Over the last few weeks, I've been working on a pneumatic hexapod that moves one
leg at a time.
I got it working this morning. It is pretty cool.
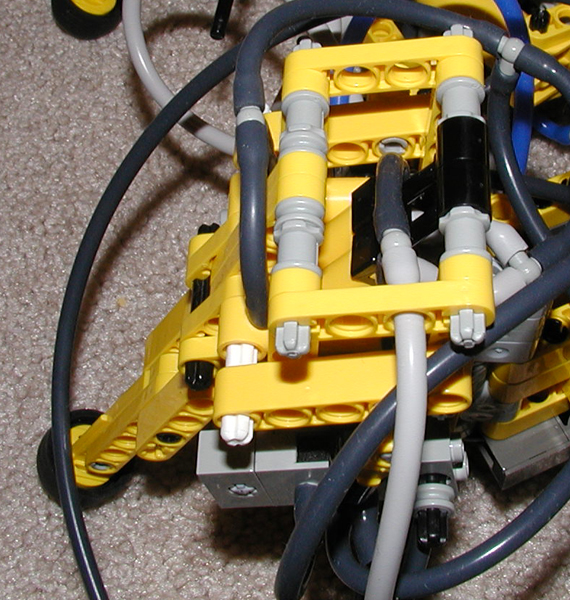
It uses 7 large pistons (six for making the legs move forward/backward) and one
for controling the stride that moves the body forward.
It uses 24 small pistons. Each leg requires two switches to determine when a
leg is up and down. My standard ratio is two small pistons per switch. Each
group of four small pistons could be easily replaced with a single large piston.
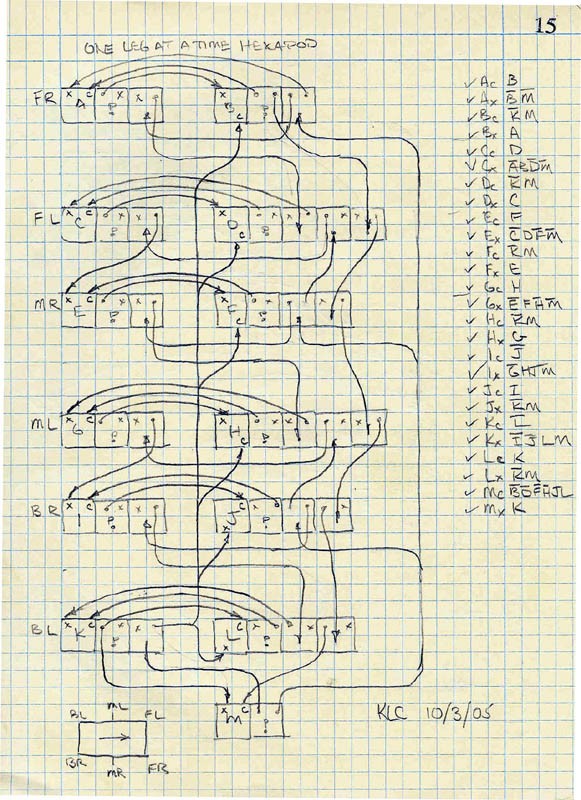
Here is the timing diagram used to design the circuit.
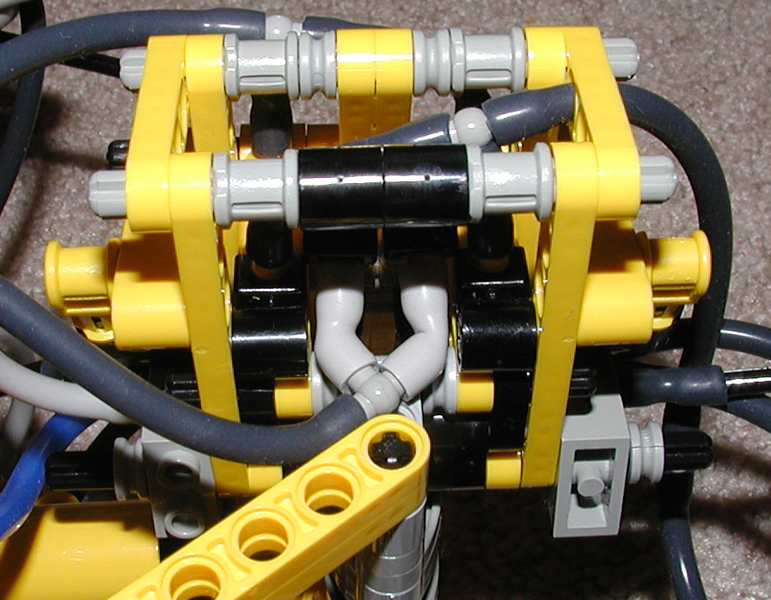
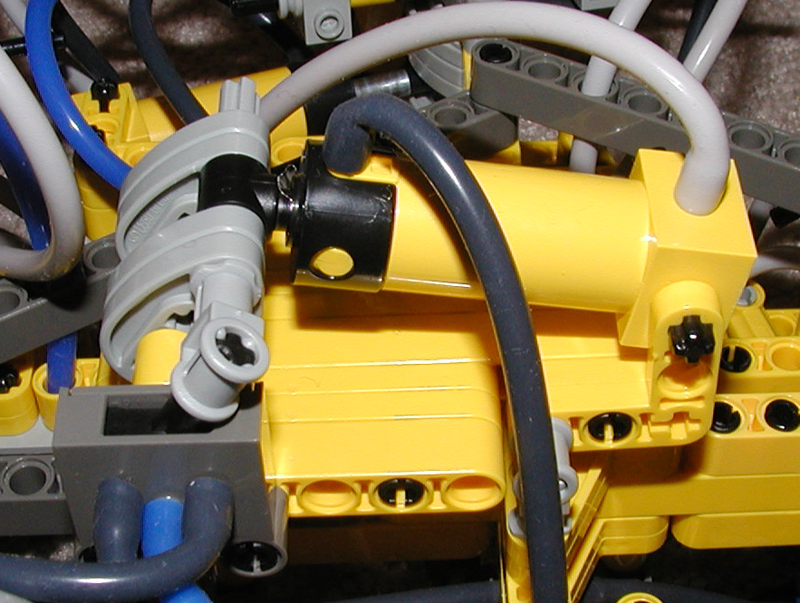
Here is a closeup of a new piston/switch geometry I've been trying. It reduces
the amount the large piston can expand or contract, given the way it is hooked
to the switch. The switch itself constrains the piston. The cams prevent the
piston from pulling the perpendicular axle connector off the switch:
(...) That's good - not many of us have that many small pistons! I wish TLG would bring them out in a set again. I remember when they used to be available as spare parts they cost as much as a large piston. 31 pistons and 32 switches is a similar (...) (21 years ago, 4-Oct-05, to lugnet.technic, lugnet.robotics)
(...) I'll say! Now I also say, "I get it!" I had to stare and read pretty hard. I'll send you my advil bill. (lol) (...) Oooohhh Ya, I like that. (...) Amazing! Short vowels. (...) Still the volume of air is what counts, not the size or rather the (...) (21 years ago, 5-Oct-05, to lugnet.technic, lugnet.robotics)
(...) That is a joy to watch. Even if it is slower than some other gait, it is very interesting to watch. I have vaguely followed your pneumatic threads, watching the cool diagrams and devices, but I will admit you lost me a while back with this. (...) (21 years ago, 5-Oct-05, to lugnet.technic, lugnet.robotics)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}