| |
after watching that film, i got to say that this is fun but its totally not
a walker. first foremost for that leg drag, I'd rename this Igor or
somthing.
-tk
"Philippe Hurbain" <philohome@free.fr> wrote in message
news:HCvtts.nF@lugnet.com...
> ...and then they were five...
>
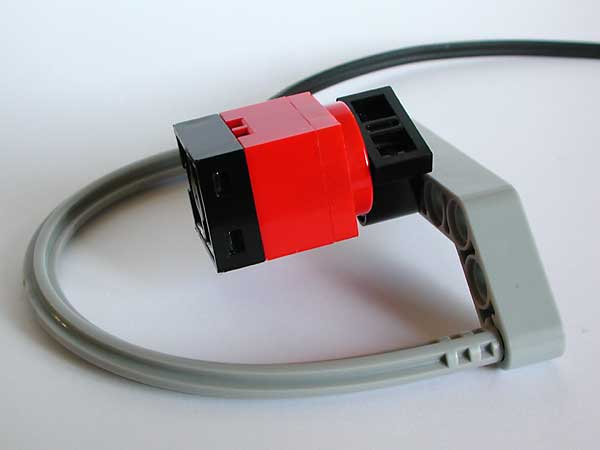
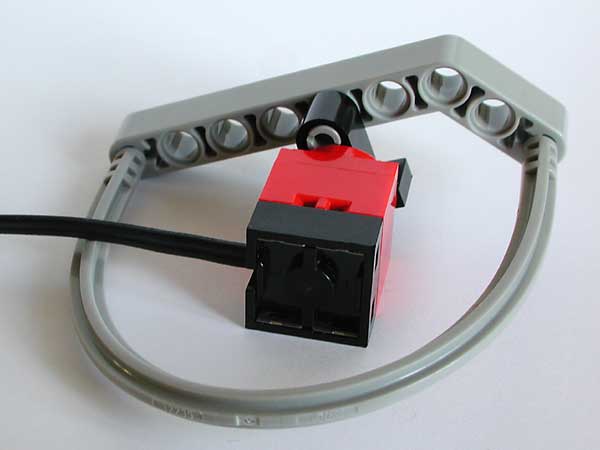
> The 1x7 liftarm is a bit short and the motor bumps against the flexible • axle.
> So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor • bottom.
> I used a 1x2 liftarm with plate only for aestetical reasons...
>
> Photos:
> http://www.philohome.com/misc/monopod5a.jpg
> http://www.philohome.com/misc/monopod5b.jpg
> http://www.philohome.com/misc/monopod5c.jpg
> Small QuickTime movie:
> http://www.philohome.com/misc/monopod5b.mov (200KB)
>
> I guess it will be hard to get a lower part count ;o)
>
> Philo
> www.philohome.com
>
> > Cool! I figured that the stiffness of the wire would help. I guess I'll • call
> > it Shorty ,as it's only a little over an inch tall :). Now I've just got • to
> > get that micro motor ordered so I can try it out myself. I'm wondering if
> > you could try out a slightly different design for me. It wouldn't use the
> > block under the motor (because as you said, the wire helps more than it
> > does) and it would use a 1x7 bent liftarm connected to a 16 long flexible
> > axle or flex hose of similar length. You could try it without a brick • under
> > the motor or with a 2x2 plate there. If you could let me know how it • works
> > out, I'd appreciate it.
> >
> > Thanks,
> >
> > jrl
|
|
Message is in Reply To:
 | | Re: baby walker
|
| ...and then they were five... The 1x7 liftarm is a bit short and the motor bumps against the flexible axle. So I used a 1x9 (7+2) to be low enough, and I could remove Micromotor bottom. I used a 1x2 liftarm with plate only for aestetical reasons... (...) (23 years ago, 5-Apr-03, to lugnet.technic, lugnet.robotics)
|
43 Messages in This Thread:

 
 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}