| |
In lugnet.technic, Philippe Hurbain writes:
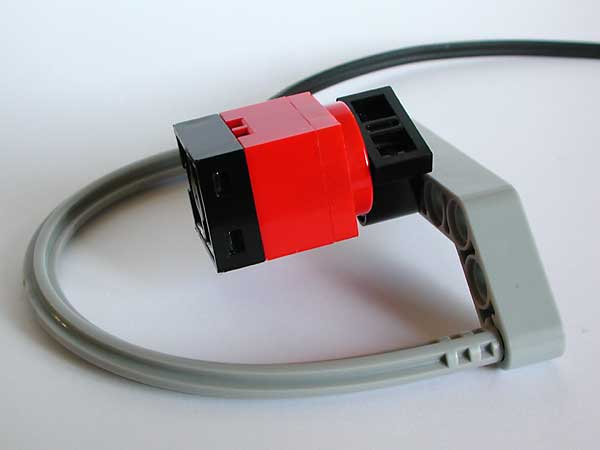
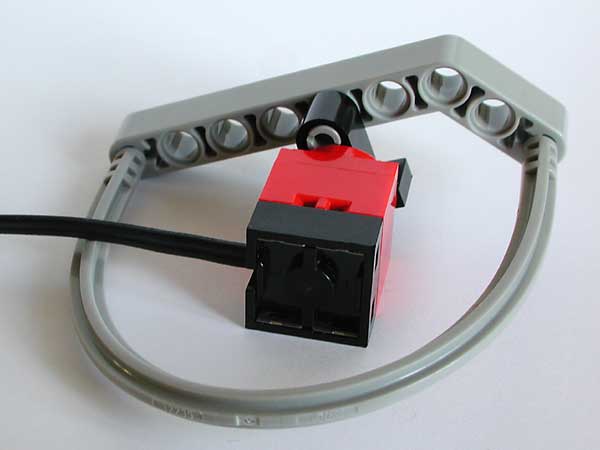
> ...and then they were five...
>
> The 1x7 liftarm is a bit short and the motor bumps against the flexible axle.
> So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor bottom.
> I used a 1x2 liftarm with plate only for aestetical reasons...
>
> Photos:
> http://www.philohome.com/misc/monopod5a.jpg
> http://www.philohome.com/misc/monopod5b.jpg
> http://www.philohome.com/misc/monopod5c.jpg
> Small QuickTime movie:
> http://www.philohome.com/misc/monopod5b.mov (200KB)
>
> I guess it will be hard to get a lower part count ;o)
>
> Philo
> www.philohome.com
Very cool!
Thanks for trying out the design for me, I would have worked on it myself,
but I'm glad you could help me out. I'm wondering, did the design with 7
pieces get its foot totally off the ground? I think lego is actually making
a two-long liftarm now, but I used the closest thing I had. I'm also
wondering if it would be okay with you if I used some of your pictures for
my gallery at brickshelf, since I can't take any right now.
Thanks again,
jrl
|
|
Message is in Reply To:
 | | Re: baby walker
|
| ...and then they were five... The 1x7 liftarm is a bit short and the motor bumps against the flexible axle. So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor bottom. I used a 1x2 liftarm with plate only for aestetical reasons... (...) (23 years ago, 5-Apr-03, to lugnet.technic, lugnet.robotics)
|
43 Messages in This Thread:

 
 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}