Subject:
|
Re: MOC - Small Pneumatic Biped Walker
|
Newsgroups:
|
lugnet.technic, lugnet.robotics
|
Date:
|
Mon, 16 Jun 2003 11:43:01 GMT
|
Viewed:
|
498 times
|
| |

|
|
In lugnet.technic, Paul Krieg wrote:
> In lugnet.technic, Kevin L. Clague wrote:
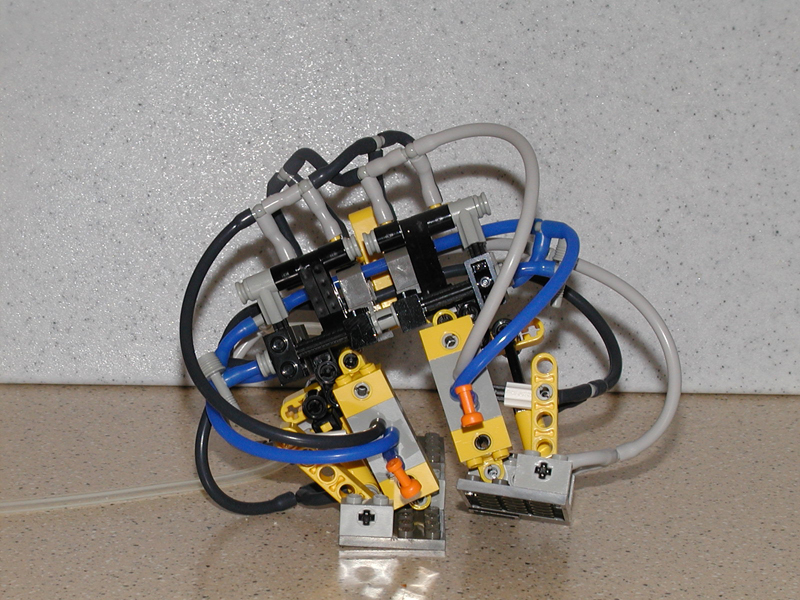
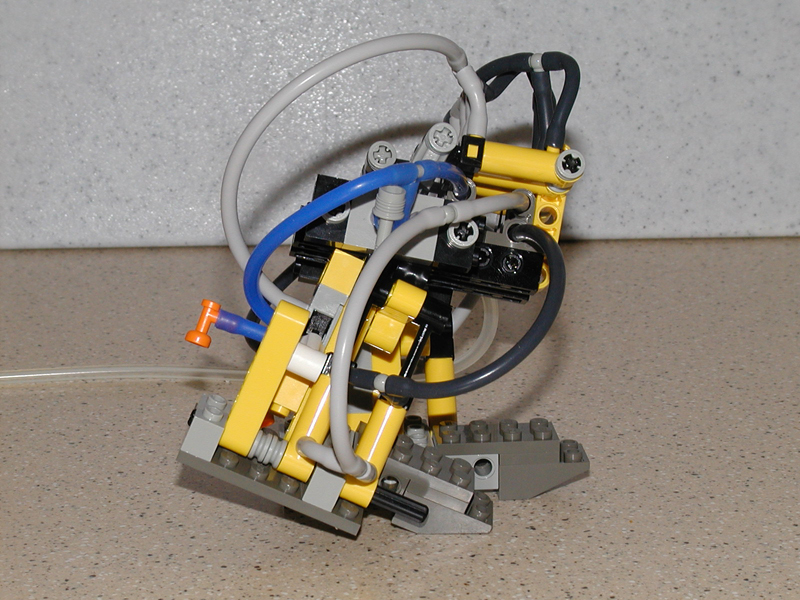
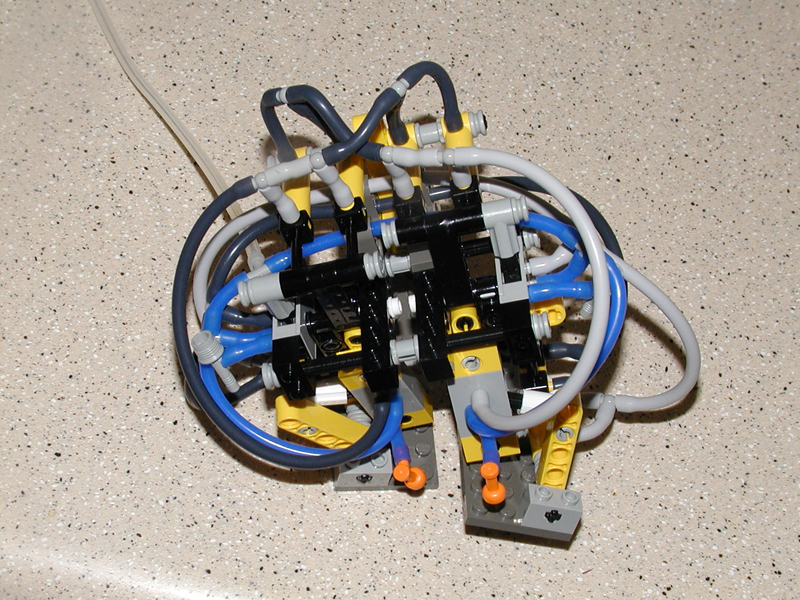
> > The other day I was given a challenge to make a small biped using small
> > pneumatic pistons.
> >
> > Normally I don't use small pistons in combinations with switches, because the
> > pressure must be increadibly high for a small piston to flip a pneumatic switch
> > (something like 30 PSI.)
> >
> > Many of my pneumatic switches are well used, and don't resist flipping as much
> > as new ones, so I grabbed the four easiest to flip switches that I had.
> >
> > Even with four easy switches, I still found that it took a lot of pressure to
> > flip the switches. So I ganged two pistons per switch, this made things work
> > better.
> >
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
> > http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
>
> Hi Kevin,
> What can I say? Yet another amazing creation. You have a pneumatic control
> circuit in there somewhere, I think. I know what you mean about the small
> pneumatic cylinders needing such high pressure to move a switch. The engine I
> built following Eric Shrader's post over came this problem in the same way.
> Instead of having 2 cylinders at 90 degrees and 2 switches, it has 2 cylinders
> at 180 degrees and 1 switch. I have yet to build my first walker but I enjoy
> seeing all of them. It seems obvious to me that cog shifters would be the more
> challenging. Nice work in doing it with pneumatics, my favorite flavor!
