Subject:
|
Re: Hex565 - one leg at at time pneumatic hexapod
|
Newsgroups:
|
lugnet.technic, lugnet.robotics
|
Date:
|
Wed, 5 Oct 2005 00:28:50 GMT
|
Viewed:
|
8032 times
|
| |

|
|
In lugnet.technic, Kevin L. Clague wrote:
> Over the last few weeks, I've been working on a pneumatic hexapod that moves one
> leg at a time.
>
> I got it working this morning. It is pretty cool.
I'll say! Now I also say, "I get it!"
I had to stare and read pretty hard.
I'll send you my advil bill.
(lol)
> It uses 7 large pistons (six for making the legs move forward/backward) and one
> for controling the stride that moves the body forward.
Oooohhh Ya, I like that.
> It uses 24 small pistons. Each leg requires two switches to determine when a
> leg is up and down. My standard ratio is two small pistons per switch. Each
> group of four small pistons could be easily replaced with a single large piston.
Amazing! Short vowels.
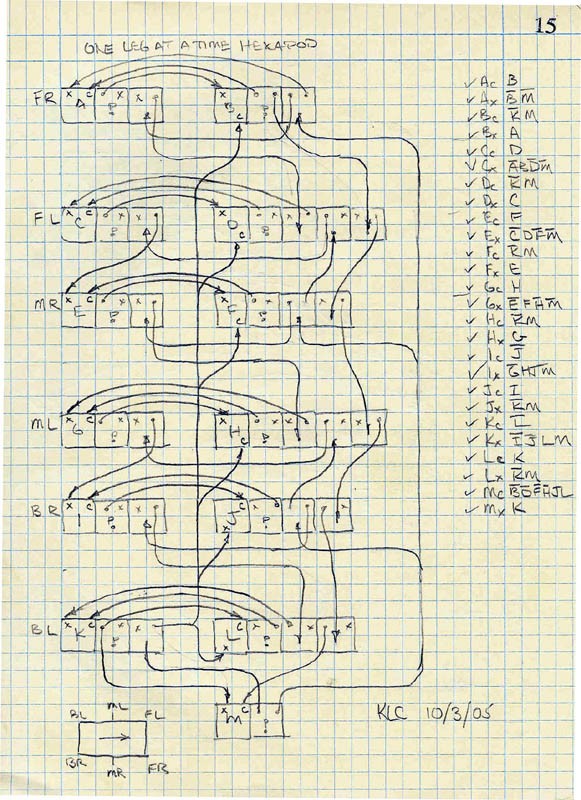
> Here is the timing diagram used to design the circuit.
>
> http://www.brickshelf.com/gallery/kclague/hex565/timing.jpg
OMG, 800 milligrams.
> Here is a schematic for the circuit:
>
> http://www.brickshelf.com/gallery/kclague/hex565/schematic.jpg
Needed cold compress. Brilliant.
> It is one of the bigger circuits I've made. It took a bit to debug.
>
> Here is a picture of the entire model:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300001.jpg
Faciniating, even if I don't hold an A7 ranking.
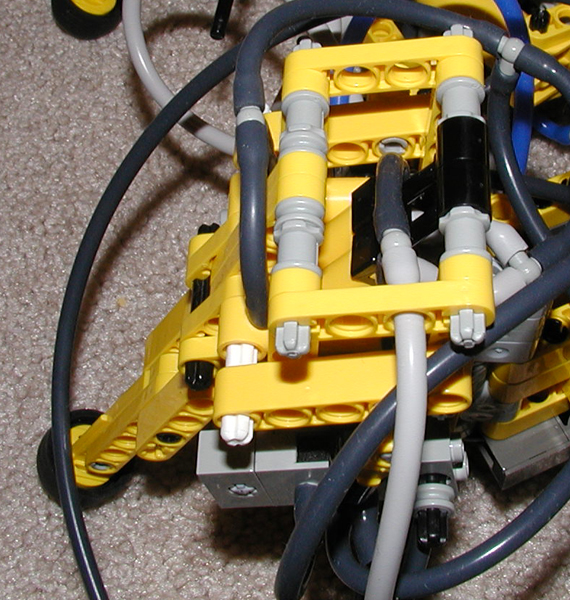
> Here is the busy underside:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300006.jpg
This shot is very helpful. Assuming you have taken advil.
