 | | | | | |
New Mecha
Blue Bear - 21 inches
tall - built in 4 days.

Exercise in blending a multiple of techniques to achieve the best results.
eric
| | | | | | | | | | | | | | | |
In lugnet.announce.moc, Eric Sophie wrote:
| |
New Mecha
Blue Bear - 21
inches tall - built in 4 days.

Exercise in blending a multiple of techniques to achieve the best results.
eric
|
Hi Eric,
this is amazing. I like how you combined gears and ball joints on Blue Bear.

This is my favourite pose. Seems to me as if he’s a surfer.
Overall Blue Bear doesn’t look as sopieesque to me as your former mecha. Your
style is still visble. But it’s not that obvious/dominating on this one. I rate
this
positive.
I would appreciate if you documented the joints explicite. It is hard to see
how some of them work.
Please take some more detail pics of the frame. The frame is the highlight for
me. Should be quite flexible in coverage. The proportions are good. The hips
and waist are narrow.
In upright pose the middle could even profit of some bulk up. But that’s my
only con.
Well done
Marco
| | | | | | | | | | | | | | | | | | | | |
In lugnet.build.mecha, Marco Tagliaferri wrote:
| |
In lugnet.announce.moc, Eric Sophie wrote:
| |
New Mecha

Blue Bear - 21
inches tall - built in 4 days.
|
|
-Snip-
| |
I would appreciate if you documented the joints explicite. It is hard to see
how some of them work.
Please take some more detail pics of the frame. The frame is the highlight
for
me.
|
-Snip-
Hello Marco, when I completed the main body components I took some pictures
before I started to cover up the frame work. So you are/he/she/they/mini-fig is
are in luck! I even optimized the photos and they are all around or under 150KB,
yay you!

See, I don’t even feel bad about posting this 177KB full size picture now.
Ha ha. Just kidding, enjoy this pic I made.
Ok, anyway, on to the Joint Tech:

Let’s see here, yes the Blue Bear:


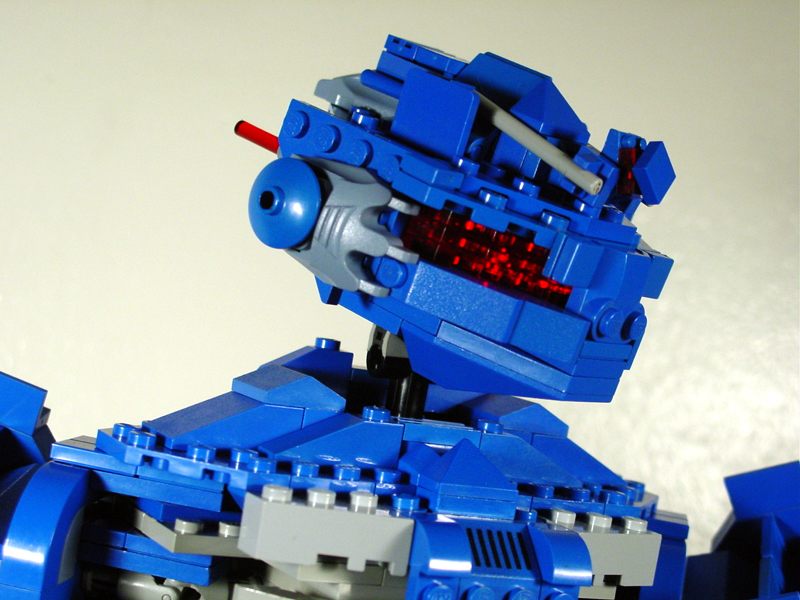
The head was the first part of the Mech that I built.
I used a new Red LED Light Brick that has a TECHNIC push button similar to the
MINDSTORMS Touch Sensor. The head is built around this part.
The neck joint is a ball and socket type, the ball joint is one of those 2L axle
grip part and the socket is the clip with the inner rubber grippy dealy.


Just below the head connection, sits a pair of TECHNIC triangle plate worm gear
boxes. These pair of worm gear drives are mounted right next to each other, so
the component is a 4L in width. This controls the arm’s lift and raise, upper
most shoulder function. The axle’s force passes through a u-joint that is bound
by a horizontal pivot, this pivot agent is a 4x4 click turn table. (blue with
black round 4x4 on top). Just like the Macro Bot and other Mecha Joint Tech I
use. This time it was cool to use the two blue click turntables and see how
small I could make it, plus add to the model’s flexibility.

The upper shoulder splay connection is just two ball joints, but they are the
new types that you can pass an axle all the way through. This way you can build
directly along side the clip and TECHNIC connections. The older original ball
joints that can accept a 1L axle distance, protrude outside the 1 brick
dimension of the clip’s width. Go buy a Toa Matoro #8732 to see what I mean, and
FUT to .marketplace, lol. That set has the new ball joint. It is a great
improvement and still works as a ball joint in the original clip system. The
advantage of having the axle bore go through the whole ball joint, is in the
ability to build in a more compact area and to lock or bind the ball joint to a
clip by passing an axle through the ball joint just as you would a bushing or
TECHNIC plate. Good part. = Improved Mecha
The doubling up of ball joints can be seen in the upper arm rotation.
I used them as rotational friction components. So the lower arm can swing in and
out, plus the axle that passes through the rotational pivot point, is supported
by a blue TECHNIC plate turntable. So the lower arm won’t just separate during
movement. I like those small compact turntables. They attach with 3/4 dark gray
pins, directly to TECHNIC bricks.

