Subject:
|
Re: C$ -- its all over
|
Newsgroups:
|
lugnet.org.ca.rtltoronto
|
Date:
|
Mon, 2 Feb 2004 16:20:48 GMT
|
Viewed:
|
1756 times
|
| |

|
|
In lugnet.org.ca.rtltoronto, Chris Magno wrote:
> this is how the final four breaks down:
>
> Steve the guy we all Love to hate, came in First. he earned it fair and
> square.
new sig line? maybe.
> all in all, we had 12 robots show up that attempted some level of the
> game, but very quickly lost out in the HARSH decision process of getting
> to the final four.
I've been thinking there were 12, but you actually listed 14 robots below...
> so all in all it was a GREAT event.
>
> we were a bit tight for space due to some lesser event. (marble sorting
> but really should have been called marble hoarding)
>
>
> how things shaped up robot wise:
The first thing that seemed to slip the minds of most people is that one of the
goals of these rtl events is to build a robot that does something. (and learn
something doing it) Strategies may vary, but the goal is to build a robot! :)
I think several people/teams had a good strategy/game-engine, but most were
lacking that first thing.
Another critical item: As many people discovered, using a light sensor to
detect chips was a BAD idea.
Here are some (big) pictures.
>
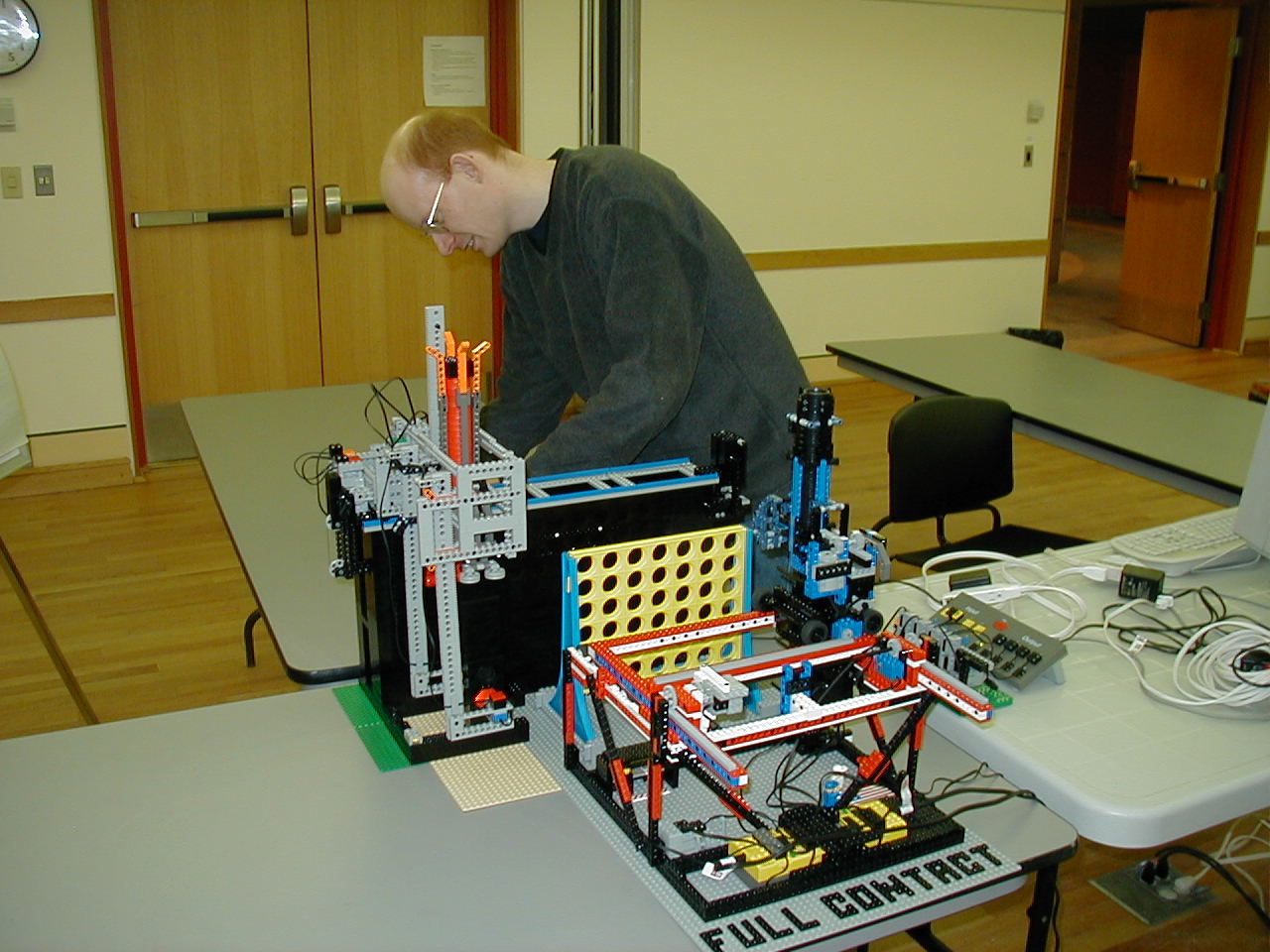
> Steve -- used 6 cyber touch sensors to poke a column at a time
Total of ten touch sensors and two rotation sensors, connected to five sensor
ports. zero light sensors.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/a_connect_four_robot.jpg
> Derek -- used a light sensor (successfully)
This needs a much better description. I'll try. This was the only robot which
successfully used a light sensor to detect chips. He did that by moving a light
around the opposite side of the board. Very cool.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/derek1.jpg
> John -- random 7. nice deployment arm
Broust (sp?) Used pnumatics to release the chip, and the 12 cylinder engine
from the Power Puller to run the compressor to charge the air tanks. :)
He never had any problem detecting opponent chips. Ok, so he never tried.
