| |
Hey everyone.
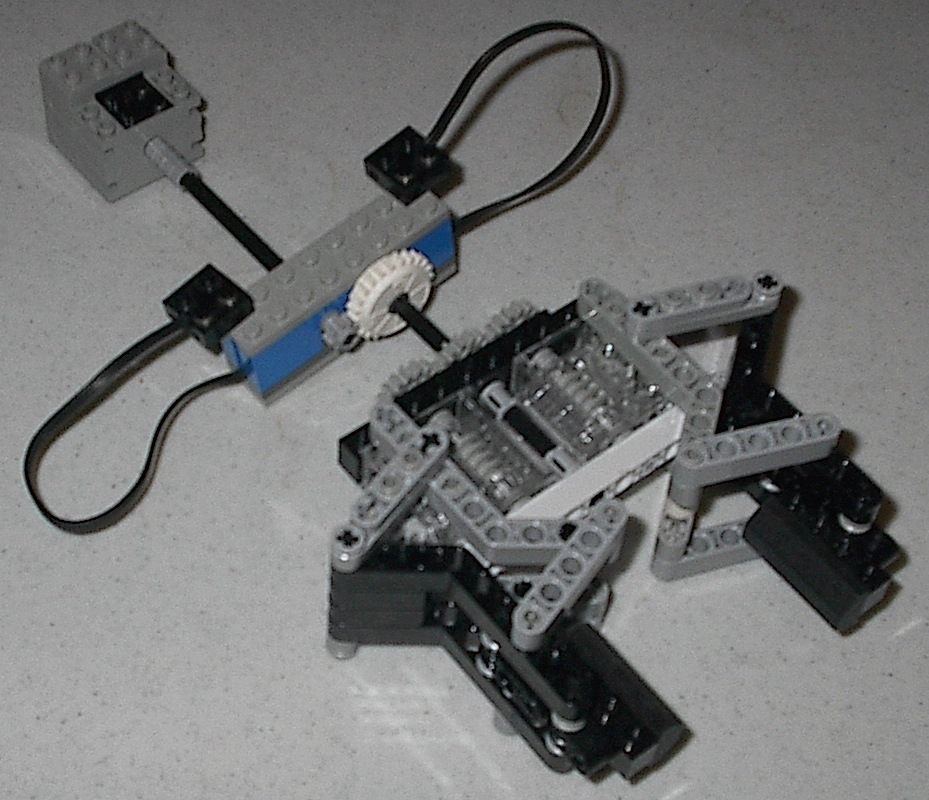
I have built a realistic grasping end effecter that can feel when something in
is its grasp (without touch sensors). I have attached a deconstructed version
that I use.
http://www.brickshelf.com/gallery/BuckeyeShep/ArticulatedArm/end_effector.jpg
The principle is pretty simple. As the end effecter closes and touches the
object, the worm gears cause the fingers to securely grasp the object. On the
power train up to the end effecter, there are two rotation sensors, one with a
rigid spur gear and one with a slip clutch gear. As long as the rotation
sensors relative position (in this case, a 3:1 ratio) remains the same (i.e.,
the clutch hasn't begun to slip), there is nothing sensed and the motor
continues to close the fingers. As soon as something is securely grasped, the
clutch begins to slip and the relative positions of the rotation sensors will no
longer match. This condition would be sensed and the program would stop the
motor.
Opening the fingers would work in the same fashion. When the linkage hits
something so the fingers can't open any further, the clutch again spins and the
motors would be turned off. I haven't shown it, but on the bottom side I have
constructed a mechanical stop.
The end effecter is slightly rickety, but effective none the less. The
non-reversing nature of the worm gears gives a firm and non releasing grip. The
fingers give a really nice parallel motion that consistently meets at the same
position every time.
I prefer to use an old 9v motor for a couple of reasons. The gear ratio that is
shown gives a nice smooth motion that is not too slow or too fast at full speed.
I also like it because the motor is relatively light so it won't add a bunch of
weight at the end of a long arm.
It uses to input ports, which many won't like. I always use two programmable
bricks when I build articulated arms, so for me it doesn't hurt (much).
I like this design because the end effecter resembles a lot of hobby-like and
commercially available types
Chris
|
|
Message has 2 Replies:
 | | Re: End effector that can "feel"
|
| (...) Nice. And I agree, nice-looking. I once Bricklinked some of those same "rubber skirt" pieces for this, but never did get them in an effecter that I liked (I was trying smaller at the time). Now I use the flexible 1x2 studless beams that first (...) (19 years ago, 19-Jan-08, to lugnet.technic, lugnet.robotics)
| | | Re: End effector that can "feel"
|
| Hi, this is a very good solution! I really like the way this is done, even if it uses 2 sensor ports. The use of the double gear boxes to close the fingers at the same time is very nice! Really great work, excellent end effector solution. Eric (...) (18 years ago, 27-Feb-08, to lugnet.technic, lugnet.robotics)
|
4 Messages in This Thread:
  

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}