Subject:
|
Re: Hex565 - one leg at at time pneumatic hexapod
|
Newsgroups:
|
lugnet.technic, lugnet.robotics
|
Date:
|
Tue, 4 Oct 2005 20:16:08 GMT
|
Viewed:
|
4463 times
|
| |

|
|
In lugnet.technic, Kevin L. Clague wrote:
> Over the last few weeks, I've been working on a pneumatic hexapod that moves one
> leg at a time.
>
> I got it working this morning. It is pretty cool.
>
> It uses 7 large pistons (six for making the legs move forward/backward) and one
> for controling the stride that moves the body forward.
>
> It uses 24 small pistons. Each leg requires two switches to determine when a
> leg is up and down. My standard ratio is two small pistons per switch. Each
> group of four small pistons could be easily replaced with a single large piston.
That's good - not many of us have that many small pistons! I wish TLG would
bring them out in a set again.
I remember when they used to be available as spare parts they cost as much as a
large piston. 31 pistons and 32 switches is a similar cost to my 19 pistons and
44 switches, though your alternative of 13 pistons and 32 switches looks
attractive.
>
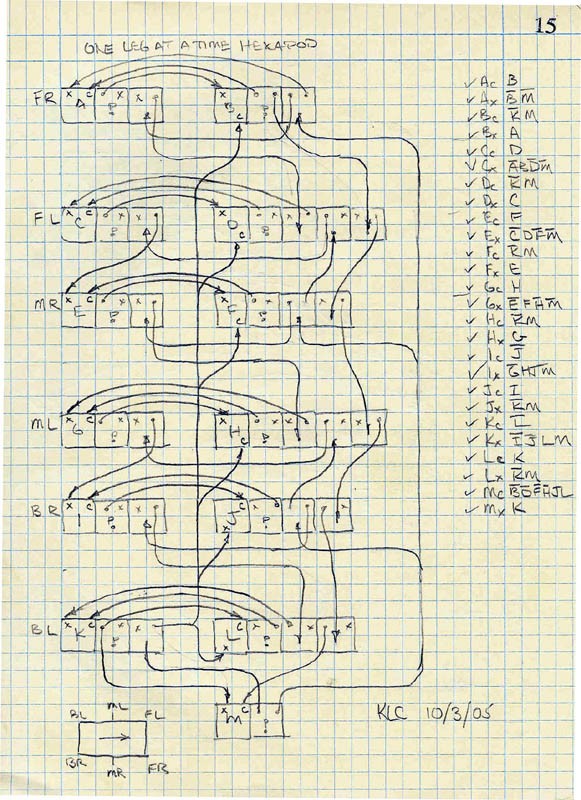
> Here is the timing diagram used to design the circuit.
>
> http://www.brickshelf.com/gallery/kclague/hex565/timing.jpg
>
> Here is a schematic for the circuit:
>
> http://www.brickshelf.com/gallery/kclague/hex565/schematic.jpg
>
> It is one of the bigger circuits I've made. It took a bit to debug.
I see you've kept the modular capability, enabling the adding or subtracting of
legs in pairs. Getting rid of the master loop circuit from my earlier design
has helped reduce the component count (since I see you reduced it by about n
pistons and 2n switches).
>
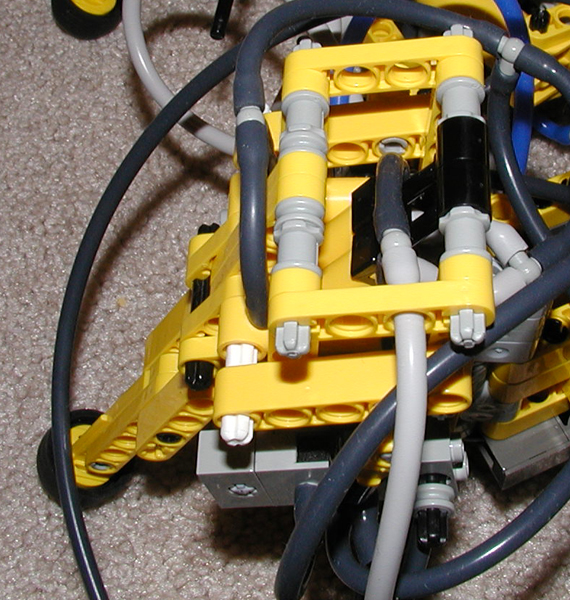
> Here is a picture of the entire model:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300001.jpg
>
> Here is the busy underside:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300006.jpg
>
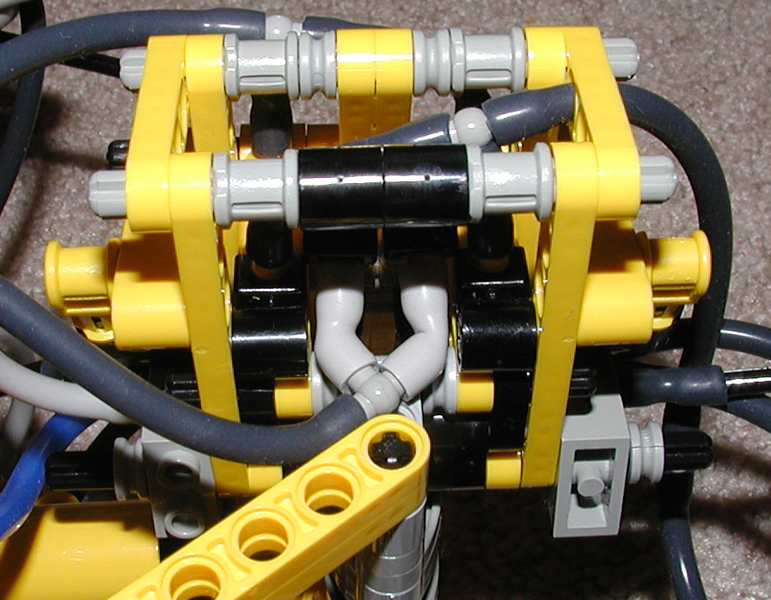
> Here are pictures of the leg lift/drop mechanism. The legs have a cute leg lock
> mechanism driven by the horizontal small pistons.