Crappy strategy. Solid robot. Tied for third.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/lucky.jpg
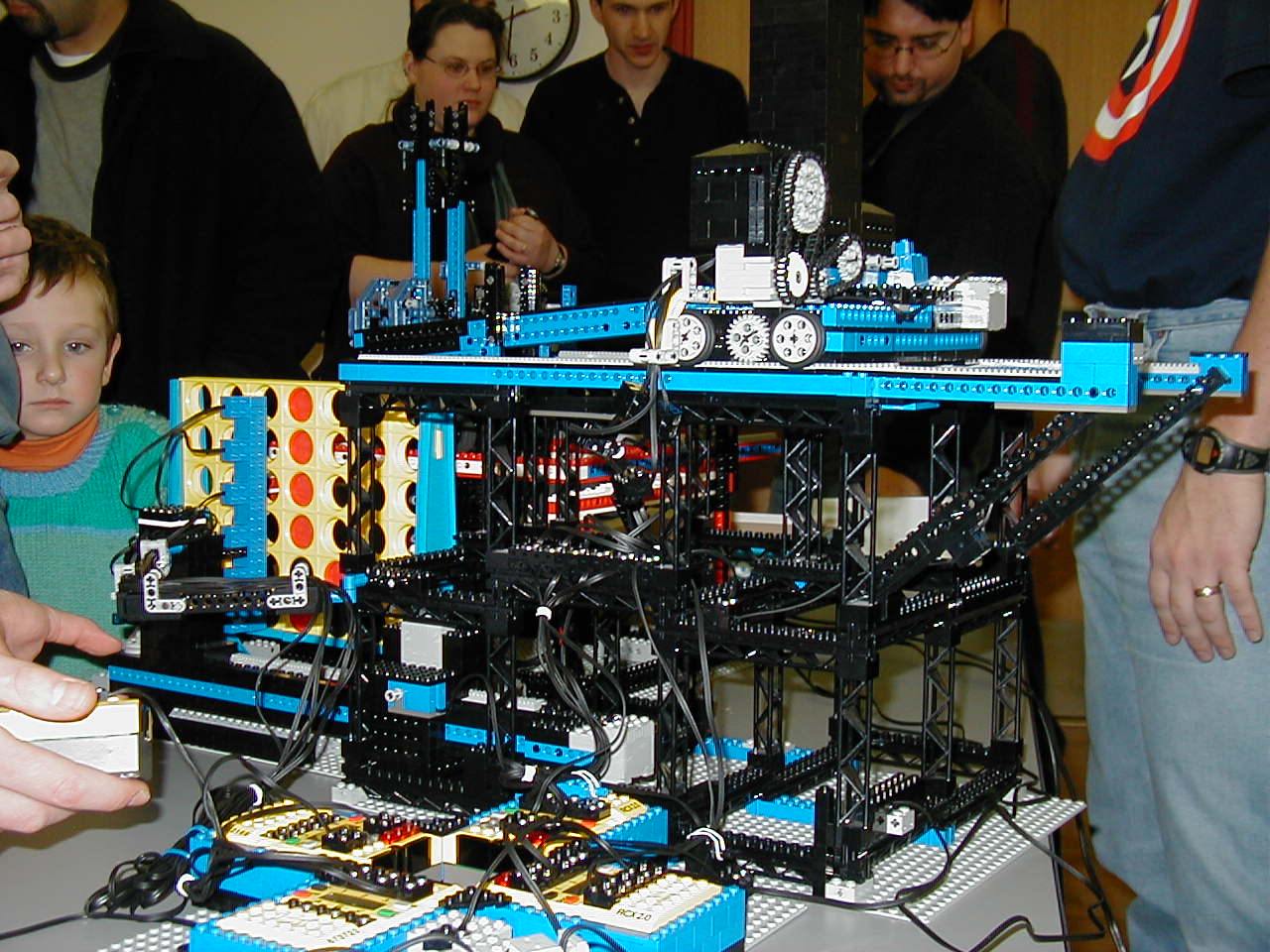
