 | | | | | | |
| |

|
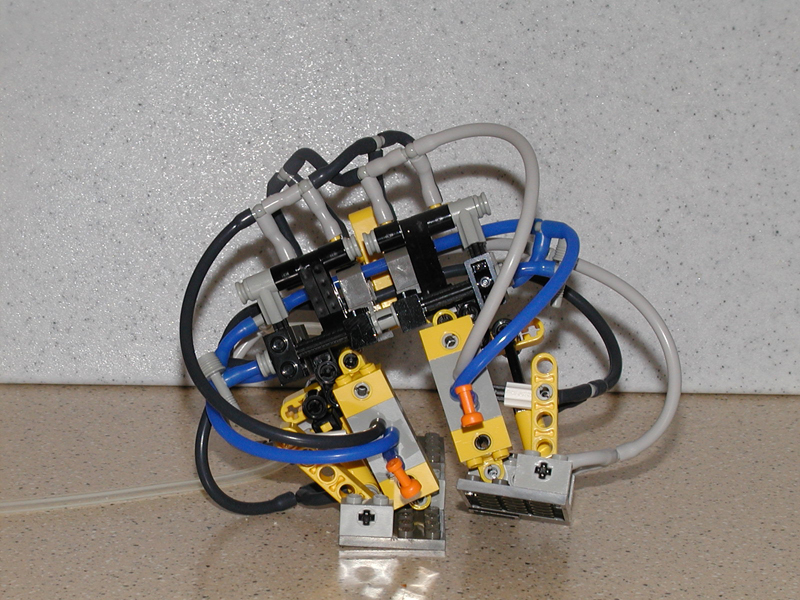
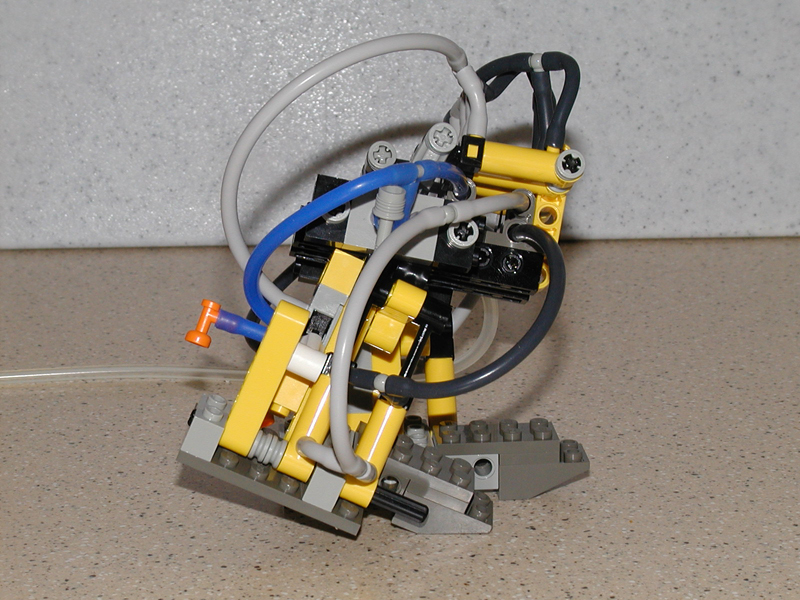
The other day I was given a challenge to make a small biped using small
pneumatic pistons.
Normally I don't use small pistons in combinations with switches, because the
pressure must be increadibly high for a small piston to flip a pneumatic switch
(something like 30 PSI.)
Many of my pneumatic switches are well used, and don't resist flipping as much
as new ones, so I grabbed the four easiest to flip switches that I had.
