Subject:
|
New (at least to me) optimal geometry for pneumatically flipped switches
|
Newsgroups:
|
lugnet.technic
|
Date:
|
Mon, 6 Oct 2003 18:17:15 GMT
|
Viewed:
|
2193 times
|
| |

|
|
I used the same geometry for pistons flipping switches for a long time, but
decided to see if I could come up with something better. The new geometries
take less parts than my older geometry, and get better range of motion.
My old tried and true geometry is:
http://www.brickshelf.com/gallery/kclague/Computing/p5310043.jpg
It requires 24T gears to get a 1/2 stud offset both horizontally and vertically.
It is not a perfect geometry because the switch does not get complete range of
motion, but it was my best until recently, and has been good enough for many a
project. I wanted to see if I could reduce part count on this geometry, because
my pneumatic computer is going to need maybe 100 pistons controlling switches
(or more).
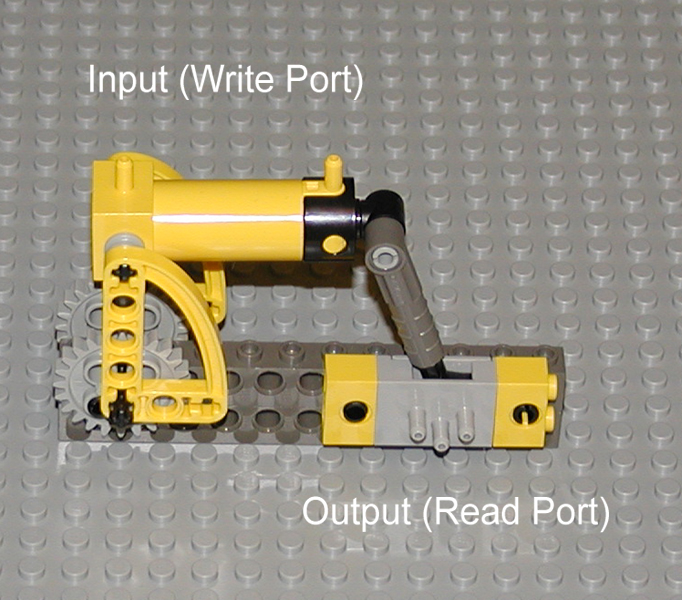
The first new geometry is for pre-8455 penumatic switches (e.g. mold 4694).
It is a perfect geometry because you get full range of motion out of the switch,
and full range of motion out of the piston. There is no structural stress when
the piston is fully expanded or contracted. It can be seen at:
http://www.brickshelf.com/gallery/kclague/Computing/pswitch.jpg
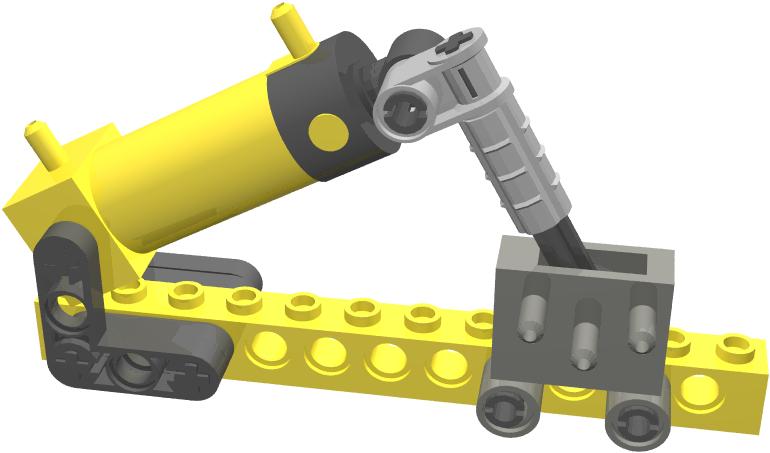
The second geometry is for pneumatic switch form factor first introduced in
the 8455 set (no mold number externally visible). This is also a perfect
geometry. I've made a rough draft of that switch for LDraw so I could render
the geometry.
http://www.brickshelf.com/gallery/kclague/Computing/npswitch.jpg
Anyone else got some good geometries out there?
Feedback desired, but not required.
Kevin
|
|
Message has 1 Reply:
4 Messages in This Thread:
   optimal geometry for pneumatically flipped switches -Mark Bellis (7-Oct-03 to lugnet.technic)")
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}