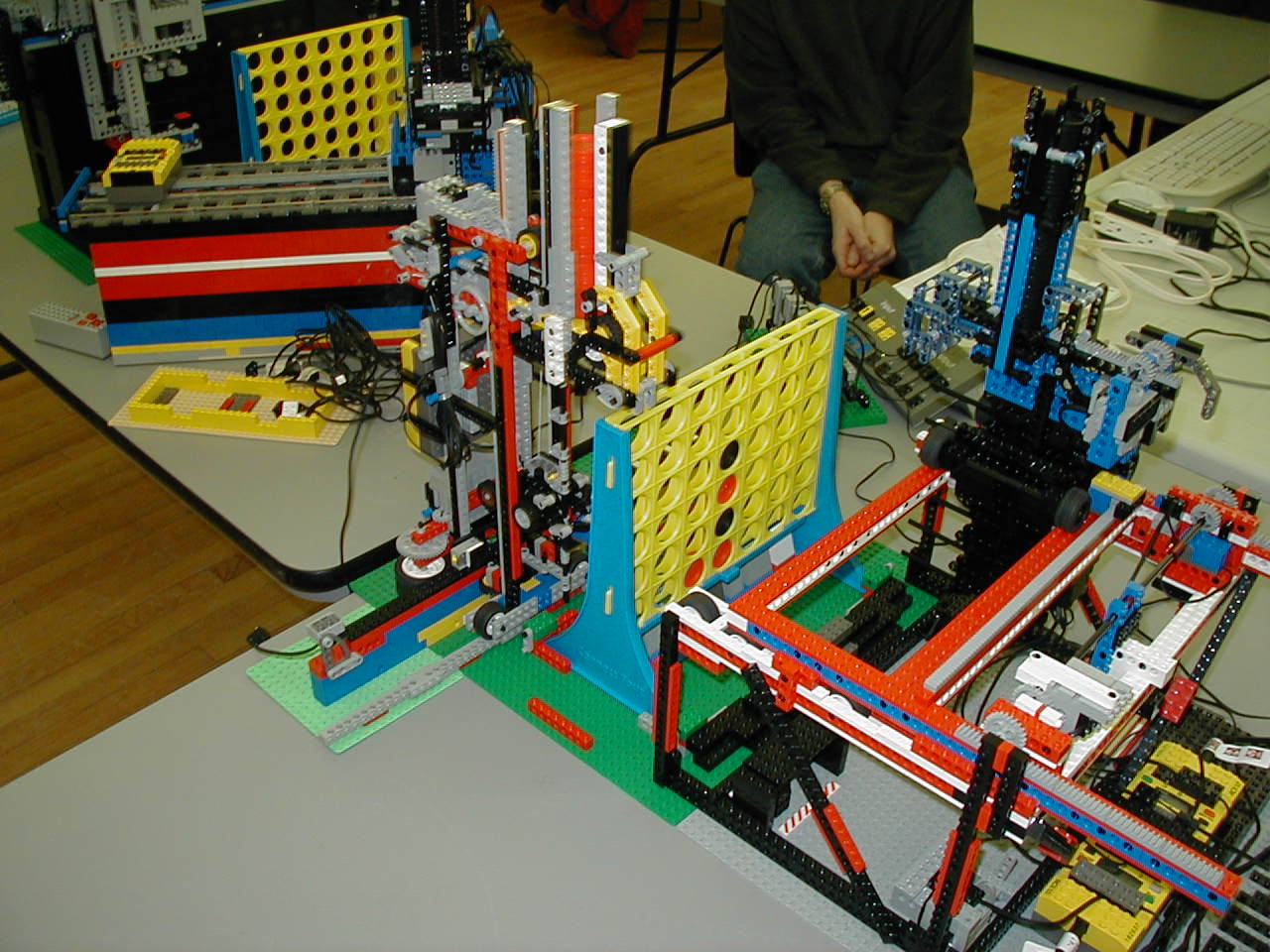
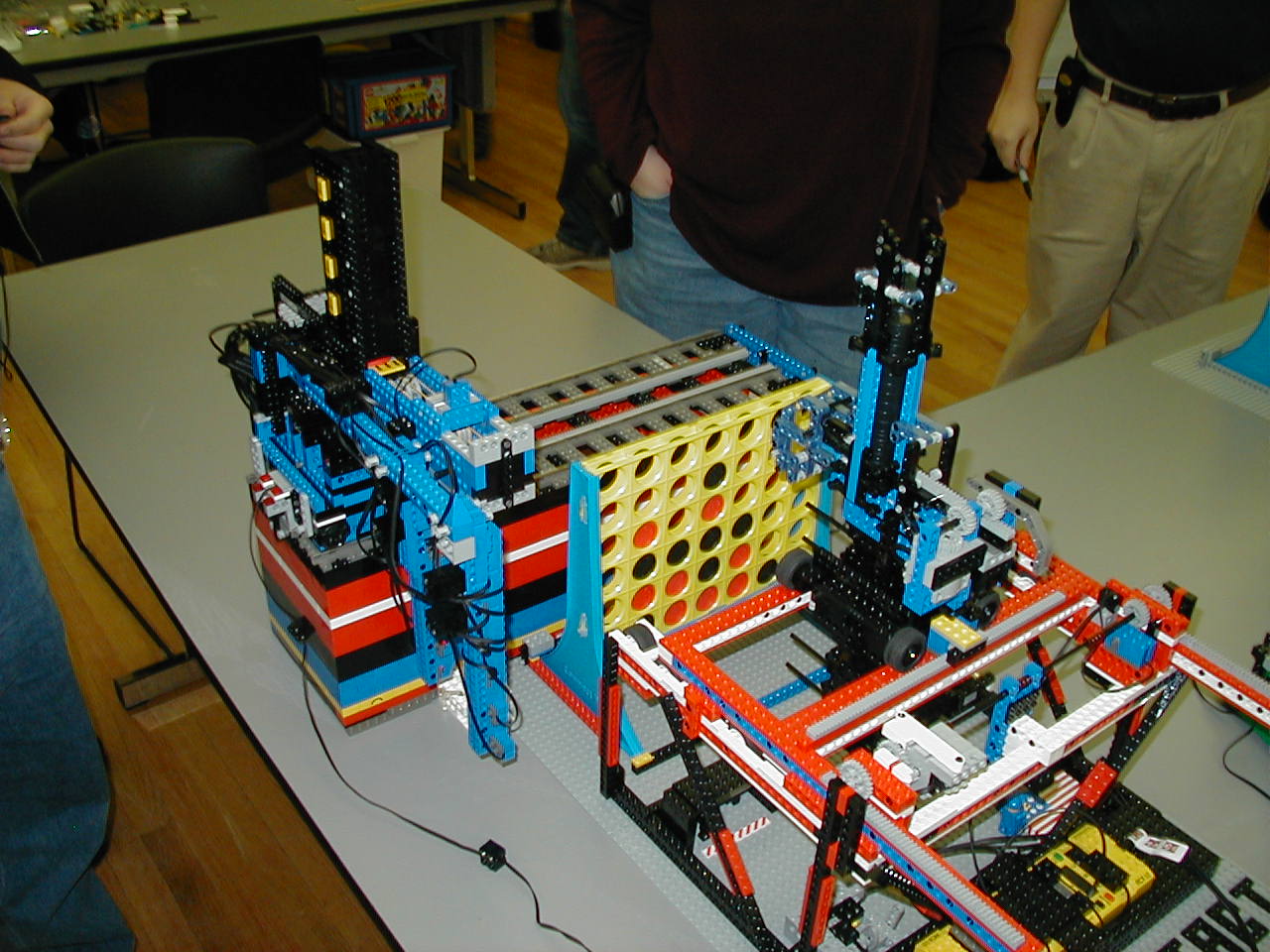
> Vitalli -- 6 light sensors to