The elbow joint is connected to the NEW ball joint. ;)
Allowing the pivot component to be encased in a 4 wide area.
The lower forearm rotation uses a set of old style black friction pins.

The hands were interesting for me. Hands are always tricky. I think we know as
builders, so long as we keep an open mind and rely on creativity, we’ll always
come up with new hands for mecha. That’s what we like to think. Ha, good luck!
BUT oh noooo, hands are hard! and forget about thumbs, lol!
Really, I think at least there is a finite amount of parts that are good for
hands at a relative small scale. Though with Lego, that cannot be true! If we
use creativity, even imagination we will always come up with new parts for
hands. (ya I wish, its hard!) Alas, at the 6 to 18 inch range or so here or
there, it sure is hard to make an original set of hands. Ask Master Gla!
For me I was glad to make a new pair of hands, even if they are strange looking.
By strange I mean, they are just a tad to small in this case, and I think they
are not bendy enough. Not bad for Pipe Wrenches I thought.
In some pictures I think the hands look to scale and in others, not.

The upper body can pivot side to side L/R and it can also bend B/F.
You can see the ball joints that work the side to side pivot of the upper body
in the picture above. One really cool thing is that the side to side splay makes
use of the channel that is found below the 4x4 click turntable.
When bending side to side, the spine and supporting connections actually pass
within the channel below the click turntable that operate the shoulders. Both
systems work together. In both shape and clearance.

The main spine pivot is controlled by a worm driven TECHNIC Throw Bot Gear Box.
That gearbox is surrounded by bricks and then directly mounts to a TECHNIC plate
turntable in the waist to provide upper body horizontal pan and tilt.
Two ball joints are stacked togther with clips to provide rotational friction
for the waist’s upper body horizontal pan. These fit directly between the two
hip joint worm gear drives.


The hip joint is composed of two TECHNIC triangle plate worm gear boxes.
These drive two bricks with axle grips. So the legs can lift. Two ball joints
with the rubberized insert clip sockets create the hip splay. These work really
well and are strong. Key to the ability of the robot to stand. The draw back of
this set up is a high sensitivity to axle twist on the hip joint worm drive.
Since the robot is relying on two axles at the hips, coupled with the inherent
instability of the z24 backlash worm drive component. This is countered by
posing the model to torque its joints against each other, so the forces line up
towards the center of the body, thereby cancelling out the inclination for the
mech to want to lean forward or back.
Like placing one foot in front ahead of you and one foot back to brace yourself
towards the vertical center of gravity of your body.
This takes place in the hips. The entire mech can shift its center of gravity by
minute adjustments of the worm drives in tandem with other joints depending on
how the mech is positioned.


The knees use a worm gear drive set up. The ball gears just transfer the motion
to an easily accessible set of control knobs on the sides of the legs.
What’s neat about the knees to me is they use a seldom included worm gear set up
incorporating TECHNIC quarter oval plates instead of triangle plates or other
known single worm gear box elements.
There is a set of 2x2 click joints in the lower calves’s of the Blue Bear so
the feet can angle and rotate.

The legs were not covered completely in the final build. I left parts of them
open and “see through” to help aid in weight and in the visual sense to keep the
flow of the legs light, since I felt they were getting a little wide due to the
knee and hip components. The ankles feature the same type of worm gear set up as
contained in the knees. The ankle’s side to side splay is assisted by frictional
3L pins to aid in the legs hip splay control.

I still wish I would have included a bending toe set up. That would have been
great, maybe worth revisiting? I decided against it as the foot was getting big
already, due to the way the ankle pivot and splay were created, and well, for a
lack of parts.

The Blue Bear’s frame is flexible and I would say of fair stability, even with
the z24’s and axles. The way the legs and feet work together provides for good
stability. Though I won’t kid, it does take some concentration to pose and
balance. When the Mech crouches down, it is the most stable and can be pushed
with some force before shifting its weight. I like how it looks, like it is
about to jump:

more pics...
The frame is 21 inches tall, it can reach up high too:

640x480
Standard size
| | 
1600x1200
Large size
|
I will replace the shoulder splay clips with the ones that have the rubber
insert to make that joint stronger.

Here is the final Mech completed.
For me this is not as much about a “Frame” as it is in the components and
variety of joint types for specific uses. Then putting select components
together to form the basis of the mecha joints. The neat thing is when all the
components come together.
I didn’t set out to make a universal builder frame, this is just a series of
pictures I took before the joints became covered or blocked from view.
Though I would guess a pure TECHNIC scale armature would look very similar,
along with the many great frames built by other builders. Many of those frames
use TECHNIC. Anyway, I just didn’t want any readers to think I was presenting a
frame of my own. Each skeleton I build for my mechs are specific to the
creation, though some joint tech is interchangeable. Just want to clarify.
Enjoy! ...and I hope that help to see how the joints work.