Hi Paul,
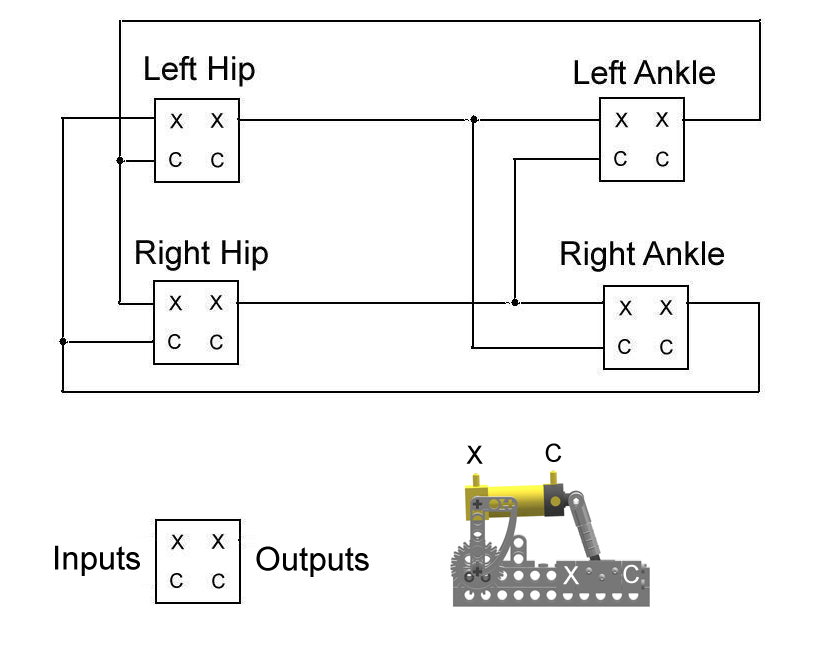
I use a electronic schematic style when drawing out my pneumatic circuit
designs these days. The combination of a piston that is linke to a pneumatic
switch is simply a box, with X and C on the left edge, representing the eXpand
and Contract ports of a piston, and X and C on the right edge representing the
output ports of the switch that are active when the piston is eXpanded or
Contracted. See the bottom of the schematic for clarification of my notation
style.
Here is the schematic of Pedmatic (not pendmatic as the directory name indicates
:^(. Let me know if this notation makes sense to you.
http://www.brickshelf.com/gallery/kclague/pendmatic/schematic.jpg
In this case, there are two small pistons in each box, but the concept is the
same.
>
> Best regards,
> Paul
Cheers,
Kevin
|
|
Message has 1 Reply:
 | | Re: MOC - Small Pneumatic Biped Walker
|
| (...) is always the piston and the right always the switch. I have been using hand drawings and my head. Without a good method for creating drawings they can become confusing. I'm not used to reading this type of diagram nor do I have any traing in (...) (23 years ago, 17-Jun-03, to lugnet.technic, lugnet.robotics)
|
Message is in Reply To:
| | Re: MOC - Small Pneumatic Biped Walker
|
| (...) What can I say? Yet another amazing creation. You have a pneumatic control circuit in there somewhere, I think. I know what you mean about the small pneumatic cylinders needing such high pressure to move a switch. The engine I built following (...) (23 years ago, 16-Jun-03, to lugnet.technic, lugnet.robotics)
|
8 Messages in This Thread:

   

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}