scan, great arm to swivel them back and forth
nice idea. But it used light sensors, so it was blind.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/fc_vs_vitalli2.jpg
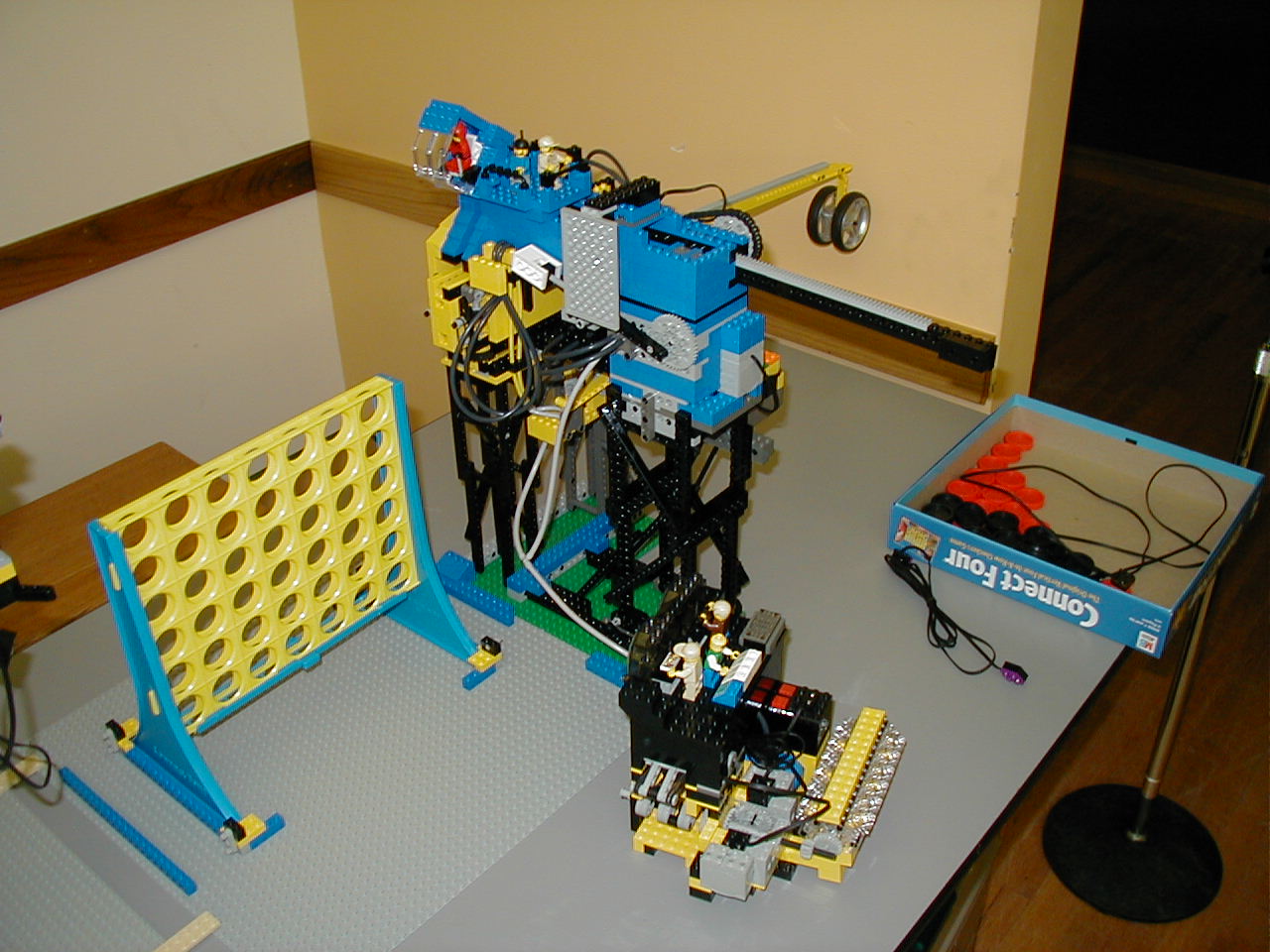
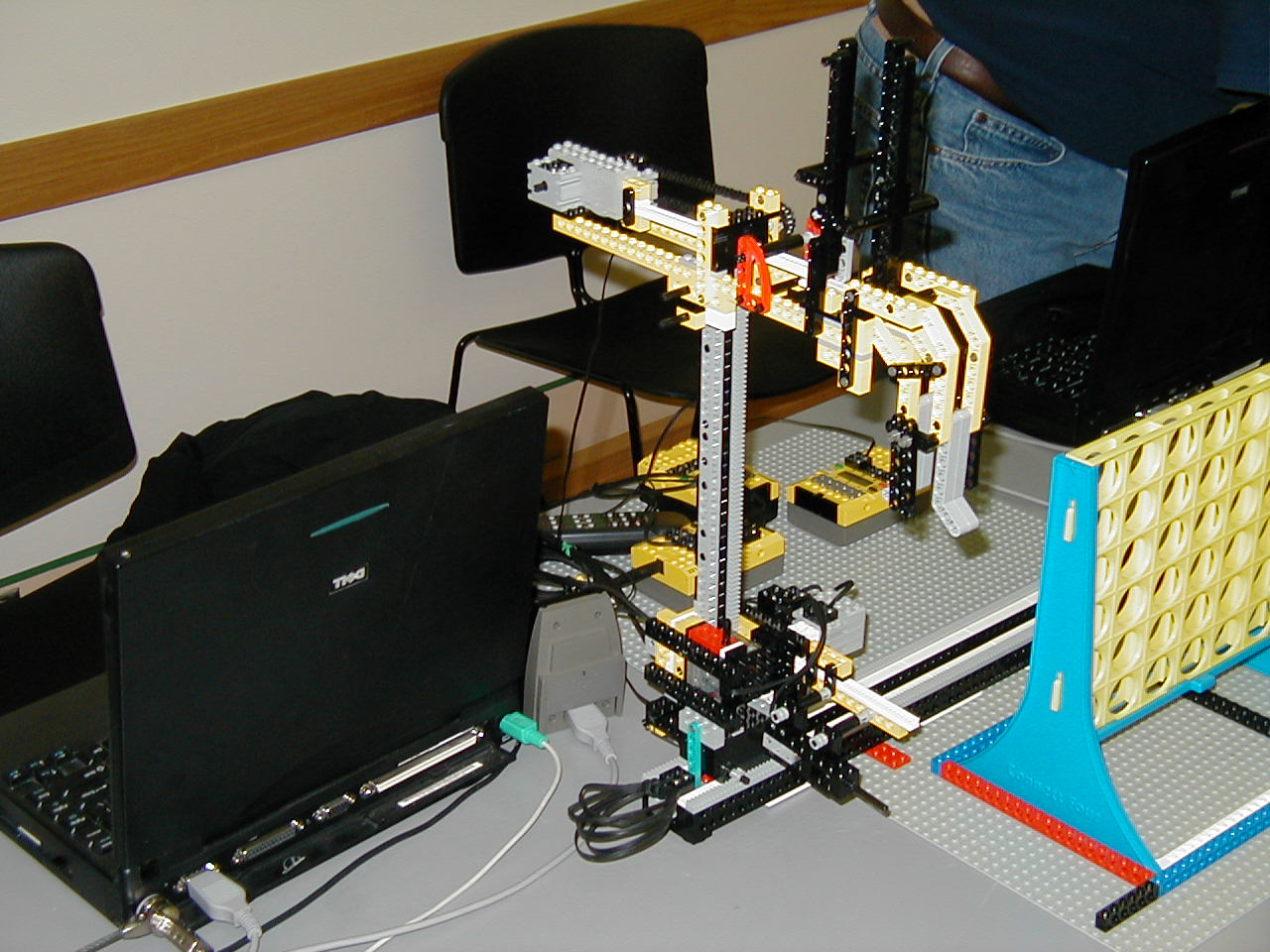
