| |
Philippe Hurbain wrote:
> <http://www.philohome.com/theo/walker.htm<http://www.philohome.com/theo/w1-t.jpg>>
>
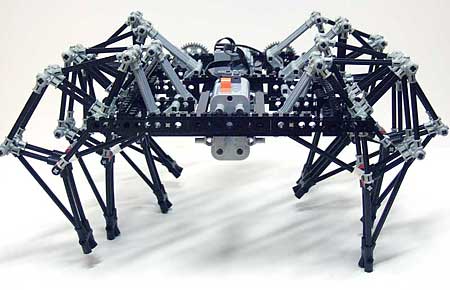
> I went on and built my own version, using 8 legs with 90° phase offset and Power
> Functions motorization. Still a few things to improve, such as the bad balance
> due to the weight of the battery pack...
>
> See it [<http://www.philohome.com/theo/walker.htm here>].
>
> Thanks again for the building incentive ;o)
>
> Philo
Thats a nice walker. Great job, now I want to place a brickshelf order
so i can get more 7L axles. :)
May I ask why you went with a longer axle at the "front" of the leg? As
opposed to making it a "square" design.
Also, great idea on the IR motors for the walker. I wanted to try that
as well, when Janey first suggested it to me, but alas, I am short on
the new power function motors. :)
Chris
|
|
Message has 1 Reply:
 | | Re: Walker using new leg design
|
| (...) I fiddled with lengths in Euklides till I got a reasonnably flat and horizontal path for the foot, while keeping axle lengths even, and came up with this one. After building I had again a closer look at this other simulation: (URL) the bottom (...) (19 years ago, 22-Oct-07, to lugnet.org.ca.rtltoronto, lugnet.technic)
|
Message is in Reply To:
| | Re: Walker useing new leg design
|
| (URL) I went on and built my own version, using 8 legs with 90° phase offset and Power Functions motorization. Still a few things to improve, such as the bad balance due to the weight of the battery pack... See it (URL) here>. Thanks again for the (...) (19 years ago, 22-Oct-07, to lugnet.org.ca.rtltoronto, lugnet.technic, FTX)
|
34 Messages in This Thread:


 
 
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
This Message and its Replies on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}