Subject:
|
Re: Odin, a robot for odometry
|
Newsgroups:
|
lugnet.robotics
|
Date:
|
Wed, 15 Oct 2008 12:49:00 GMT
|
Viewed:
|
15548 times
|
| |

|
|
In lugnet.robotics, Philippe Hurbain wrote:
| |
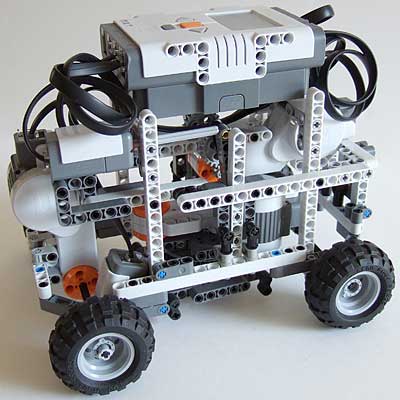
A robot able to move around along pre-defined paths, and keep an estimation
of its position from encoders in its wheels and central pivot.

Its mechanical structure allows it to go straight with 4 fixed direction
wheels, and to turn precisely around a retractable central pivot.

After a round trip Odin will come back at its starting position with some
position and bearing offset A light sensor placed below Odin enables it to
return home guided by a L-shaped mark on the floor.
More details, images, video, programs and full building instructions
available here.
Enjoy!
Philo
|
Very nice work,... as usual ;-) (Noblesse oblige!)
-Claude
|
|
Message is in Reply To:
 | | Odin, a robot for odometry
|
| (URL) A robot able to move around along pre-defined paths, and keep an estimation of its position from encoders in its wheels and central pivot. (URL) Its mechanical structure allows it to go straight with 4 fixed direction wheels, and to turn (...) (18 years ago, 15-Oct-08, to lugnet.robotics, FTX)
|
2 Messages in This Thread:
 
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|