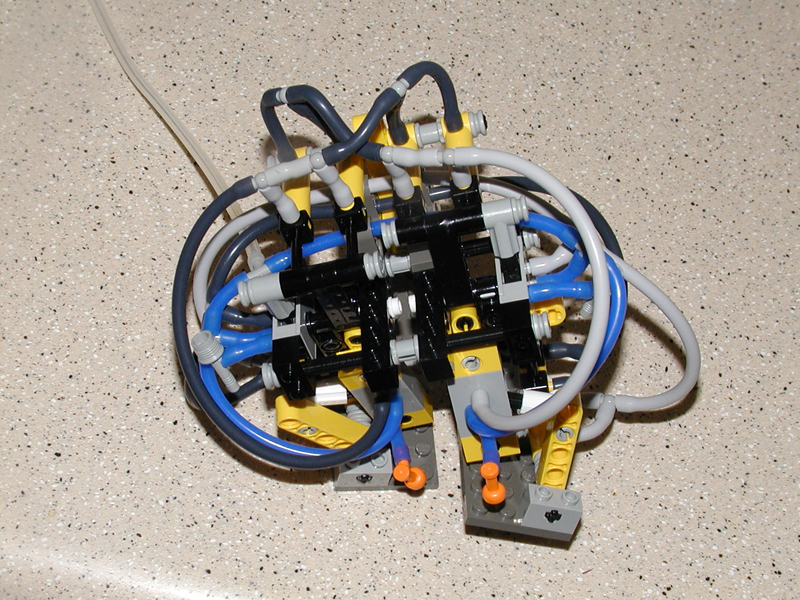
Even with four easy switches, I still found that it took a lot of pressure to
flip the switches. So I ganged two pistons per switch, this made things work
better.
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
There are four pistons per leg, two at the hips to make the legs go forward and
backwards, and to at the ankles to make the ankles lean right and left.
The two hips are wired to be in opposite positions of each other. When the left
leg is forward, the right leg is back, and visa versa. The two ankles are wired
to be in opposite positions of each other. When the left ankle pistons are
contracted, the right ankle pistons are contracted, and visa versa.
At first I tried to use only two switches, but it was hard to keep the whole
thing coordinated, because the pistons without switches had no affect on the
timing of the circuit. This meant that things progressed whether those pistons
change shape properly or not.
I decided to use four switches instead. One at each hip, and one at each ankle.
When the any of the pistons is contracted, the outputs of their switch is
blocked off using short hoses and minifig handheld accessories. This means that
pistons only affect other pistons (by flipping their switch) when they are
expanded.
Right ankle switch feeds the right hip expand and left hip contract ports.
Right hip switch feeds the right ankle expand and left ankle contract ports.
Left hip switch feeds the right ankle contract and left ankle contract ports.
Left ankle switch feeds the right hip contract and left hip expand ports.
To prevent it from falling backwards and still walk smoothly, the heel of the
foot is made out of inverted 30 degree slopes.
PLMKWYT
Kevin
| | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> The other day I was given a challenge to make a small biped using small
> pneumatic pistons.
>
> Normally I don't use small pistons in combinations with switches, because the
> pressure must be increadibly high for a small piston to flip a pneumatic switch
> (something like 30 PSI.)
>
> Many of my pneumatic switches are well used, and don't resist flipping as much
> as new ones, so I grabbed the four easiest to flip switches that I had.
>
> Even with four easy switches, I still found that it took a lot of pressure to
> flip the switches. So I ganged two pistons per switch, this made things work
> better.
>
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
Hi Kevin,
What can I say? Yet another amazing creation. You have a pneumatic control
circuit in there somewhere, I think. I know what you mean about the small
pneumatic cylinders needing such high pressure to move a switch. The engine I
built following Eric Shrader's post over came this problem in the same way.
Instead of having 2 cylinders at 90 degrees and 2 switches, it has 2 cylinders
at 180 degrees and 1 switch. I have yet to build my first walker but I enjoy
seeing all of them. It seems obvious to me that cog shifters would be the more
challenging. Nice work in doing it with pneumatics, my favorite flavor!
Best regards,
Paul
| | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Paul Krieg wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > The other day I was given a challenge to make a small biped using small
> > pneumatic pistons.
> >
> > Normally I don't use small pistons in combinations with switches, because the
> > pressure must be increadibly high for a small piston to flip a pneumatic switch
> > (something like 30 PSI.)
> >
> > Many of my pneumatic switches are well used, and don't resist flipping as much
> > as new ones, so I grabbed the four easiest to flip switches that I had.
> >
> > Even with four easy switches, I still found that it took a lot of pressure to
> > flip the switches. So I ganged two pistons per switch, this made things work
> > better.
