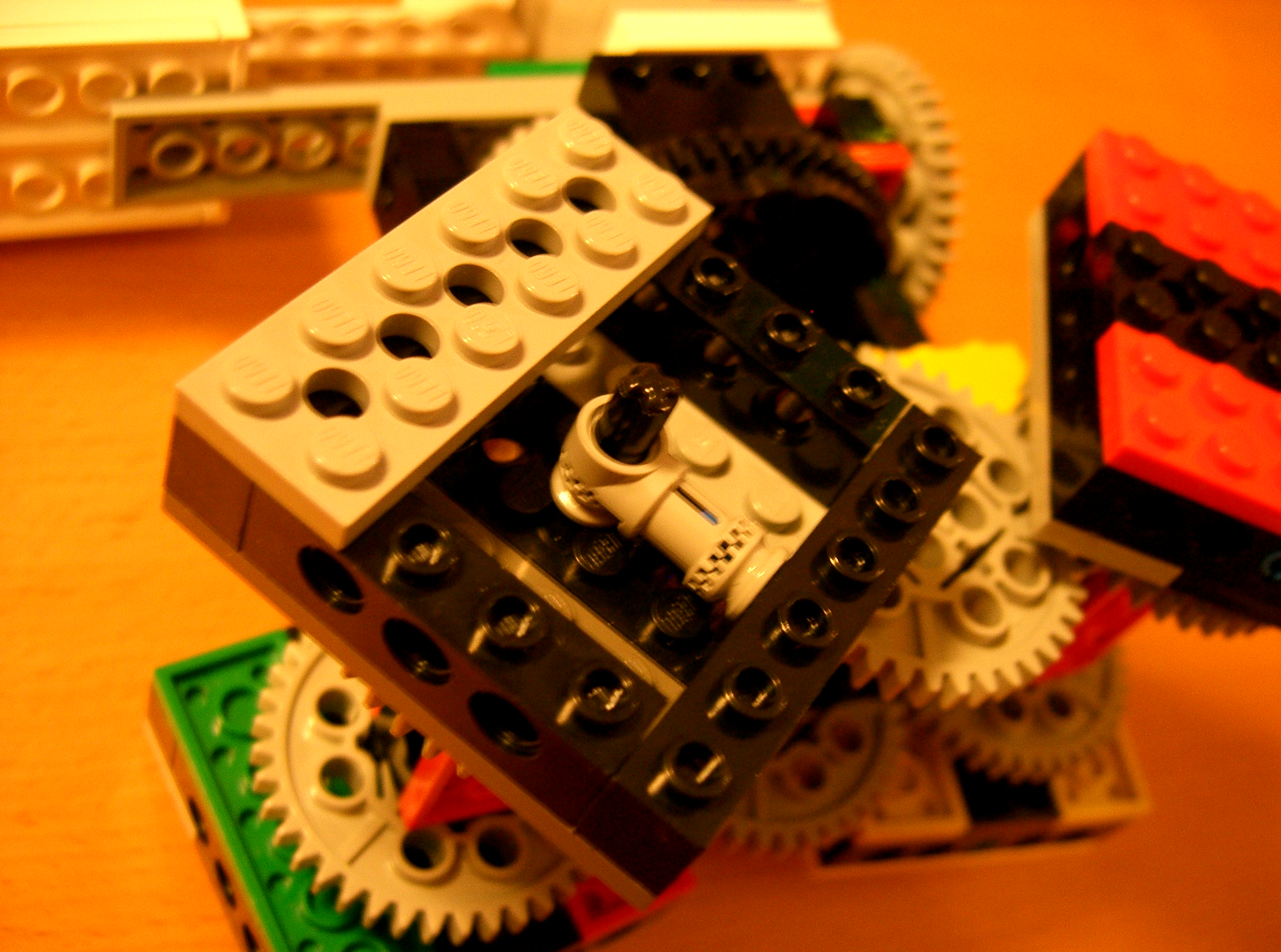
I finally got it to work... (click for bigger images)
...and a short video clip (600k, DivX 5 AVI file).
Enjoy !
Philo
|
|
| |
Sorry, bad link.
Video clip (600k, DivX 5 AVI file).
Philo
|
|
| |
In lugnet.technic, Philippe Hurbain wrote:
| |
In lugnet.technic, Jordan Bradford wrote:
I finally got it to work... (click for bigger images)
...and a short video clip (600k, DivX 5 AVI file).
Enjoy !
Philo
|
Fantastic work. I hadn’t even started my attempt. I like your using the battery
box as the weight -- it’s very simple and compact.
I noticed from the video that it tends to veer left. Are the wheels losing
traction when they’re fully flat?
|
|
| |
In lugnet.technic, Jordan Bradford wrote:
> Fantastic work. I hadn't even started my attempt. I like your using the
> battery box as the weight -- it's very simple and compact.