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300004.jpg
> http://www.brickshelf.com/gallery/kclague/hex565/p9300005.jpg
>
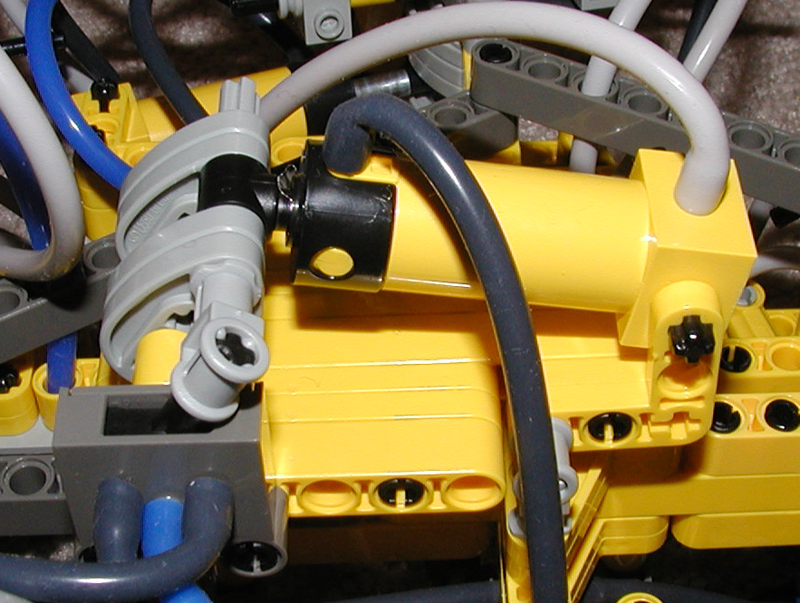
> Here is a closeup of a new piston/switch geometry I've been trying. It reduces
> the amount the large piston can expand or contract, given the way it is hooked
> to the switch. The switch itself constrains the piston. The cams prevent the
> piston from pulling the perpendicular axle connector off the switch:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300003.jpg
> http://www.brickshelf.com/gallery/kclague/hex565/p9300007.jpg
>
> This configuration uses about half the normal throw of a large piston.
How many switches can you move with one cylinder using this method? The
leverage is reduced by 40% so I guess it's 60% of normal or 2 switches if 3 is
normal. I see you have a strong frame to take the force of the piston.
>
> Finally I have a movie:
>
> http://www.kclague.net//hex565/hex565.avi
>
> It takes about 5 seconds to move all the legs forward, and then swep them back.
>
> Please let me know what you think.
>
> Kev
It's great the way you've turned the one-leg-at-a-time concept into a working
MOC. The 5 seconds is almost as quick as the electronic version I saw on TV. I
wonder whether this kind of walker is any different in its capability over rough
terrain than normal walkers.
Will it also work with a four-legged version?
In lugnet.technic, http://news.lugnet.com/technic/?n=14603 Kevin Clague wrote:
> Now I know what to build next..... a four legged walker that lifts one leg
> at a time.
Since you've kept the modularity, the pneumatic circuit should be a doddle, with
5 large cylinders, 16 small cylinders and 21 switches. It's just the weight
bearing that might be more of a challenge, assuming you use the same type of
legs.
Mark
|
|
Message has 2 Replies:
Message is in Reply To:
9 Messages in This Thread:
")  
 
 
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}