Subject:
|
Re: Hex565 - one leg at at time pneumatic hexapod
|
Newsgroups:
|
lugnet.technic, lugnet.robotics
|
Date:
|
Tue, 4 Oct 2005 21:14:11 GMT
|
Viewed:
|
1033 times
|
| |

|
|
In lugnet.technic, Mark Bellis wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > Over the last few weeks, I've been working on a pneumatic hexapod that moves one
> > leg at a time.
> >
> > I got it working this morning. It is pretty cool.
> >
> > It uses 7 large pistons (six for making the legs move forward/backward) and one
> > for controling the stride that moves the body forward.
> >
> > It uses 24 small pistons. Each leg requires two switches to determine when a
> > leg is up and down. My standard ratio is two small pistons per switch. Each
> > group of four small pistons could be easily replaced with a single large piston.
>
> That's good - not many of us have that many small pistons! I wish TLG would
> bring them out in a set again.
These days I buy my small pistons from Dacta. Last time I checked, they had a
combo pack of small pump, small piston and three short hoses (black, grey and
blue) for $10. I bought most of my small pistons that way (30).
>
> I remember when they used to be available as spare parts they cost as much as a
> large piston. 31 pistons and 32 switches is a similar cost to my 19 pistons and
> 44 switches, though your alternative of 13 pistons and 32 switches looks
> attractive.
Yes, the 31 piston solution is a bit expensive, but I wanted to see how small
pistons would work for leg lift/drop, since they are so quick.
My original estimate for pistons was about right 2N+1, but I was off on
switches. I wanted to build one to make sure I wasn't just full of hot air. I
guess I was only half full :^)
> >
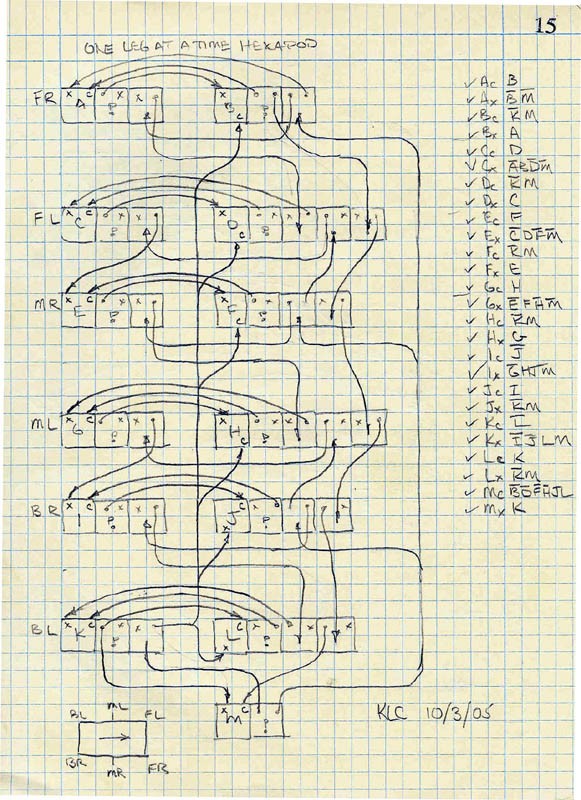
> > Here is the timing diagram used to design the circuit.
> >
> > http://www.brickshelf.com/gallery/kclague/hex565/timing.jpg
> >
> > Here is a schematic for the circuit:
> >
> > http://www.brickshelf.com/gallery/kclague/hex565/schematic.jpg
> >
> > It is one of the bigger circuits I've made. It took a bit to debug.
>
> I see you've kept the modular capability, enabling the adding or subtracting of
> legs in pairs. Getting rid of the master loop circuit from my earlier design
> has helped reduce the component count (since I see you reduced it by about n
> pistons and 2n switches).
I just don't do master loops any more. All they do is add expense. Occasionaly
I need pistons that are just for timing (like the one lone piston not in legs
that is used to keep track of "end of cycle" vs the rest of the walking
pattern.)
Wherever possible I try to use muscle pistons as timing pistons.
