Subject:
|
Re: New technique: three position piston control
|
Newsgroups:
|
lugnet.technic, lugnet.robotics
|
Date:
|
Sun, 25 Sep 2005 21:19:57 GMT
|
Viewed:
|
7968 times
|
| |

|
|
In lugnet.technic, Kevin L. Clague wrote:
(SNIP)
> I like to make walkers, so typically I make sequencers (circuits that go through
> a small set of steps, and then repeate themselves). To use this mid-stop piston
> concept in a walker, I needed a way to tell that the piston had stopped in the
> middle.
>
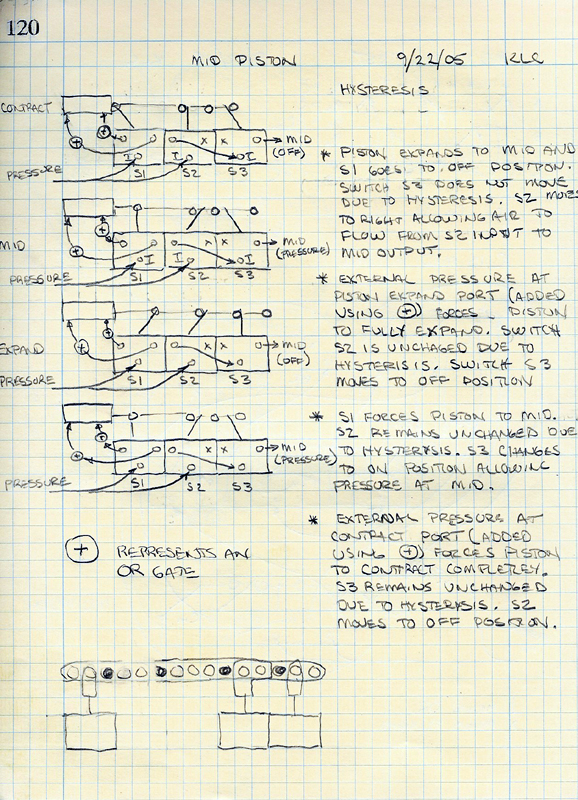
> I realized that to do this, I was going to need to use two switches, and my old
> friend hysteresis. One switch helps us understand that we've traveled from
> contracted to the middle, and the other switch lets us know that we've traveled
> from expanded to the middle. They are set up such that if we've traveled from
> contracted to the middle, and then expanded, then traveled from expanded to the
> middle, both switches will let air pressure flow from their center ports, to one
> of their left or right ports. By hooking these switches together serially we
> know we're in the middle.
>
> Here is a writeup from my LEGO idea logbook on combination of middle stop
> switch, and the middle detect switches:
>
> http://www.brickshelf.com/gallery/kclague/MidPiston/midpiston_descr.jpg
>
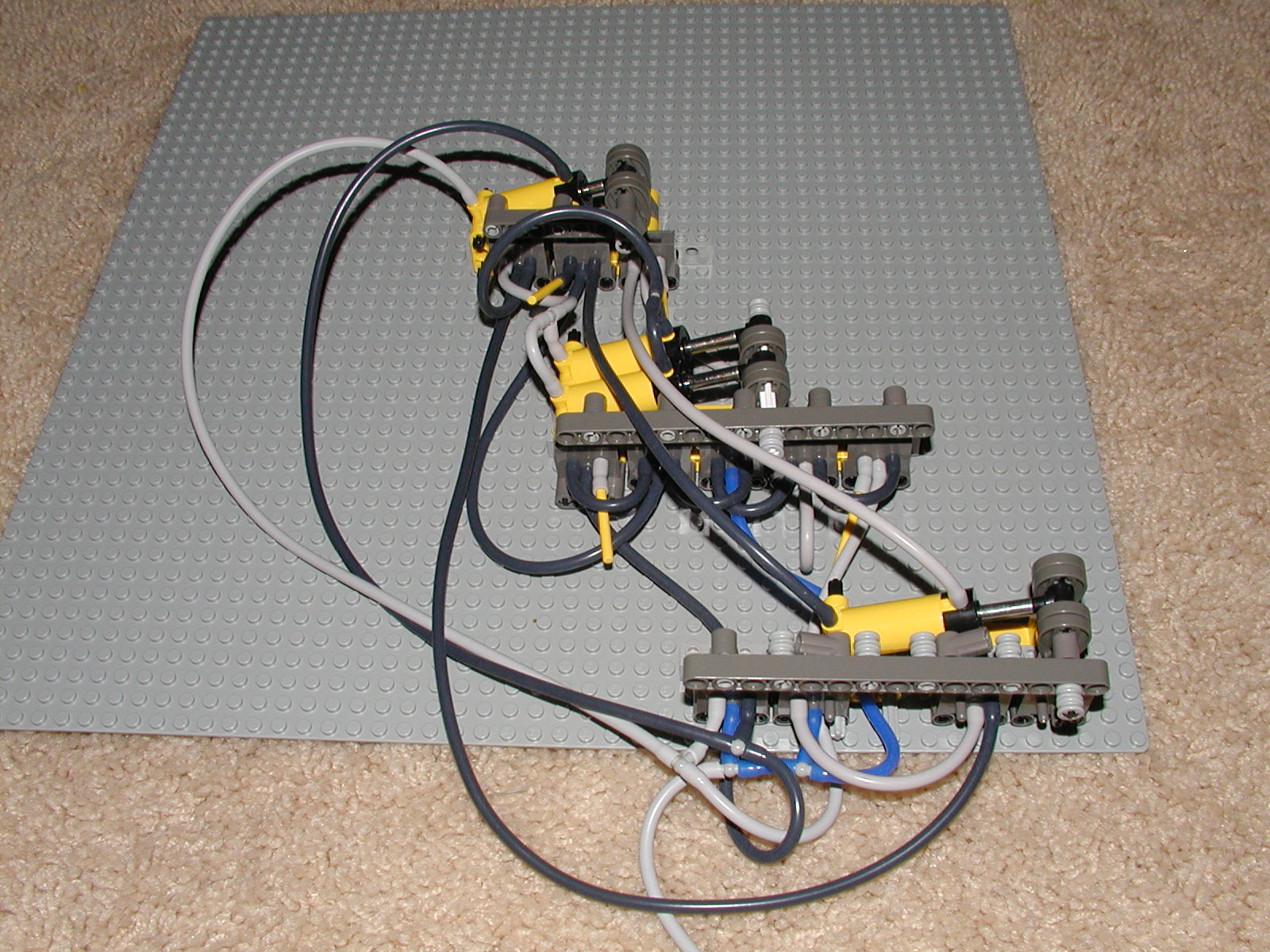
> Here is a close up of an actual implementation of the mid-piston concept used in
> a testbench I created. The switch on the left is actually unused. Notice the
> two switches in the middle, with the #6 angle connectors. These are the
> mid-piston detection switches. The #6 angle connectors, combined with the 1x15
> liftarm, and the technic axle pins with half bushings, provide the hysteresis
> mechanism.
