Subject:
|
Re: SSClagorpion
|
Newsgroups:
|
lugnet.technic
|
Date:
|
Wed, 5 May 2004 04:10:06 GMT
|
Viewed:
|
14709 times
|
| |

|
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Steve Hassenplug wrote:
> > In lugnet.technic, Kevin L. Clague wrote:
> > >
> > > Nope. SSClagorpion does not walk using a simple pneumatic motor configuration.
> >
> >
> >
> > I just came up with an idea for how to make the legs work. It should make it so
> > the pneumatic cylinder doesn't have to support the weight of the creature.
> >
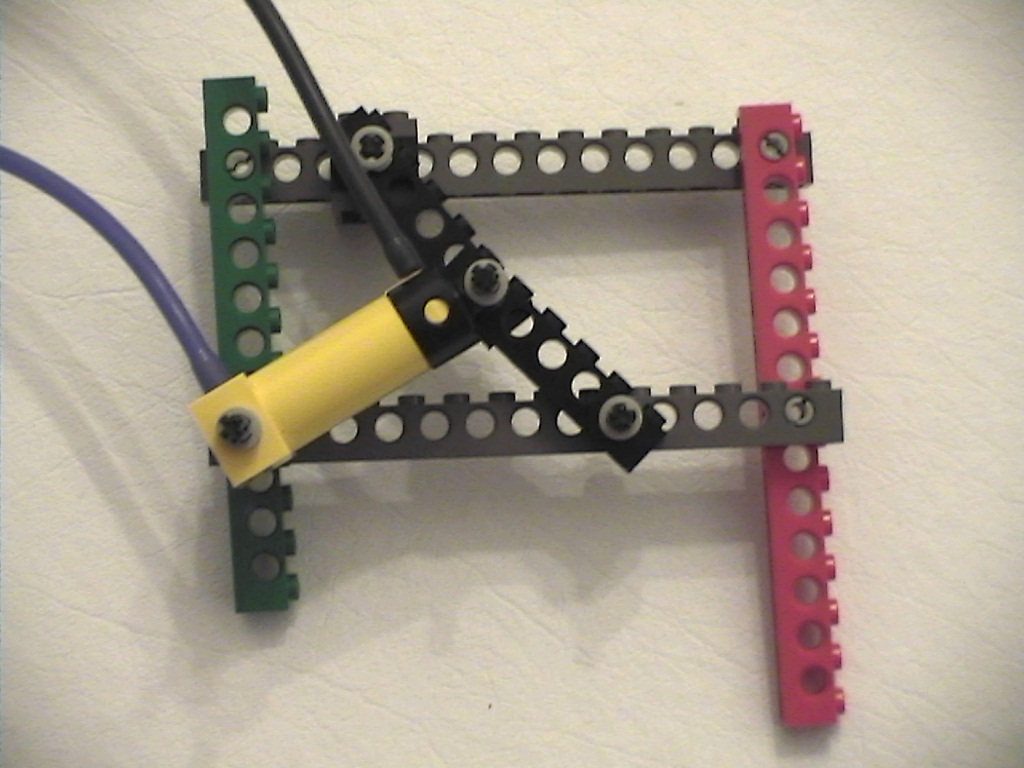
> > The idea is to have the legs "lock" into place, when they are down.
>
> This eliminates the concerns about piston leverage for putting the feet down and
> keeping them weight bearing.
Here's a quick example of what I'm talking about.
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock1.jpg
http://www.brickshelf.com/gallery/Hassenplug/Robots/SSClagorpion/leglock2.jpg
Looks like it will work.
|
|
Message has 1 Reply:
 | | Re: SSClagorpion
|
| (...) It might not work quite as well as you seem to think. Locking mechanisms of the sort that you're considering have a little "pop" because they don't lock at their point of greatest extension. In order to get the leg to lock into position, it (...) (22 years ago, 5-May-04, to lugnet.technic)
|
Message is in Reply To:
| | Re: SSClagorpion
|
| (...) This eliminates the concerns about piston leverage for putting the feet down and keeping them weight bearing. This allows us to have the legs be longer, more like a real scorpion, but this brings us to the next leverage problem: (...) (22 years ago, 5-May-04, to lugnet.technic)
|
300 Messages in This Thread:
(Inline display suppressed due to large size. Click Dots below to view.)
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|

{kind=link}
{kind=link}