> >
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
>
> Hi Kevin,
> What can I say? Yet another amazing creation. You have a pneumatic control
> circuit in there somewhere, I think. I know what you mean about the small
> pneumatic cylinders needing such high pressure to move a switch. The engine I
> built following Eric Shrader's post over came this problem in the same way.
> Instead of having 2 cylinders at 90 degrees and 2 switches, it has 2 cylinders
> at 180 degrees and 1 switch. I have yet to build my first walker but I enjoy
> seeing all of them. It seems obvious to me that cog shifters would be the more
> challenging. Nice work in doing it with pneumatics, my favorite flavor!
Thanks Paul! You are always so kind.
The pneumatic control circuit is similar to one found in a two double acting
cylinder engine, except slightly different. It makes the walking pace more even
from side to side.
>
> Best regards,
> Paul
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Paul Krieg wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > The other day I was given a challenge to make a small biped using small
> > pneumatic pistons.
> >
> > Normally I don't use small pistons in combinations with switches, because the
> > pressure must be increadibly high for a small piston to flip a pneumatic switch
> > (something like 30 PSI.)
> >
> > Many of my pneumatic switches are well used, and don't resist flipping as much
> > as new ones, so I grabbed the four easiest to flip switches that I had.
> >
> > Even with four easy switches, I still found that it took a lot of pressure to
> > flip the switches. So I ganged two pistons per switch, this made things work
> > better.
> >
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
>
> Hi Kevin,
> What can I say? Yet another amazing creation. You have a pneumatic control
> circuit in there somewhere, I think. I know what you mean about the small
> pneumatic cylinders needing such high pressure to move a switch. The engine I
> built following Eric Shrader's post over came this problem in the same way.
> Instead of having 2 cylinders at 90 degrees and 2 switches, it has 2 cylinders
> at 180 degrees and 1 switch. I have yet to build my first walker but I enjoy
> seeing all of them. It seems obvious to me that cog shifters would be the more
> challenging. Nice work in doing it with pneumatics, my favorite flavor!
Hi Paul,
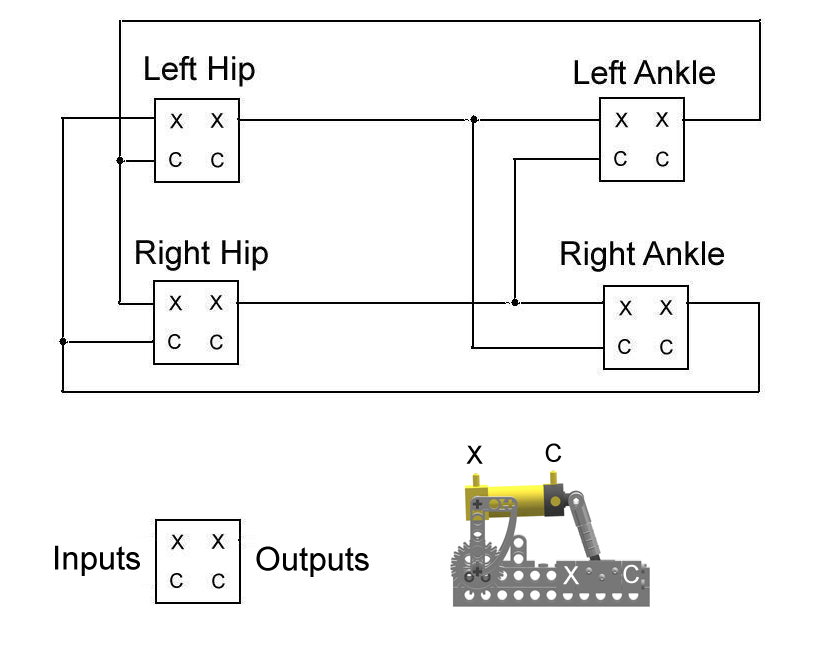
I use a electronic schematic style when drawing out my pneumatic circuit
designs these days. The combination of a piston that is linke to a pneumatic
switch is simply a box, with X and C on the left edge, representing the eXpand
and Contract ports of a piston, and X and C on the right edge representing the
output ports of the switch that are active when the piston is eXpanded or
Contracted. See the bottom of the schematic for clarification of my notation
style.
