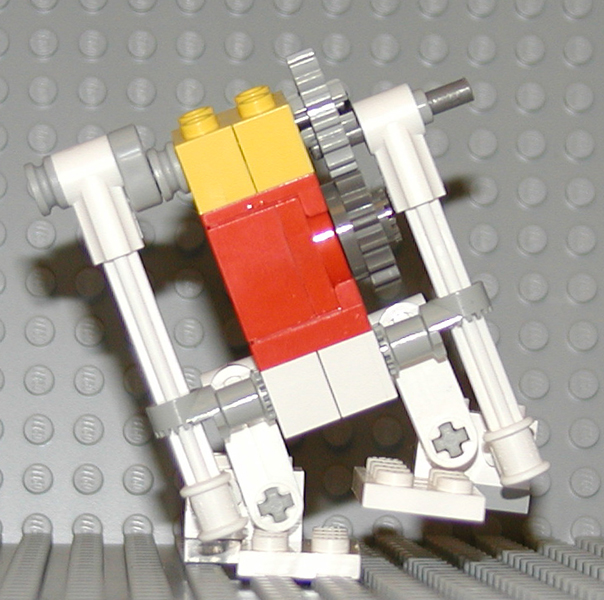
I hope you enjoy my 6th version of my micromotor based weight shifting walker.
I've been able to eliminate the need for two parts by improving the leg geometry
of uCOG V.
By changing the way the drive axles attach to the foot, you can adjust the
length of the drive angle with better resolution than 1 stud. This allows you to
adjust the axles so the feet do not hit each other. This eliminates the need
for the slopes on the feet that deflect the feet away from each other.
This change, combined with the use of 1x2 beam with two holes, gives a more
compact and smaller part count weight shifting walker.
(...) I made a video of this one walking. The amount of leg lift on this little one is quite big given that it has no knees. (URL) (22 years ago, 7-Jul-03, to lugnet.technic, lugnet.robotics, lugnet.build)

{kind=link}
{kind=link}
{kind=link}