Subject:
|
January Meeting: Photos, Results, and Next Challenge
|
Newsgroups:
|
lugnet.org.us.smart
|
Date:
|
Tue, 29 Jan 2002 18:59:54 GMT
|
Viewed:
|
4656 times
|
| |

|
|
Hello Everyone!
On Saturday, January 26, 2002, SMART had it's first anniversary meeting.
The Mini-Challenge for this meeting was to build a drag-race robot that
could race 16' down the library carpet and come to a stop within 6" of a
reflective line.
Photos:
http://www.brickshelf.com/gallery/GJansson/SMART/Meetings/Jan2002/
There were at least 6 robots prepared. It turned out that one of the
hardest parts was coming to a stop within the 6 inches. Only three robots
succeeded. Here are the full results:
Time Stopped in 6"?
Nathan 3.75 no
Gus 3.6 yes (2" under)
David 5.2 no (1" over)
Nick 44.2 yes (stopped on the reflective line)
Sam 4.8 4" over
Steve 5.1 yes (right on the line!)
My winning robot featured a two speed gearbox in the rear that was designed
so that when the motors(two of them) selected the gear by the direction they
turned. Both directions were geared so that it resulted into a forward
motion. In the front there was a similar design except that instead of two
gears (single speed) it activated a brake mechanism when the motor ran in
reverse.
In addition to the mini-challenge, there were a few other robots there as
well. There was a plotter from the ultimate builders set and a treaded
robot that was designed to stay within a black circle (sumo robot?). I also
brought a recreation of a helicopter toy that, with the assistance of an
elastic band, was able to fly. By adjusting the pitch, the helicopter could
fly in both clockwise and counter-clockwise direction around a base.
Next mini-challenge:
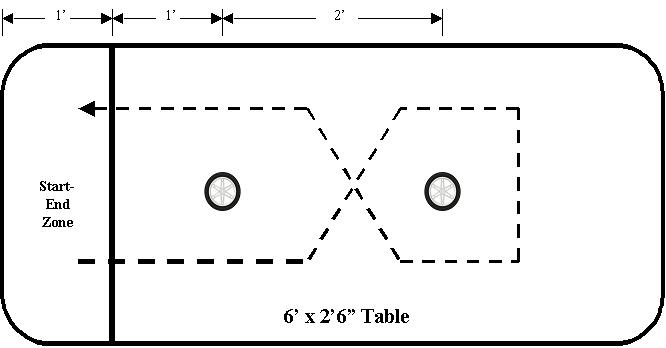
After discussing several options, we choose a dead-reckoning challenge for
our next meeting. The goal is to build a robot that can drive around two
markers in a figure eight like pattern. A 6' x 2'6" table will be prepared
as follows: One foot from one end of the table a black tape will be laid
across the entire width of the table. One foot from this line, centered to
the width of the table, will be placed one large Mindstorms wheel. Two feet
further down from that wheel (three feet from tape), another large
Mindstorms wheel will be placed centered to the width of the table. To
complete the course, the robot must start behind the line and drive in
between the two wheels, around the far wheel, back in between the two wheels
and then back across the line and stop. The winner is the fastest robot to
complete the course. Note, the robot must come to a stop at the end of the
run without falling off the table and must not touch either of the wheels
used as markers.
Here is a diagram of the table:
http://www.brickshelf.com/gallery/GJansson/SMART/Meetings/March2002/drtable.jpg
The next meeting will be in room 2 at the Redmond library on March 30th from
2-5.
In addition to working on the robot for the next Mini-Challenge, don't
forget the next Workshop 3D challenge scheduled for April 13. The events at
the next Workshop 3D challenge have not been finalized though most likely it
will just be a refinement from previous RCX challenges.
In another announcement, David mentioned that the Pacific Science Center
will be holding a robotics exhibit from April 10 to 14. They have asked us
to build Mindstorms robots that can be exhibited or demod during this event.
Hopefully this will coincide with a new Lego Mindstorms center at the
Pacific Science Center though this has not been finalized yet.
Another robotics event coming up is the SRS Robothon on May 3rd and 4th. If
you are not familiar with the Robothon then you should checkout their site.
This is not just Lego robots but open too all kinds of amateur robotics.
The competition events include the LineMaze won last year by my Alegomazer
robot.
http://www.seattlerobotics.org/robothon/
Gus
|
|
1 Message in This Thread:

- Entire Thread on One Page:
- Nested:
All | Brief | Compact | Dots
Linear:
All | Brief | Compact
|
|
|
|
{kind=link}