Subject:
|
Re: Hex565 - one leg at at time pneumatic hexapod
|
Newsgroups:
|
lugnet.technic, lugnet.robotics
|
Date:
|
Wed, 5 Oct 2005 23:22:28 GMT
|
Viewed:
|
8510 times
|
| |

|
|
On 04/10/05, Kevin L. Clague <kevin_clague@yahoo.com> wrote:
> Over the last few weeks, I've been working on a pneumatic hexapod that moves
> one
> leg at a time.
>
> I got it working this morning. It is pretty cool.
>
> It uses 7 large pistons (six for making the legs move forward/backward) and
> one
> for controling the stride that moves the body forward.
>
> It uses 24 small pistons. Each leg requires two switches to determine when a
> leg is up and down. My standard ratio is two small pistons per switch. Each
> group of four small pistons could be easily replaced with a single large
> piston.
>
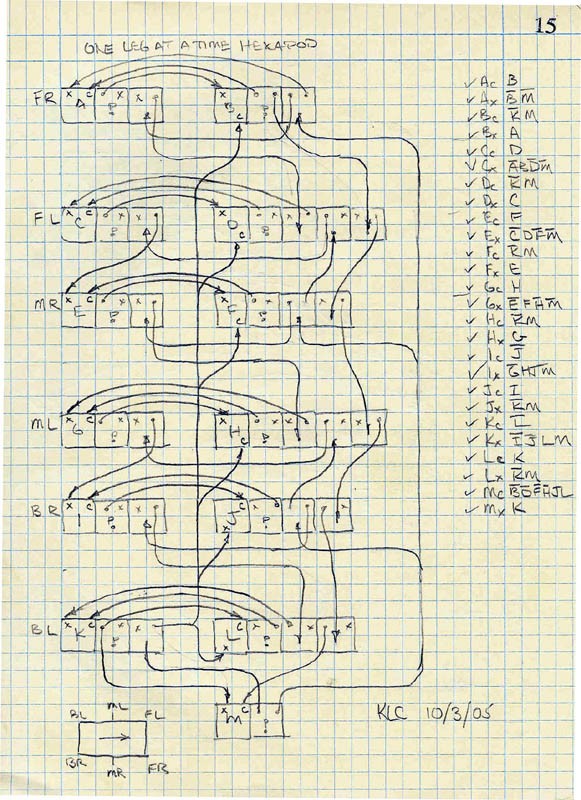
> Here is the timing diagram used to design the circuit.
>
> http://www.brickshelf.com/gallery/kclague/hex565/timing.jpg
>
> Here is a schematic for the circuit:
>
> http://www.brickshelf.com/gallery/kclague/hex565/schematic.jpg
>
> It is one of the bigger circuits I've made. It took a bit to debug.
>
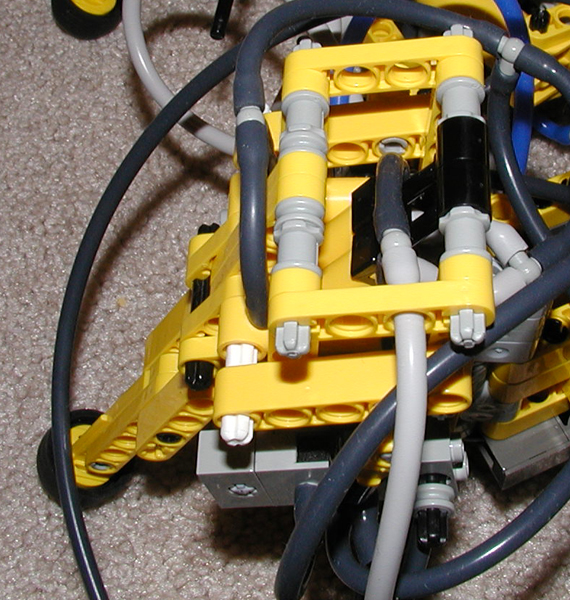
> Here is a picture of the entire model:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300001.jpg
>
> Here is the busy underside:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300006.jpg
>
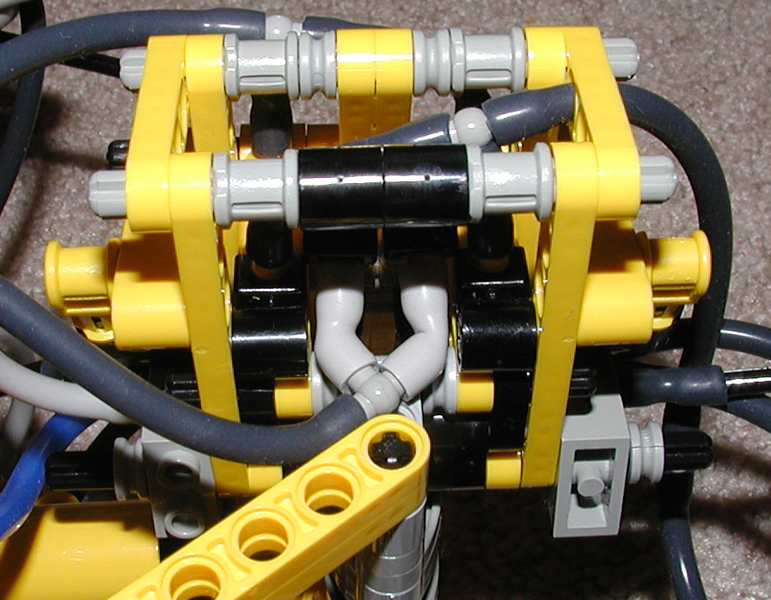
> Here are pictures of the leg lift/drop mechanism. The legs have a cute leg
> lock
> mechanism driven by the horizontal small pistons.