>
> I noticed from the video that it tends to veer left. Are the wheels losing
> traction when they're fully flat?
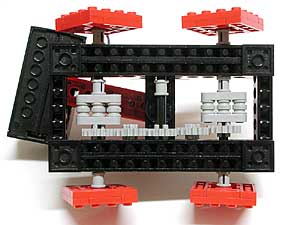
I think the veer left comes from gear backlash. Front and rear wheels are not
maintained strictly 22.5° apart and the way it works, this introduces left/right
dissymetry. My first attempt used 3 z24 gears with less backlash but of couse I
could only offset front and rear by 15° or 30° and it didn't work.
Philo
|
|
| |
In lugnet.technic, Philippe Hurbain wrote:
> In lugnet.technic, Jordan Bradford wrote:
> > Fantastic work. I hadn't even started my attempt. I like your using the
> > battery box as the weight -- it's very simple and compact.
> >
> > I noticed from the video that it tends to veer left. Are the wheels losing
> > traction when they're fully flat?
>
> I think the veer left comes from gear backlash. Front and rear wheels are not
> maintained strictly 22.5° apart and the way it works, this introduces left/right
> dissymetry. My first attempt used 3 z24 gears with less backlash but of couse I
> could only offset front and rear by 15° or 30° and it didn't work.
>
> Philo
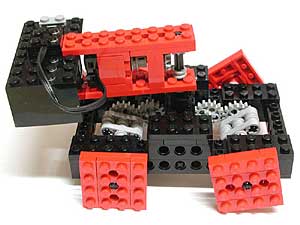
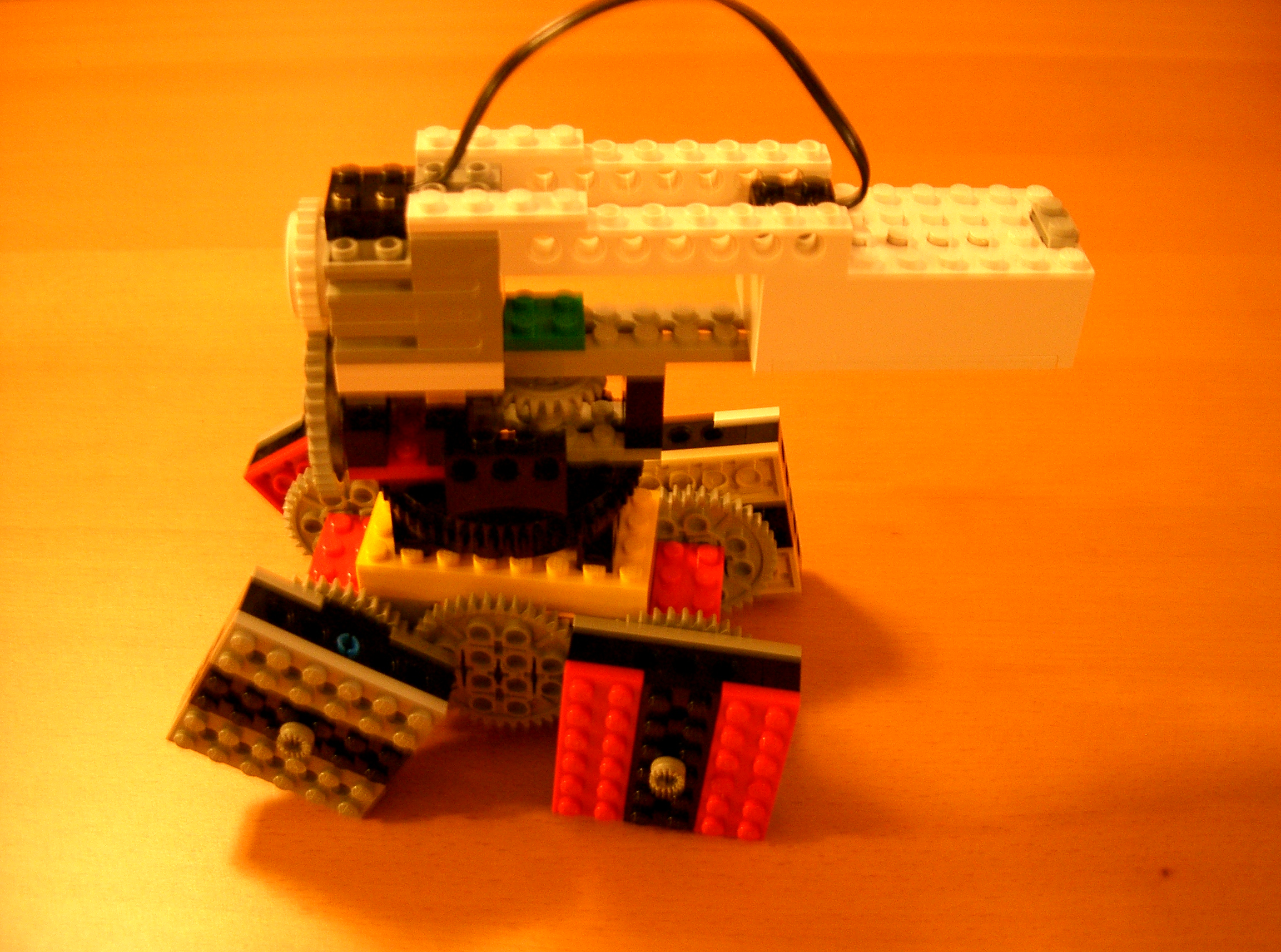
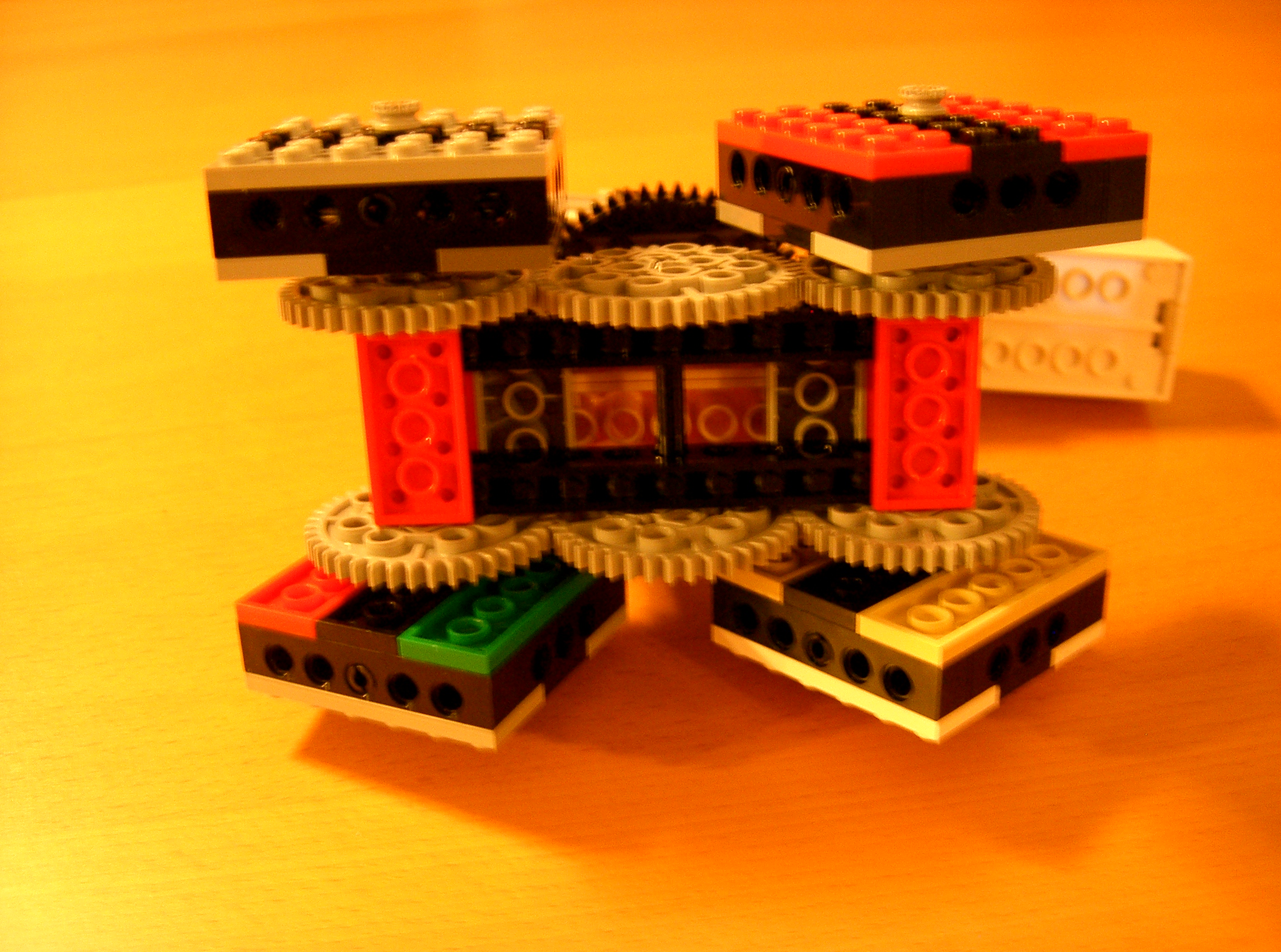
I built one similar to yours last night (I put gears on both sides as an
experiment). You're correct that it's the gear backlash that causes the wheels
to not quite turn at the same time. Pushing the wheels down manually with your
finger is a good way to watch it happen because the process is slower.
|
|
|
{kind=link}
{kind=link}
{kind=link}