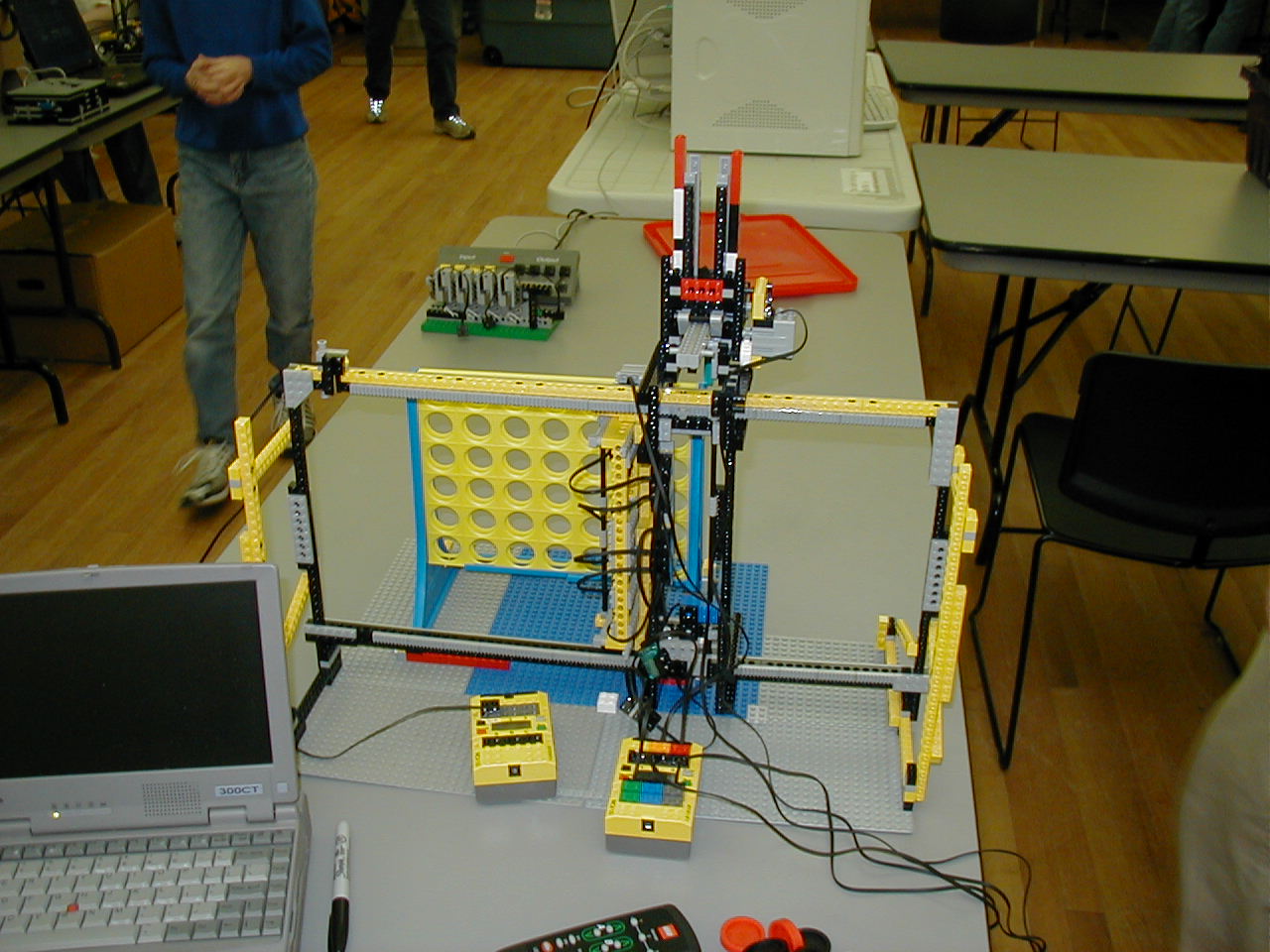
> Chris -- one poking touch sensor
I think there's a motor added to the top of this tower for extra weight!?
