| |
Philippe Hurbain wrote:
> As I wanted to play with your design (and if possible decrease the number of L7
> axles still relatively scarce in my collection...), I modelled it using
> <http://www.euklides.hu/eng/euklides.htm Euklides 2.02 geometry freeware>.
>
> <<http://www.brickshelf.com/gallery/Philo/Misc/tj.gif>>
>
> Euklides file is [<http://www.brickshelf.com/gallery/Philo/Misc/tj2.euk here>].
>
> You can animate the leg by moving the handle. Play with different geometries by
> changing segment lengths on the right.
>
> The black curve shows the path of the tip of the leg. A broken or strange curve
> indicates impossible geometries.
>
> Play well,
>
> Philo
I wanted to say thank you for your kind words; I also should add that I
routinely use your page as a guide when thinking about lego motors.
http://www.philohome.com/motors/motorcomp.htm
As to the simulation. It is simply fantastic. I played with it for a
short while, and all I can say, is that it sure would have been helpful
to me to have that before I used my "trial and error" to work on the
prototype leg.
:)
Regards
Chris
|
|
| |
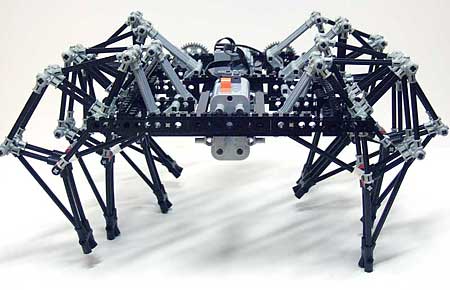
I went on and built my own version, using 8 legs with 90° phase offset and Power
Functions motorization. Still a few things to improve, such as the bad balance
due to the weight of the battery pack...
See it here.
Thanks again for the building incentive ;o)
Philo
|
|
| |
>
> Thats a nice walker. Great job, now I want to place a brickshelf order
> so i can get more 7L axles. :)
>
> May I ask why you went with a longer axle at the "front" of the leg? As
> opposed to making it a "square" design.
I fiddled with lengths in Euklides till I got a reasonnably flat and horizontal
path for the foot, while keeping axle lengths even, and came up with this one.
After building I had again a closer look at this other simulation:
http://www.mechanisms101.com/theo_jansen.shtml, the bottom of the curve is much
flatter. This comes to a price: the descending part of the curve is almost
tangent to the ground, making it more prone to stumble. Probably the way to go
for low power design, such as the solar version discussed with Brian.
> Also, great idea on the IR motors for the walker. I wanted to try that
> as well, when Janey first suggested it to me, but alas, I am short on
> the new power function motors. :)
Yes, this system is really great... That said, if you go on the solar version
the old 71427 is much better regarding efficiency!
Philo
|
|
| |
Philippe Hurbain wrote:
> <http://www.philohome.com/theo/walker.htm<http://www.philohome.com/theo/w1-t.jpg>>
>
> I went on and built my own version, using 8 legs with 90° phase offset and Power
> Functions motorization. Still a few things to improve, such as the bad balance
> due to the weight of the battery pack...
>
> See it [<http://www.philohome.com/theo/walker.htm here>].
>
> Thanks again for the building incentive ;o)
>
> Philo
Thats a nice walker. Great job, now I want to place a brickshelf order
so i can get more 7L axles. :)
May I ask why you went with a longer axle at the "front" of the leg? As
opposed to making it a "square" design.
Also, great idea on the IR motors for the walker. I wanted to try that
as well, when Janey first suggested it to me, but alas, I am short on
the new power function motors. :)
Chris
|
|
|
{kind=link}