> >
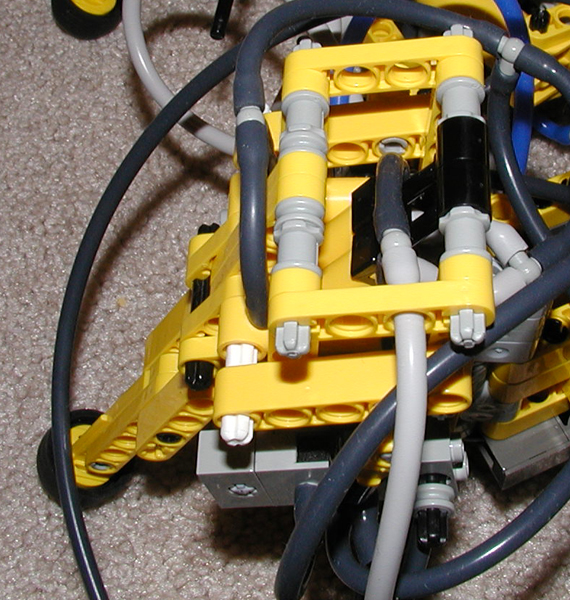
> > Here is a picture of the entire model:
> >
> > http://www.brickshelf.com/gallery/kclague/hex565/p9300001.jpg
> >
> > Here is the busy underside:
> >
> > http://www.brickshelf.com/gallery/kclague/hex565/p9300006.jpg
> >
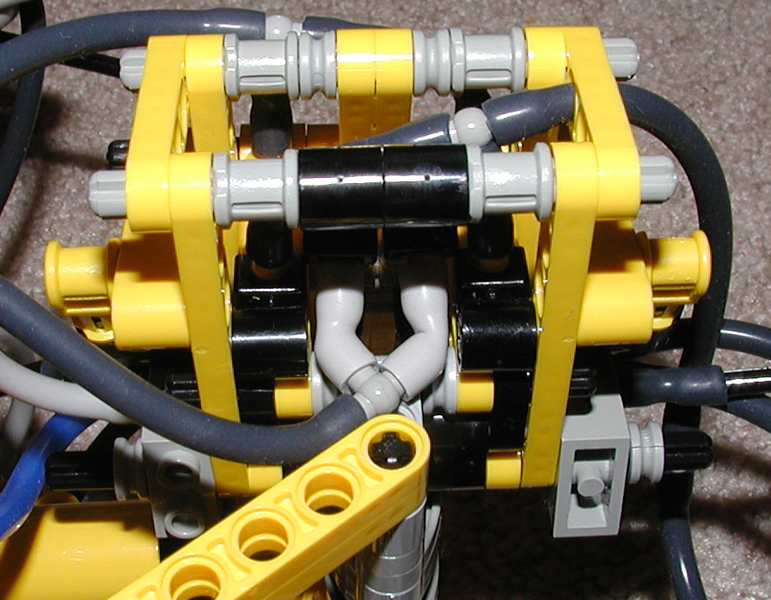
> > Here are pictures of the leg lift/drop mechanism. The legs have a cute leg lock
> > mechanism driven by the horizontal small pistons.
> >
> > http://www.brickshelf.com/gallery/kclague/hex565/p9300004.jpg
> > http://www.brickshelf.com/gallery/kclague/hex565/p9300005.jpg
> >
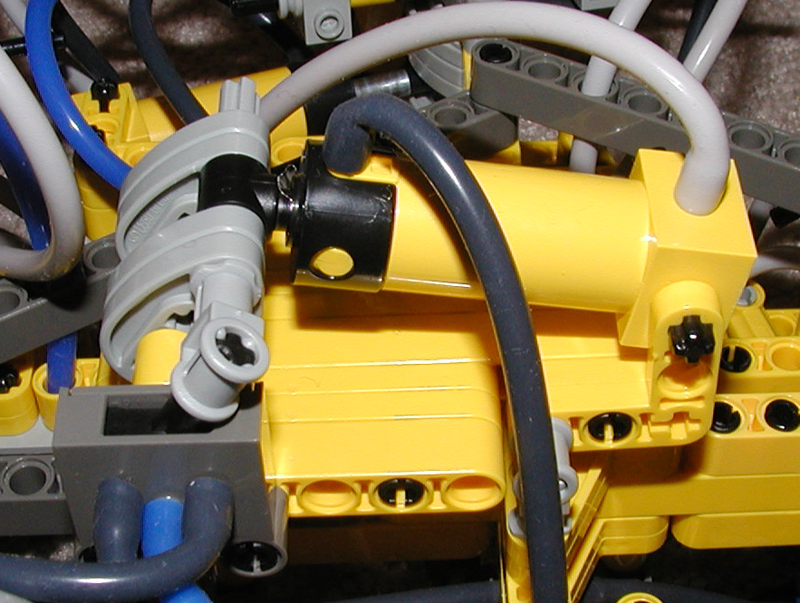
> > Here is a closeup of a new piston/switch geometry I've been trying. It reduces
> > the amount the large piston can expand or contract, given the way it is hooked
> > to the switch. The switch itself constrains the piston. The cams prevent the
> > piston from pulling the perpendicular axle connector off the switch:
> >
> > http://www.brickshelf.com/gallery/kclague/hex565/p9300003.jpg
> > http://www.brickshelf.com/gallery/kclague/hex565/p9300007.jpg
> >
> > This configuration uses about half the normal throw of a large piston.
