| |
Amazing, Stunning, Fantastic, Spectacular........
None of these do this creation justice Kevin! That is by far the most
complicated Lego creation I have ever seen! Makes me want to go out and buy
10 backhoe sets. :)
So, when will the K.C. Mastering Lego Pneumatics Handbook be coming out?
Pre-order my copy today. :)
Greg
"Kevin L. Clague" <kevin_clague@yahoo.com> wrote in message
news:Huy3E9.1G57@lugnet.com...
> I pleased to announce my newest pneumatic walker, hex363.
>
> http://www.brickshelf.com/gallery/kclague/phd/p3180016.jpg
> http://www.brickshelf.com/gallery/kclague/phd/p3180020.jpg
>
> http://www.kclague.net/hex363/hex363.MOV
>
> Hex363 is similar in pneumatic circuit design to Quad242
> (http://www.kclague.net/Quad242/index.htm)
>
> Hex363 is completely pneumatic. Hex363 is a pneumatic sequencer that • can walk
> forward. Each leg can extend to the ground, or contract to lift itself • off the
> ground. It does this using a single large piston and two pneumatic • switches.
> Each leg can sweep right and left using a single large piston and two • switches.
>
> Hex363's six legs are split into two groups of three legs. When a given
> group's three legs are extended to touch the ground, the footprint of • those feet
> form a triangle. The center of gravity of hex363 always stays within the
> triangles formed by the down feet. This allows hex363 to have very small • feet.
>
> As hex363 walks it either has one or both feet groups on the ground at a • time.
> When hex363 wants to transfer weight from one foot group to the other, it • places
> all six feet on the ground, and then lifts the feet that are not to be • weight
> bearing. Once three of the feet are retracted, it sweeps all six hips
> horizontally to take a step. Hex363 then places all six feet on the • ground, and
> transfer's weight to the other three feet by lifting the legs that were • weight
> bearing. Once the feet are retracted, it sweeps the hips horizontally to
> complete a stride. Once the hip sweep is complete, hex363 puts all six • feet on
> the ground. It repeats the above pattern over and over to walk forwards.
>
> Hex363 contains a total of 12 large pistons, four small pistons, and 26
> pneumatic switches.
>
> I had shown images of hex363 in the past, but until today it did not • walk
> correctly. I finally figured out what was wrong, rewired the foot sweep • portion
> of the circuit and it walked forward.
>
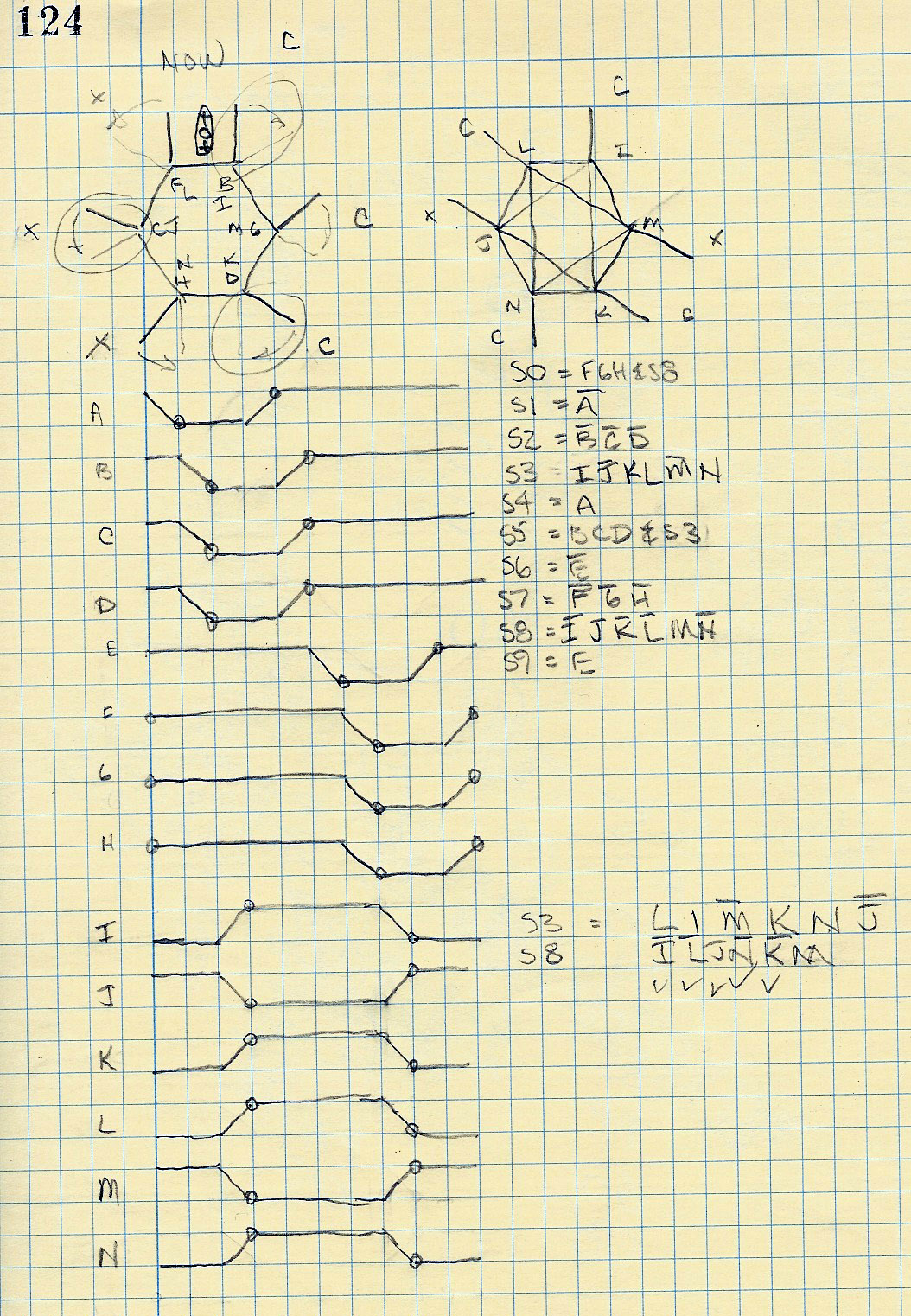
> Timing diagram and circuit description is described rather tersly in • this
> image http://www.brickshelf.com/gallery/kclague/phd/circuit.jpg
>
> hex363 is the most complicated pneumatic design I've ever created.
>
> PLMKWYT,
>
> Kevin
|
|
Message has 1 Reply:
 | | Re: Hex363
|
| (...) Thanks Gergory! You would only need four backhoes' pneumatics to make hex363's circuit, but hey, don't let me stop you from buying more! :^) (...) It took me about three years to come up with a methodology for designing pneumatic sequencers on (...) (22 years ago, 23-Mar-04, to lugnet.technic, lugnet.robotics)
|
Message is in Reply To:
| | Hex363
|
| I pleased to announce my newest pneumatic walker, hex363. (URL) is similar in pneumatic circuit design to Quad242 ((URL) Hex363 is completely pneumatic. Hex363 is a pneumatic sequencer that can walk forward. Each leg can extend to the ground, or (...) (22 years ago, 21-Mar-04, to lugnet.technic, lugnet.robotics, lugnet.announce.moc) !!
|
20 Messages in This Thread:

 
 

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}