Leaning tower of LEGO...
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/chris2.jpg
> Bruce -- one poking touch sensor
good, solid design.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/bruce1.jpg
> Michael P - one poking touch sensor
Actually, he used one Light sensor. That was his downfall.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/fc_vs_mikep2.jpg
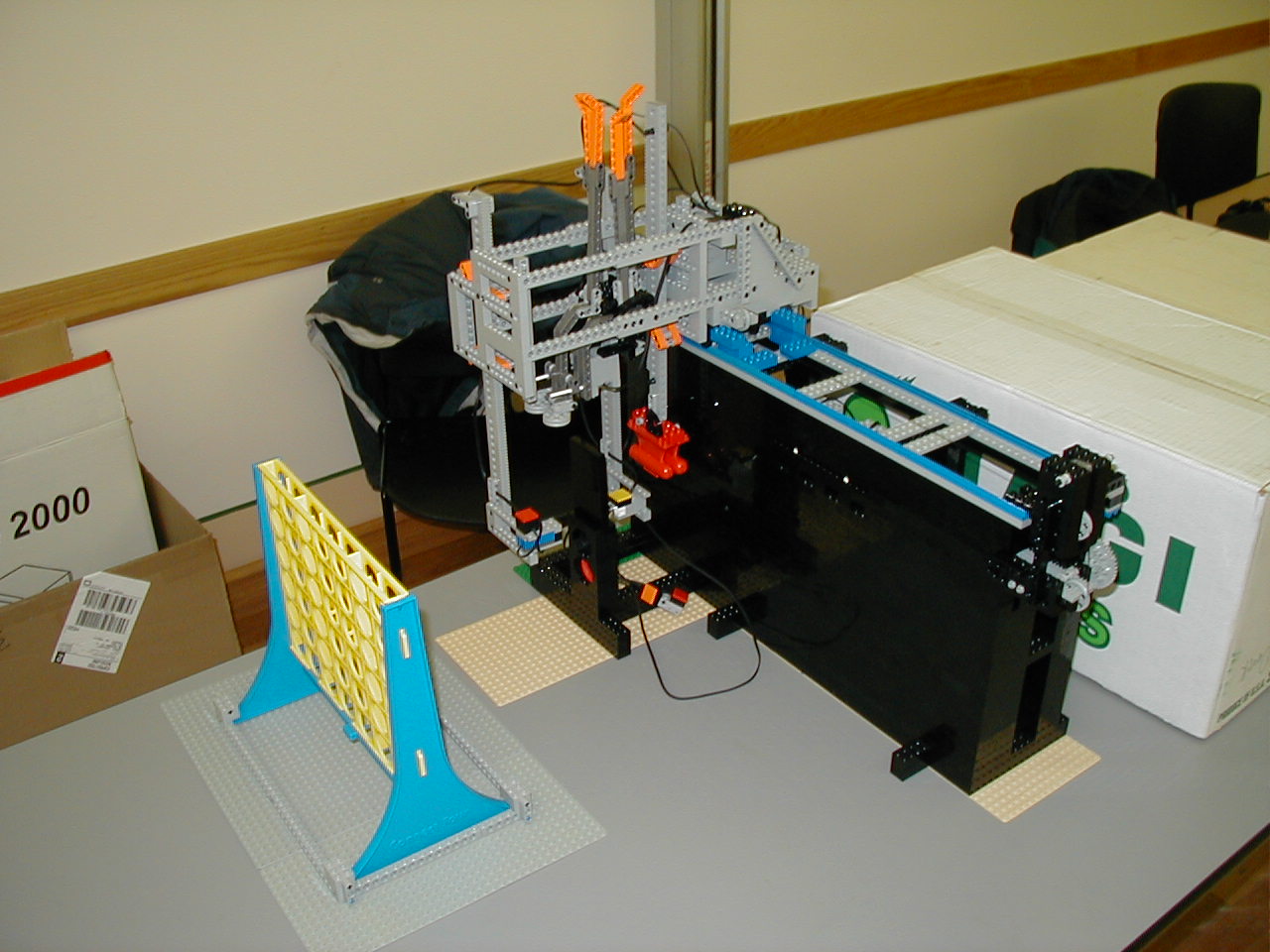
> Greg - the Dipstick from the top
Worked great every day this week. Except Saturday. Continued working when we
returned home.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/dipstick.jpg
> Dan/Jen/Dave - ??? I don't remember.. all I remember was the animated
> GUY, and the mini- connect 4 game board. sorry
I didn't get to see the robot, or the guy, in action. :(
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/dan_jen_dave2.jpg
> Alex - 12 !!! light sensors
Maybe light sensors will work, if you use more of them. :) Actually, his
downfall was signaling EOT.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/fc_qualifywin.jpg