>
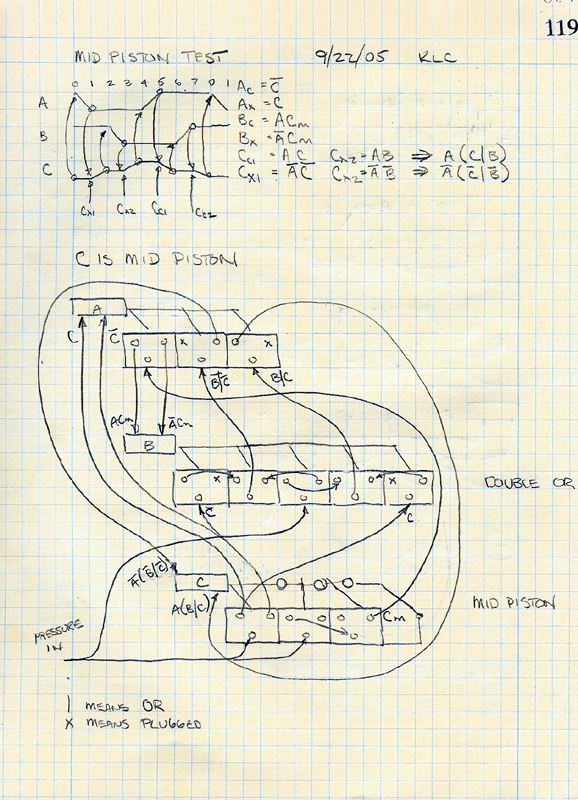
> To be sure that this mechanism actually worked, I created a little pneumatic
> testbench. Logically I used three pistons (four actually, but two were combined
> to act as one). One piston was wrappend in mid stop and mid detection switches,
> the second was wrapped in OR gate switches, and the third was wrapped in AND
> gates to glue them all together.
>
> Here is a writeup from my idea logbook:
>
> http://www.brickshelf.com/gallery/kclague/MidPiston/midtest_schematic.jpg
>
> The timing diagram in the upper left hand corner describes what to expect:
>
> time goes horizontally
> pistons are listed vertically
> up sloping lines means piston expanding
> horizontal lines mean piston unchanged
> down sloping lines mean piston contracting
>
> The critical part of the timing diagram is piston C's waveform:
>
> Notice the piston starts closed, opens to mid, expands fully, contracts to mid,
> and finally contracts fully.
>
> Overall the sequence is:
>
> Piston A contracts.
> Piston C expands to mid
> Piston B contracts
> Piston C expands fully
> Piston A expands
> Piston C contracts to mid
> Piston B expands
> Piston C contracts fully
>
> Here is a photograph of the actual circuit:
>
> http://www.brickshelf.com/gallery/kclague/MidPiston/midpiston_test.jpg
>
> Here is a movie of the circuit in action
>
> http://www.kclague.net/midpiston/mid_piston.avi
>
> Well, that's it! I'd love to hear from anyone who plays with this mid-piston
> concept.
>
> I already have a paper design for a six legged walker with three leg groups
> using forward/mid/back leg sweeps (what a surprise!) It walks using a 9 step
> sequence. It only uses mid-stop on expansion, but not on contraction.
>
> Please let me know what you think.
>
> Kev
Interesting stuff! Should make walkers move more smoothly, with the possibility
of more groups of legs. The trick will then be reversing all the groups, since
it was easier with just two, using two polarity reversers.
I have a centre-stop mechanism for pneumatic steering for a JCB. It's not part
of an automatic system though, since I don't yet have an application for that.
Does your centre stop cylinder stop accurately in the same place every time,
even under different pressure conditions? I thought if you put a lot of source
pressure into the cylinder it might overshoot the mid-point, whereas with low
pressure it would creep up to it. Accurate repeatable positioning is one of the
challenges of this scheme.
Mark
|
|
Message has 2 Replies:
Message is in Reply To:
20 Messages in This Thread:
")   
 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}