Blue Bear - Joint Tech
Frame Page
Blue Bear -
Full Gallery
Thank you.
-eric
| | | | | | | | | | | | | | | | | | |
Hi eric,this thing is amazing!Pros: the joints are very good and the head is
just like a bears.Cons: The body could be thicker in the middle. Overall 9 out
of 10. From,lukas
| | | | | | | | | | | | | | | | | | | | |
In lugnet.build.mecha, Lukas Nabergall wrote:
> Hi eric,this thing is amazing!Pros: the joints are very good and the head is
> just like a bears.Cons: The body could be thicker in the middle. Overall 9
> out of 10. From,lukas
Thank you for the high marks Lukas. The thin waist is a design choice and
accommodates the flex in the spine by not causing a collision between the upper
body and the Technic that connects to the Throw Bot Gear Box. Though, I'd like
it to be a little bigger some how too.
The things I tried interfered with the way the body bends. So I left it lean and
flexible. One day I'll make a spine section with a bunch of ribbed hoses or
something around the "waist stalk".
My nits are, I think the hands are cool, but too small, and not bendy enough.
The feet are cool, but I'd like to have included bending toes.
The shoulders need those grippy clips instead of the regular ones to help make
the splay stronger.
Other than that, I like it, glad you did too.
Keep building.
-eric
| | | | | | | | | | | | | | | | | | |
Hey Eric, i love how you used such cool joints and the gears in the knees look
cool, i like how the head lights up to, great job
-Ben
| | | | | | | | | | | | | | | | | | | | |
In lugnet.build.mecha, Ben Cooper wrote:
> Hey Eric, i love how you used such cool joints and the gears in the knees
> look cool,
Thanks! I try to use proven techniques, plus I try to use what I have and these
parts added up for my to be able to make a Mech.
I think the next one I will do, I may try some different joints because I am
running low on worm gears. Actually, I need another 3 foot Mecha. Who knows?
> i like how the head lights up to, great job
Thanks, that new light brick with technic push button is so cool.
> -Ben
Thanks Ben!
-eric
| | | | | | | | | | | | | | | | | |
Hello Eric!
Blue Bear is awesome fantastically!
I realized very late that your Blue Bear is 21 inches tall!
Thanks for sharing the Blue-Bear-Frame folder to!
Thats allows to have a look
on the great frame!
It will need time for me to understand how it works...
Blue Bear has a cool Style!
I am very very impressed to see that this high and great Mecha stands on so
litle feeds!
The head looks very cool, better than the Black Bear in my mind.
I love this
head.
I like this new Mecha a much!
And I want to replicate this great Mecha, but this will need more time, and I
need more understanding how Mecha creating works, mainly to yous gears.
I generally like your Mechabuilding style. Your Mechas look like big machines,
thats what I like eigentlich(german) on Mechas.
Organic Mechas I like too, but
mainly I like Maschine Mechas!
Keep on building!
Regards Dan
| | | | | | | | | | | | | | | | |
In lugnet.build.mecha, Dan Demmler wrote:
| |
Hello Eric!
Blue Bear is awesome fantastically!
|
Yay! Thank you! I brought the Blue Bear to my Lego Classes and the kids loved
it. Some of the High School students want to go home and make their own.
It was easy to put in a box and carry on the train, they will have to wait for
the larger ones.
| |
I realized very late that your Blue Bear is 21 inches tall!
|
Yes, I tried to make the legs long and slender. Trying to make the proportions
correct. Sometimes the function gets in the way, and some times the parts I need
become hard to find. This time I think it worked out good.
| |
Thanks for sharing the Blue-Bear-Frame folder to!
Thats allows to have a
look on the great frame!
It will need time for me to understand how it
works...
|
When I answered Marco’s request I wrote about how all the joints work. Check
that out in this thread.
| |
Blue Bear has a cool Style!
|
:)
| |
I am very very impressed to see that this high and great Mecha stands on so
litle feeds!
|
The feet should have been more interesting. I wish I added bending toes.
Hopefully next time.
| |
The head looks very cool, better than the Black Bear in my mind.
I love
this head.
|
The head was the first thing I made. I wanted to try making a head that was
similar in style to the Cub and BLACK BEAR. I think the design can have a number
of variations that will be interesting to try to build.
| |
I like this new Mecha a much!
And I want to replicate this great Mecha, but this will need more time, and I
need more understanding how Mecha creating works, mainly to yous gears.
|
Any time you have questions, post them and perhaps others can learn along too.
| |
I generally like your Mechabuilding style. Your Mechas look like big
machines, thats what I like eigentlich(german) on Mechas.
Organic Mechas I
like too, but mainly I like Maschine Mechas!
|
Thank you, I suppose after all these years of making so many of them, most of
them have some commonality. I like both Machine and Organic Mecha, blending the
two so you are not sure which one is predominant is often suprising and loads of
fun.
| |
Keep on building!
Regards Dan
|
Thank you!
-eric
| | | | | | |