Here is the schematic of Pedmatic (not pendmatic as the directory name indicates
:^(. Let me know if this notation makes sense to you.
http://www.brickshelf.com/gallery/kclague/pendmatic/schematic.jpg
In this case, there are two small pistons in each box, but the concept is the
same.
>
> Best regards,
> Paul
Cheers,
Kevin
| | | | | | | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> In lugnet.technic, Paul Krieg wrote:
> > Hi Kevin,
> > What can I say? Yet another amazing creation. You have a pneumatic control
> > circuit in there somewhere, I think. I know what you mean about the small
> > pneumatic cylinders needing such high pressure to move a switch. The engine I
> > built following Eric Shrader's post over came this problem in the same way.
> > Instead of having 2 cylinders at 90 degrees and 2 switches, it has 2 cylinders
> > at 180 degrees and 1 switch. I have yet to build my first walker but I enjoy
> > seeing all of them. It seems obvious to me that cog shifters would be the more
> > challenging. Nice work in doing it with pneumatics, my favorite flavor!
>
> Hi Paul,
> I use a electronic schematic style when drawing out my pneumatic circuit
> designs these days. The combination of a piston that is linke to a pneumatic
> switch is simply a box, with X and C on the left edge, representing the eXpand
> and Contract ports of a piston, and X and C on the right edge representing the
> output ports of the switch that are active when the piston is eXpanded or
> Contracted. See the bottom of the schematic for clarification of my notation
> style.
>
> Here is the schematic of Pedmatic (not pendmatic as the directory name indicates
> :^(. Let me know if this notation makes sense to you.
>
> http://www.brickshelf.com/gallery/kclague/pendmatic/schematic.jpg
Yes, I believe it does make sense as long as I remember the left side of the box
is always the piston and the right always the switch. I have been using hand
drawings and my head. Without a good method for creating drawings they can
become confusing. I'm not used to reading this type of diagram nor do I have
any traing in electronics, engineering, etc., so, your notation must be clear if
I understand it.
Regards,
Paul
| | | | | | | | | | | | | | | | | | |
> Even with four easy switches, I still found that it took a lot of pressure to
> flip the switches. So I ganged two pistons per switch, this made things work
> better.
>
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
> PLMKWYT
>
> Kevin
Oh my goodness! That is increadible! Wow, I just can't believe it.
That must have been one tough cookie to break!
May the Walker Maddness never stop!
e
| | | | | | | | | | | | | | | | | | | | |
In lugnet.technic, Eric Sophie wrote:
> > Even with four easy switches, I still found that it took a lot of pressure to
> > flip the switches. So I ganged two pistons per switch, this made things work
> > better.
> >
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
> > PLMKWYT
> >
> > Kevin
>
> Oh my goodness! That is increadible! Wow, I just can't believe it.
> That must have been one tough cookie to break!
Thanks Eric. I'm keeping that one for BrickFest. It took me two days to create.
It helps to have made a few walkers before...
>
> May the Walker Maddness never stop!
Well, the next step is to try to make it *smaller* :^)
>
> e
Kevin
| | | | | | | | | | | | | | | | | | |
| |
|
In lugnet.technic, Kevin L. Clague wrote:
> The other day I was given a challenge to make a small biped using small
> pneumatic pistons.
>
> Normally I don't use small pistons in combinations with switches, because the
> pressure must be increadibly high for a small piston to flip a pneumatic switch
> (something like 30 PSI.)
>
> Many of my pneumatic switches are well used, and don't resist flipping as much
> as new ones, so I grabbed the four easiest to flip switches that I had.
>
> Even with four easy switches, I still found that it took a lot of pressure to
> flip the switches. So I ganged two pistons per switch, this made things work
> better.
>
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
I made a video of this one.... The video is real time, so you can see that it
moves quite quickly. I used my best compressor for this (three large hand pumps
side by side all being pumped by hand at the same time :^)
http://www.brickshelf.com/gallery/kclague/pendmatic/ppjr.mpg
Kevin
| | | | | | |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}