| |
Hello people,
I got a bit tired of compiling and uploading programs to a second RCX every
time I need to make a small change (ok, adding the possibility to do
adjustments with the remote control helps a bit), so I decided to make a
win-program that would control the trains directly from the PC using the
USB IR tower. If anyone else thinks they might have use for it, even better
(it is written in C# so it requires .NET, but I guess nowadays it is not an
issue).
Idea:
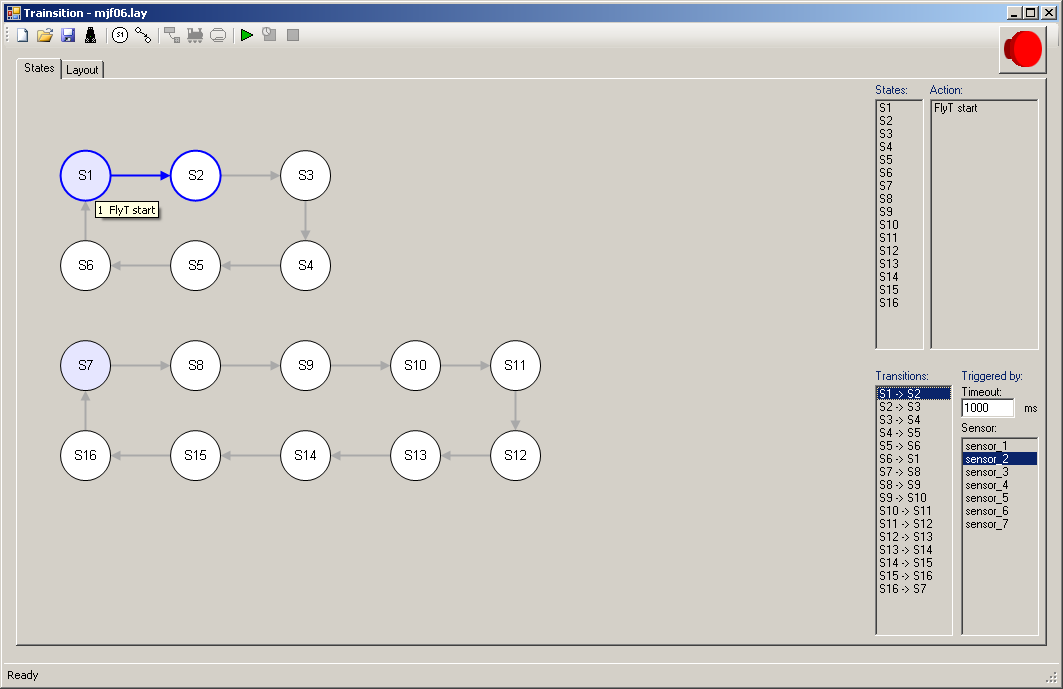
The main idea is that of using states+actions and transitions (hence the
current working title “Trainsition”), while at the same time displaying
the picture of the expected current situation on the layout. Here are two
screenshots of an example layout:


Each state can have several consecutive actions (e.g. loco1 forward at
speed 30 -> wait 3000ms -> loco1 stop) and can then move to the next state.
Transitions are triggered either by a sensor on the layout or by a timer,
and each state can have transitions to more than one other state.
More independent state machines can co-exist and run in parallel (two in
the above example, one for each loop).
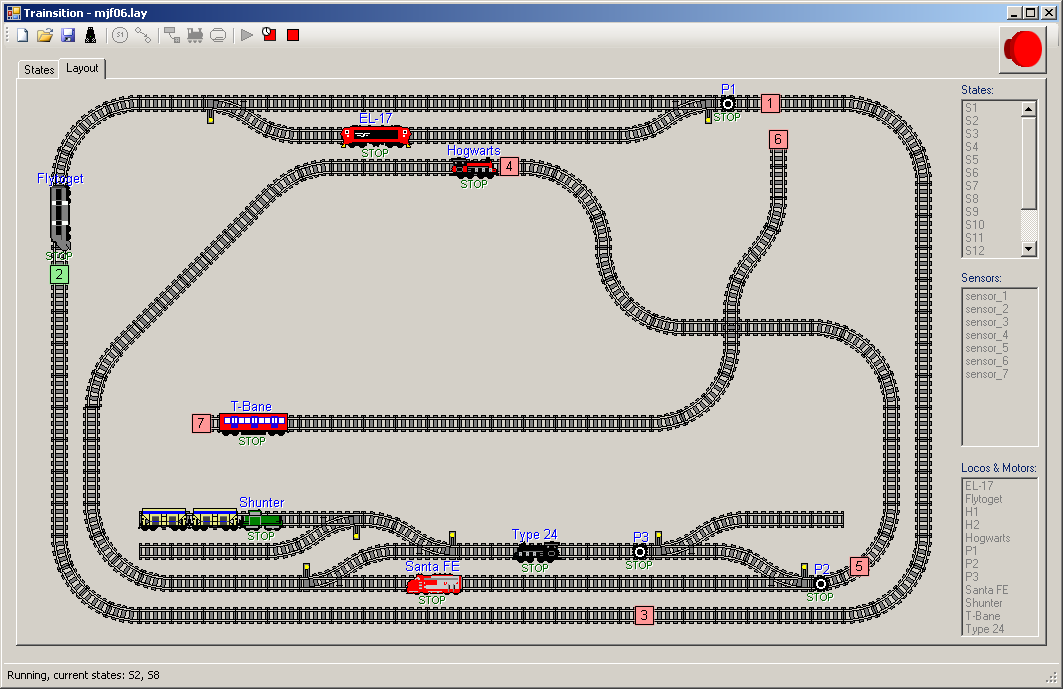
Visual details:
The layout picture can be anything. In the above example I used a
screenshot from the Track Designer, where I altered the background
color to be magenta (default transparency color). The distinction
between locos and non-loco-motors is purely cosmetic (and if someone
has nicer icons for locos/motors, I’ll be happy to change them :) ).
Technicalities:
I plan on making a PIC-based hardware thingy that will gather inputs from up
to 10 sensors (reed switches) and notify the program through the serial port.
Another possibility is to have a second RCX (or more) with sensors, running a
simple program that sends notifications via IR messages.
Since I am quite new to LEGO IR messaging, I need some suggestions in order
not to cause IR chaos - what code and format should I use for the messages?
Should some of it be customizable? As for the contents of the message, I
basically only need to send 1-2 bytes to the IR tower (1 bit per sensor if
all inputs are sent each time, or 1 byte if one message is sent each time
a sensor is pressed). Is there any need for events when sensors are
released, by the way? It was not in the initial plans, but I could consider
adding it.
These are the DCC commands currently supported by the program, let me know
if there are others that might be necessary/useful:
- Setting loco’s direction (fwd, bwd, stop)
- Setting loco’s speed
- Turning on/off a function
Should the program send a power on/off message to LDCC on start/stop?
I plan on putting the possibility to warn the user before actually turning
on power on the tracks, as some of decoders perform a factory reset if they
are on the track at that point.
I still haven’t goot feedback from Mark Riley on whether it soon might be
possible to choose not to send the (standard, but fatal) reset sequence
which seems to be causing that.
Any suggestions are of course more than welcome :)
Cheers,
Matija
FuT lugnet.trains
|
|
Message has 1 Reply:
13 Messages in This Thread:
  ") 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|