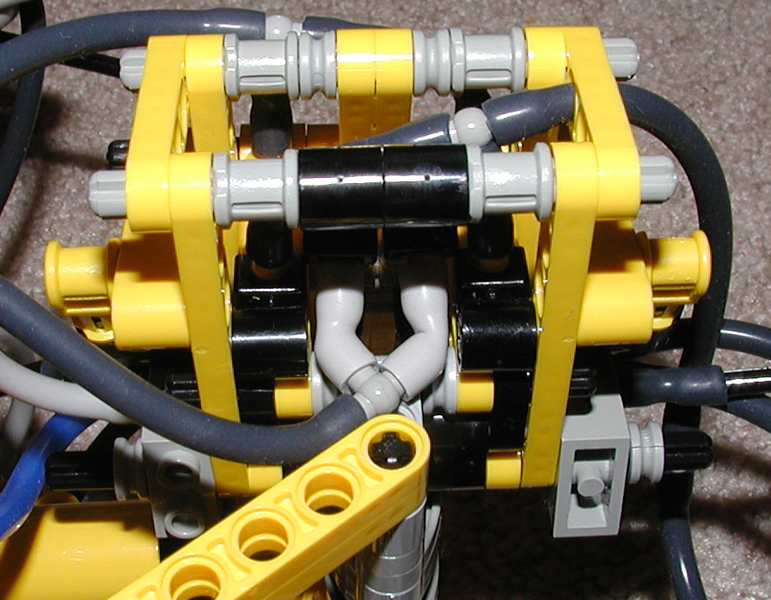
> Here are pictures of the leg lift/drop mechanism. The legs have a cute leg lock
> mechanism driven by the horizontal small pistons.
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300004.jpg
> http://www.brickshelf.com/gallery/kclague/hex565/p9300005.jpg
NOW That rocks.
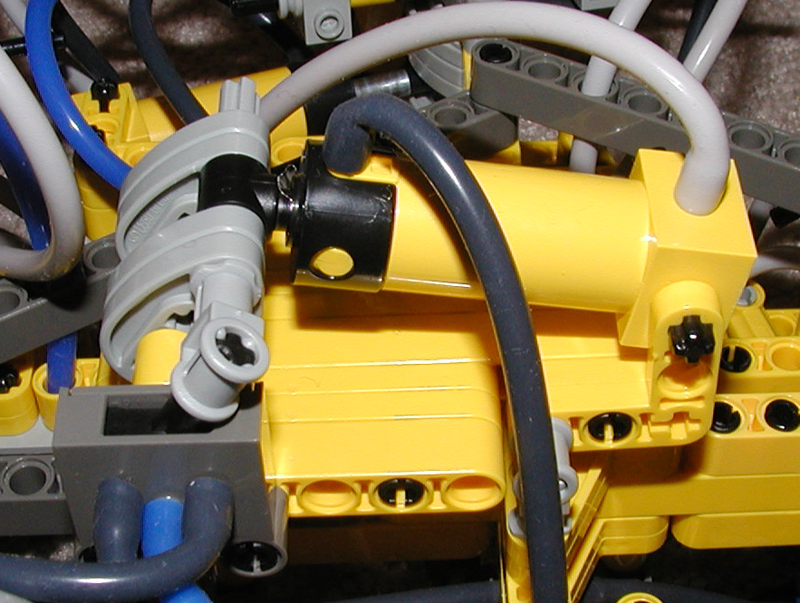
> Here is a closeup of a new piston/switch geometry I've been trying. It reduces
> the amount the large piston can expand or contract, given the way it is hooked
> to the switch. The switch itself constrains the piston. The cams prevent the
> piston from pulling the perpendicular axle connector off the switch:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300003.jpg
> http://www.brickshelf.com/gallery/kclague/hex565/p9300007.jpg
Ahhhhh Haaaaa, and you explained in English, I love it. This is integral.
> This configuration uses about half the normal throw of a large piston.
Still the volume of air is what counts, not the size or rather the length of the
throw. (please humor me and pretend I know what I'm talking about.) Have pitty.
> Finally I have a movie:
>
> http://www.kclague.net//hex565/hex565.avi
Yay!
> It takes about 5 seconds to move all the legs forward, and then swep them back.
>
> Please let me know what you think.
>
> Kev
Kev, I think this is Uuum Badda Bad - go big Badda Boom.
Excepting the fact that it is ugly, your continued application evolution
astounds. Blend your machines with organics. Couple of monkey arms and your
good.
Just teasing your pure mechanics.
You sir are the Pnuemo King.
Exciting and inovative work. Thank you!
e
|
|
Message has 1 Reply:
Message is in Reply To:
9 Messages in This Thread:
") 
 
  
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}