>
> How many switches can you move with one cylinder using this method? The
> leverage is reduced by 40% so I guess it's 60% of normal or 2 switches if 3 is
> normal. I see you have a strong frame to take the force of the piston.
I have not studied this yet. The force provided by the piston is the same, but
as you indicate, the leverage is what is different. I typically use up to four
switches per large piston, so I should be able to drive two easily.
The volume reduction is nice though.....
I used to use a different geometry:
Switch+axle-connector(two studs long with both axles on the same axis) + #2
axle and a #1 angle connector, adding a length three to the switch lever. This
would barely push the switch to its limits. When used under load, things would
sometimes lock up because the load would stress the geometry.
For SSclagorpion, I switched to #1 angle connector adding a length one to the
lever. A large piston wants to expand/contract farther than the throw provided,
but I use cams plus 1x2 thin liftarm, trapped by 3x5 L to stop if from tearing
itself apart.
Wherever possible I'll use the "Axle connector perpendicular" to run things to
reduce the total volume of air needed.
I'm doing a local cable access show on my walkers/crawlers in a few weeks.
After that I want to remodel my quad, hex, oct, and inchworm to use these newer
, more reliable piston+switch geometries.
> >
> > Finally I have a movie:
> >
> > http://www.kclague.net//hex565/hex565.avi
> >
> > It takes about 5 seconds to move all the legs forward, and then swep them back.
> >
> > Please let me know what you think.
> >
> > Kev
>
> It's great the way you've turned the one-leg-at-a-time concept into a working
> MOC. The 5 seconds is almost as quick as the electronic version I saw on TV.
Thanks! I had already worked a lot on the leg design to make such a compact
locking mechanism.
> I
> wonder whether this kind of walker is any different in its capability over rough
> terrain than normal walkers.
I wondered about that too. With the one-at-a-time hex, you have all six leg
pistons thrusting the body forward at a time. With two groups of three, you
only have three pistons doing the work. With three groups of two (using
mid-stop) you get four pistons doing the work.
Maybe the one-at-a-time advantage is heavy lifting.
One nice thing is that the leg lift/leg forward/leg drop is pretty quick, given
that you are only applying pressure and losing volume one leg at a time.
>
> Will it also work with a four-legged version?
I had a paper design already, but I have to revise it based on what I learned
with the hex.
> In lugnet.technic, http://news.lugnet.com/technic/?n=14603 Kevin Clague wrote:
> > Now I know what to build next..... a four legged walker that lifts one leg
> > at a time.
> Since you've kept the modularity, the pneumatic circuit should be a doddle, with
> 5 large cylinders, 16 small cylinders and 21 switches. It's just the weight
> bearing that might be more of a challenge, assuming you use the same type of
> legs.
>
> Mark
If you watch the movie carefully you see that the body drops some on the last
two legs. This has to do with how far forward the feet are when the legs are in
their forward position.
I can rectify this by using longer levers for leg forward/backward control, thus
reducing the travel of the foot.
Possibly a different leg order would help too.
With four you'd need to be extra careful..... and have even less foot travel (or
big enough feet to compensate.)
I wonder about five? Radial symmetry for five might be the big challenge. I'll
have to watch star-fish travel.
I'll doodle up four. We'll see if the 2N+1/5*n+2 formula holds. I suspect that
the switch formula will be off by 1 or 2 switches is all. Notice that the first
two legs are cheaper that the middle two legs (as is also true for the last two
legs vs the middle). Boundary conditions can provide economy I guess.
Thanks for the thoughtful feedback.
Kev
|
|
Message is in Reply To:
9 Messages in This Thread:
")  
 
 
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}