Subject:
|
Re: SSClagorpion
|
Newsgroups:
|
lugnet.technic
|
Date:
|
Wed, 5 May 2004 05:17:32 GMT
|
Viewed:
|
16238 times
|
| |

|
|
In lugnet.technic, Steve Hassenplug wrote:
> Here's a quick example of what I'm talking about.
>
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock1.jpg
> http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock2.jpg
>
> Looks like it will work.
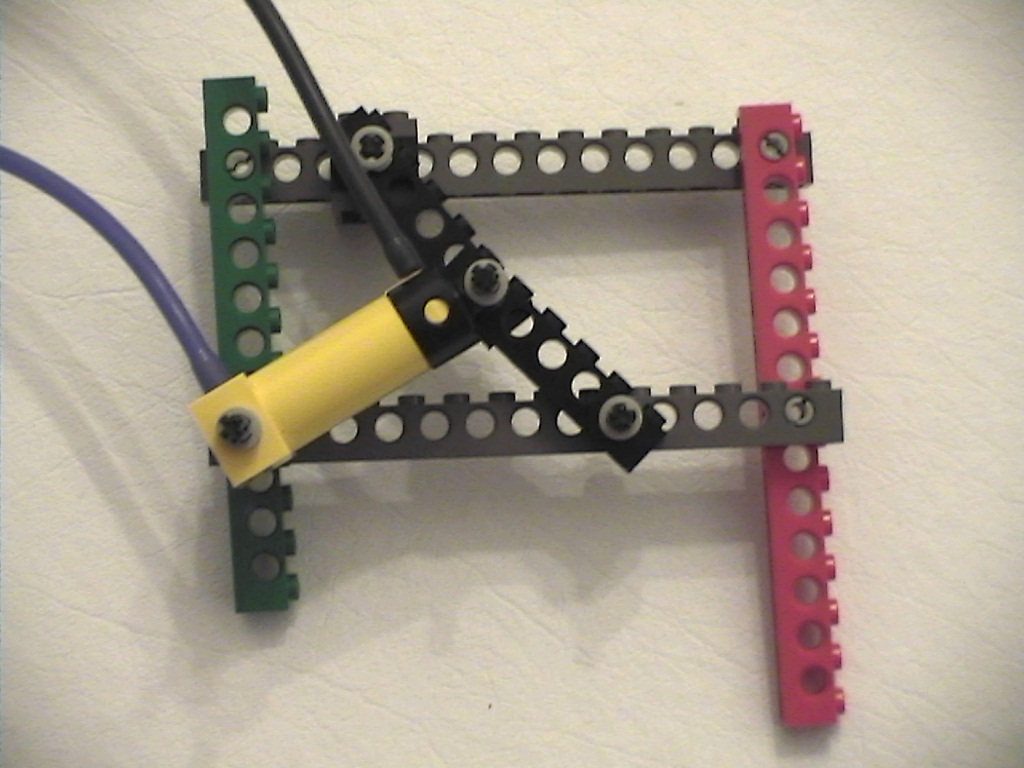
It might not work quite as well as you seem to think. Locking mechanisms of the
sort that you're considering have a little "pop" because they don't lock at
their point of greatest extension. In order to get the leg to lock into
position, it actually has to settle a little bit so the weight prevents the
armature from swinging back into its original position by pulling it in the
opposite direction. Additionally, the legs will probably have a certain amount
of flex when supporting the full weight of this behemoth, so the four moving
legs will actually have to lift the weight entirely off the four locked legs
just as they are shifting into the locked position themselves. Immediately
afterwards, the other four legs will then have to take all the weight back as
they push out of the locked position and pop past the fully extended position,
where the two short struts attached to the cylinder shaft are perfectly lined up
with each other.
Sure, the cylinders won't have to support the weight the entire time, but they
will need to have enough strength to lift it for brief periods. Now, if I
remember my high school physics correctly, the closer the two beams get to being
perfectly parallel, the more leverage you've got to work with, so it's possible
that it won't matter. However, you might also find that any system strong
enough to pop the locks on the legs will be strong enough that it doesn't need
them to begin with. Once you've come up with a leg design that you're happy
with, it might be worth putting together a prototype rig just to test how much
weight it can handle. All you'd need are the basic leg designs with all the
cylinders piped to a simple throw switch (it doesn't need to walk, as long as it
can manage the locking/unlocking parts of the leg movement cycle), and a central
platform that you can set weights on.
|
|
Message has 2 Replies:
 | | Re: SSClagorpion
|
| (...) I thought about this. The two pieces that "lock" don't need to go beyond their point of greatest extension. The reason for going beyond the PoGE is to lock, so nothing else is required to hold it in place. However the pneumatic piston will be (...) (22 years ago, 5-May-04, to lugnet.technic)
|
Message is in Reply To:
300 Messages in This Thread:
(Inline display suppressed due to large size. Click Dots below to view.)
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}