| |
In lugnet.technic, Lindsay Frederick Braun wrote:
> In lugnet.technic, Kevin L. Clague wrote:
> > I pleased to announce my newest pneumatic walker, hex363.
> >
> > http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> > http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
> >
> > http://www.kclague.net/hex363/hex363.MOV
> >
> > Hex363 is similar in pneumatic circuit design to Quad242
> > (http://www.kclague.net/Quad242/index.htm)
<snip>
> That walker is absolutely *brilliant*. I don't normally
> check out the .technic or .robotics side of things, but
> today I'm very glad I did. That is absolutely incredible--
> and not least of the achievements is keeping it looking so
> very nice. The design is very sound--how robust is it?
> Have you tried getting it to bear a load on its back (as
> the triangular foot groups and internal center of gravity
> might allow)? It seems like it would be very sure-footed
> generally. How does it handle inclines or obstacles?
>
> Just wow. Wow.
I did some test driving and it was not very robust.
I tried to have it walk over an upside-down cake pan. It fell back on a
triangle made of two feet from one group, and one foot from the other (this one
was retracted.) I didn't bother to find out what amount of elevation was OK. I
also tried it on what I considered a very reasonable include, and it fell over.
I attribute this lack of robustness due to high center of gravity, and lack of
rigidity in the leg extension/retraction mechanism.
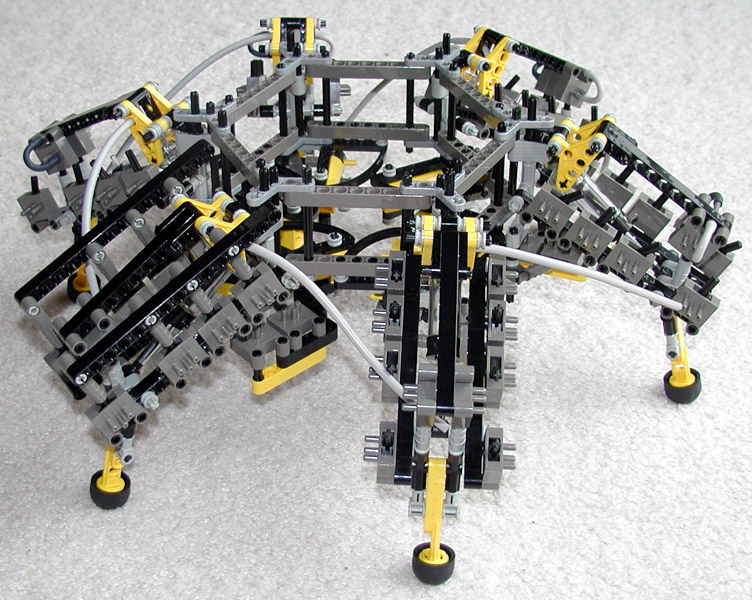
I figured out how to place the hip pistons on the under side of the frame,
lowering the center of gravity. Now the body looks like an empty hexagonal box.
Room enough for a couple of RCX's I suppose.
http://www.brickshelf.com/gallery/kclague/PhD-Mark-2/p3270027.jpg
Obviously the pneumatics are not hooked, up, but the structure is sound and
compact.
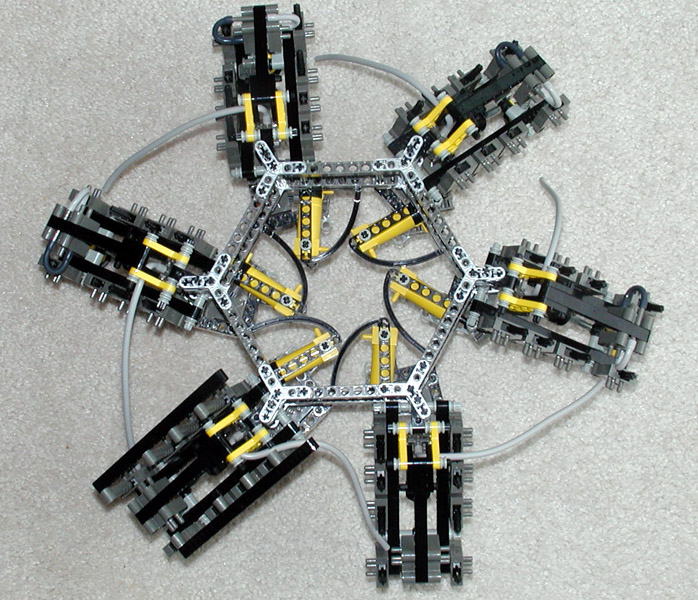
I like the symmetry this new design gives:
http://www.brickshelf.com/gallery/kclague/PhD-Mark-2/p3270029.jpg
I've also added the pneumatic switches needed for the next version called PhD
(Pneumatic Hexapod omni-Directional).
>
> all best
>
> LFB
Once I get it walking, I'll check its robustness. Hopefully the lower center of
gravity will increase robustness.
Kevin
|
|
Message is in Reply To:
 | | Re: Hex363
|
| (...) [snip] (...) I think you're a very scary man, Kevin. That walker is absolutely *brilliant*. I don't normally check out the .technic or .robotics side of things, but today I'm very glad I did. That is absolutely incredible-- and not least of (...) (22 years ago, 21-Mar-04, to lugnet.technic, lugnet.robotics)
|
20 Messages in This Thread:

  
 
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}