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300004.jpg
> http://www.brickshelf.com/gallery/kclague/hex565/p9300005.jpg
>
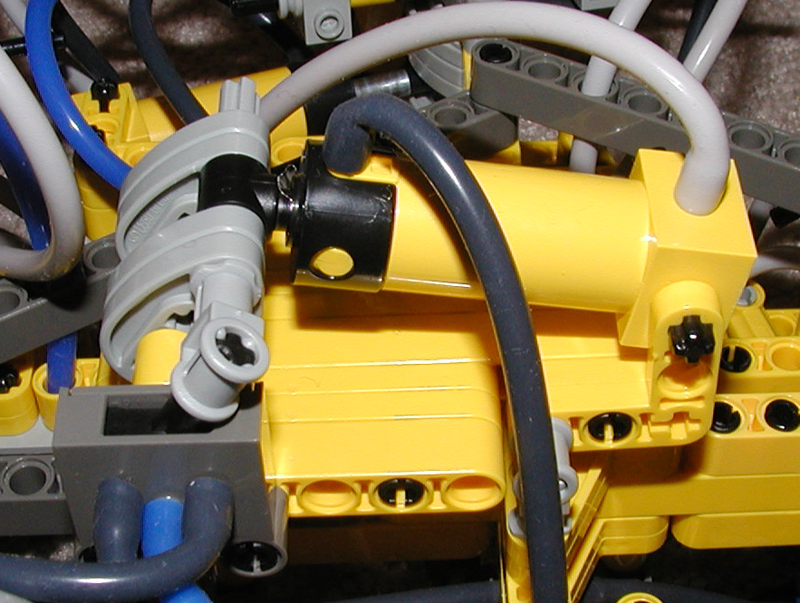
> Here is a closeup of a new piston/switch geometry I've been trying. It
> reduces
> the amount the large piston can expand or contract, given the way it is hooked
> to the switch. The switch itself constrains the piston. The cams prevent the
> piston from pulling the perpendicular axle connector off the switch:
>
> http://www.brickshelf.com/gallery/kclague/hex565/p9300003.jpg
> http://www.brickshelf.com/gallery/kclague/hex565/p9300007.jpg
>
> This configuration uses about half the normal throw of a large piston.
>
> Finally I have a movie:
>
> http://www.kclague.net//hex565/hex565.avi
>
> It takes about 5 seconds to move all the legs forward, and then swep them
> back.
>
> Please let me know what you think.
>
> Kev
That is a joy to watch. Even if it is slower than some other gait, it
is very interesting to watch. I have vaguely followed your pneumatic
threads, watching the cool diagrams and devices, but I will admit you
lost me a while back with this. You and mark are clearly the masters
of Lego pneumatics.
My efforts have only ever gone as far as building small compressors
and a two cylinder reciprocating "engine". I may have to try a basic
penumatic walker though - you guys have intrigued me. I am also
limited by the fact that I probably do not have any where near that
number of switches, or pistons - mine barely make double figures.
Its a pity there is no sound on that video. You may find that some
people with slipstreamed SP1 windows have trouble viewing it - indeo
codec is no longer shipped with windows, and costs a few bob!
Orionrobots
--
http://orionrobots.co.uk - Build Robots
|
|
Message has 1 Reply:
Message is in Reply To:
9 Messages in This Thread:
") 
 
 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}