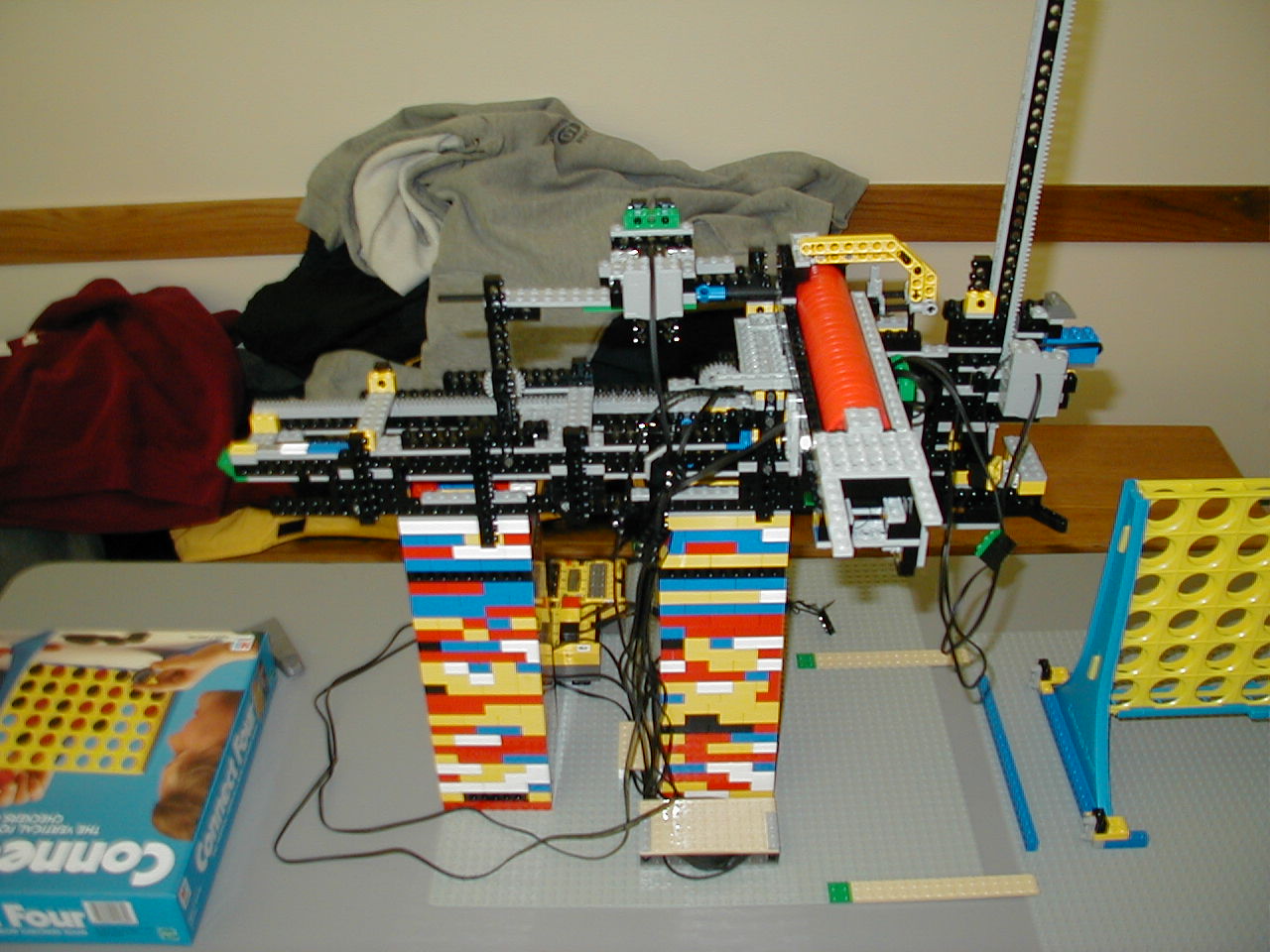
> Steve - # 2 - NOTHING but a tyre as a weight, and motor to drive a dispensing track
It could have tied for third, but it didn't really compete.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/GravityBased/p1060091.jpg
> Mattais -- didn't get a chance to see
> Trevyn -- didn't get a chance to see
same here. :(
> Calum/Mario -- cyber touch sensors to scan many at once.
Would have been nice when it was finished.
http://www.brickshelf.com/gallery/Hassenplug/Contests/rtl15/calum.jpg
Overall, it was a very tough (and fun) challenge.
Steve
"Steve ... came in First. he earned it fair and square." - Chris
|
|
Message is in Reply To:
 | | C$ -- its all over
|
| What a whirlwind of a day. I've been busy with personal commitments for the remainder of the week, so have not had a chance to talk about C$.. with that said.... this is how the final four breaks down: Steve the guy we all Love to hate, came in (...) (22 years ago, 2-Feb-04, to lugnet.org.ca.rtltoronto)
|
2 Messages in This Thread:
 
- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}