| |
The other day I was given a challenge to make a small biped using small
pneumatic pistons.
Normally I don't use small pistons in combinations with switches, because the
pressure must be increadibly high for a small piston to flip a pneumatic switch
(something like 30 PSI.)
Many of my pneumatic switches are well used, and don't resist flipping as much
as new ones, so I grabbed the four easiest to flip switches that I had.
Even with four easy switches, I still found that it took a lot of pressure to
flip the switches. So I ganged two pistons per switch, this made things work
better.
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120001.jpg
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120002.jpg
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120003.jpg
http://www.brickshelf.com/gallery/kclague/pendmatic/p6120004.jpg
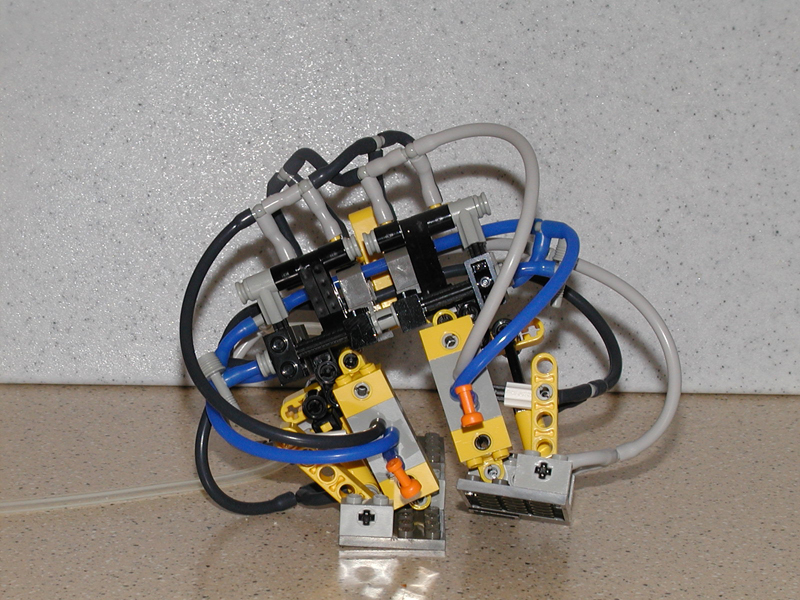
There are four pistons per leg, two at the hips to make the legs go forward and
backwards, and to at the ankles to make the ankles lean right and left.
The two hips are wired to be in opposite positions of each other. When the left
leg is forward, the right leg is back, and visa versa. The two ankles are wired
to be in opposite positions of each other. When the left ankle pistons are
contracted, the right ankle pistons are contracted, and visa versa.
At first I tried to use only two switches, but it was hard to keep the whole
thing coordinated, because the pistons without switches had no affect on the
timing of the circuit. This meant that things progressed whether those pistons
change shape properly or not.
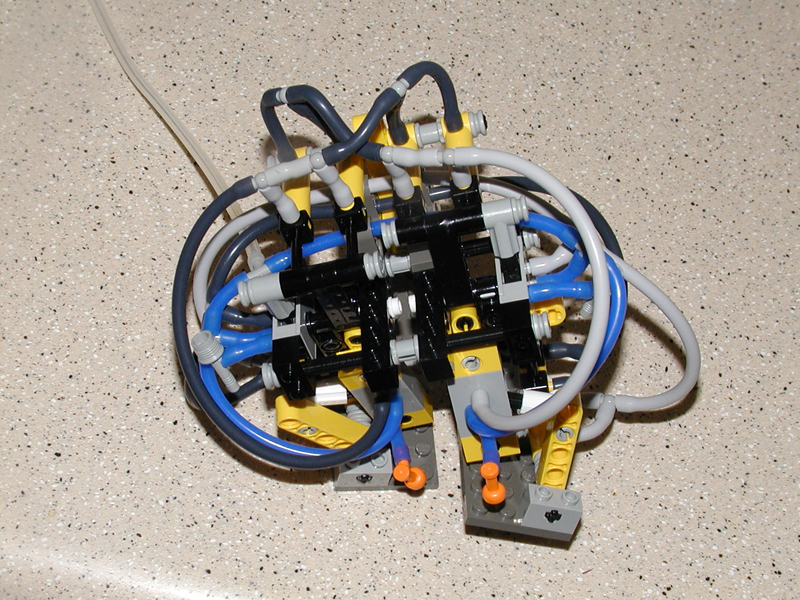
I decided to use four switches instead. One at each hip, and one at each ankle.
When the any of the pistons is contracted, the outputs of their switch is
blocked off using short hoses and minifig handheld accessories. This means that
pistons only affect other pistons (by flipping their switch) when they are
expanded.
Right ankle switch feeds the right hip expand and left hip contract ports.
Right hip switch feeds the right ankle expand and left ankle contract ports.
Left hip switch feeds the right ankle contract and left ankle contract ports.
Left ankle switch feeds the right hip contract and left hip expand ports.
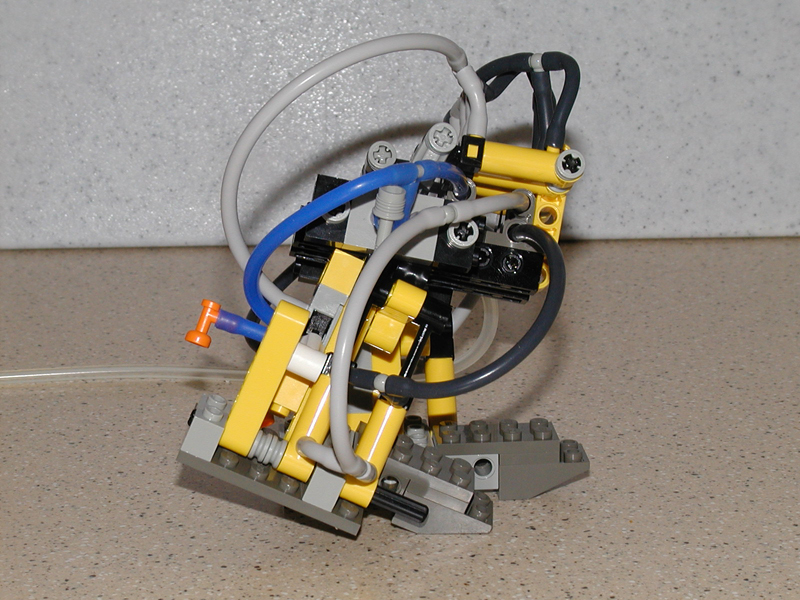
To prevent it from falling backwards and still walk smoothly, the heel of the
foot is made out of inverted 30 degree slopes.
PLMKWYT
Kevin
|
|
Message has 3 Replies:
 | | Re: MOC - Small Pneumatic Biped Walker
|
| (...) What can I say? Yet another amazing creation. You have a pneumatic control circuit in there somewhere, I think. I know what you mean about the small pneumatic cylinders needing such high pressure to move a switch. The engine I built following (...) (23 years ago, 16-Jun-03, to lugnet.technic, lugnet.robotics)
|
8 Messages in This Thread:
 
  

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}